Download as pdf or txt
You might also like
- Screw Conveyor Design and DevelopementDocument42 pagesScrew Conveyor Design and DevelopementRohit Sengar100% (3)
- World Air Forces 2018Document19 pagesWorld Air Forces 2018aseriousdude100% (4)
- TRW Pintle EngineDocument23 pagesTRW Pintle EngineMuhammad Azeem AhmadNo ratings yet
- CFD Tutorial 4 - External Aerodynamics of A UAVDocument19 pagesCFD Tutorial 4 - External Aerodynamics of A UAVMichal NoconNo ratings yet
- Cessna 210&T210 1977 1984 MM D2057-3-13 PDFDocument798 pagesCessna 210&T210 1977 1984 MM D2057-3-13 PDFGeorge Cunha LimaNo ratings yet
- Nieuport Aircraft of Wold War One (PDFDrive)Document194 pagesNieuport Aircraft of Wold War One (PDFDrive)Dominun Severa100% (1)
- 7083 6799 Cast Bronze Bearing Design ManualDocument72 pages7083 6799 Cast Bronze Bearing Design ManualguilleaguadoNo ratings yet
- Heavy Lift Installation Study of Offshore Structure 2004Document203 pagesHeavy Lift Installation Study of Offshore Structure 2004Quang-derer75% (4)
- Lecture Notes 2Document7 pagesLecture Notes 2Edwin kinyuaNo ratings yet
- Bucket ElevatorDocument9 pagesBucket ElevatorkavyaNo ratings yet
- Design of A High Speed Grinding MachineDocument113 pagesDesign of A High Speed Grinding MachineResearch1 amtdcNo ratings yet
- Structural Analysis of Aircraft Landing Gear During Rough Landing1519287328Document6 pagesStructural Analysis of Aircraft Landing Gear During Rough Landing1519287328Sheik Farith100% (1)
- Design and Fabrication of Pneumatic Crane StartDocument6 pagesDesign and Fabrication of Pneumatic Crane StartHimani MahetaNo ratings yet
- Internship Report On Static Test Pad For Rocket Motor at Star - Space Technology and Aeronautical RocketryDocument17 pagesInternship Report On Static Test Pad For Rocket Motor at Star - Space Technology and Aeronautical RocketrySaheb BediNo ratings yet
- Crankshaft: Page NoDocument13 pagesCrankshaft: Page NoAmit GauravNo ratings yet
- Design and Stability of Composite Ship Propeller Using Fem AnalysesDocument7 pagesDesign and Stability of Composite Ship Propeller Using Fem AnalysesSrinivas AllamNo ratings yet
- A Project Progress Report ON "Roller Metal Bender": Bachelor of Technology IN Mechanical EngineeringDocument15 pagesA Project Progress Report ON "Roller Metal Bender": Bachelor of Technology IN Mechanical EngineeringGourav KashyapNo ratings yet
- Dme-2 byDocument81 pagesDme-2 byHauaisnNo ratings yet
- Fabrication and Testing of Scaled Prototype of HoverbikeDocument4 pagesFabrication and Testing of Scaled Prototype of HoverbikeNoelNo ratings yet
- Advances in Blade Geometry: The Stallfree PropellerDocument128 pagesAdvances in Blade Geometry: The Stallfree PropellerLászló KruppaNo ratings yet
- Directional DrillingDocument129 pagesDirectional DrillingYuri Kost100% (7)
- Acree AHSVLADC2006Document9 pagesAcree AHSVLADC2006Shobhit SharmaNo ratings yet
- Ose 0502003Document17 pagesOse 0502003MjNo ratings yet
- Hoisting System - Notes - Jun-16Document214 pagesHoisting System - Notes - Jun-16Mhamed ShahatNo ratings yet
- Ch14 BearingsDocument76 pagesCh14 Bearingsabdallah ghannamNo ratings yet
- Rotary SystemDocument9 pagesRotary SystemHomam MohammadNo ratings yet
- Lesson 02 Basic Composition PDFDocument60 pagesLesson 02 Basic Composition PDFgustavogfpNo ratings yet
- Dokumen - Tips - Aircraft Design Project 1 568e8c1761270 PDFDocument74 pagesDokumen - Tips - Aircraft Design Project 1 568e8c1761270 PDFZheer Safeen SuleimanNo ratings yet
- Design and Stability of Composite Ship Propeller Using Fem AnalysesDocument6 pagesDesign and Stability of Composite Ship Propeller Using Fem AnalysesSrinivas AllamNo ratings yet
- NASA Rotor AirjoilsDocument96 pagesNASA Rotor AirjoilsВлад КанжяNo ratings yet
- BR G-7Document37 pagesBR G-7Birhanu AsfawNo ratings yet
- Technical Reports - AssignmentDocument28 pagesTechnical Reports - AssignmentJosephNo ratings yet
- Design of Bearings & Miscellaneous ElementsDocument14 pagesDesign of Bearings & Miscellaneous ElementsjvanandhNo ratings yet
- 14 Chapter4 PDFDocument18 pages14 Chapter4 PDFTedros KassaNo ratings yet
- Quadcopter Design DocumentDocument23 pagesQuadcopter Design Documentapi-556772195No ratings yet
- Machine DesignDocument2 pagesMachine DesignRam Sharan PrajapatiNo ratings yet
- Criteriafordesign Genlikator Foundation For Hydroelectric PowerstationsDocument10 pagesCriteriafordesign Genlikator Foundation For Hydroelectric PowerstationsRajashekar.PNo ratings yet
- Hull Basic Training Course: Outfitting (Rudder, Hatch Cover)Document26 pagesHull Basic Training Course: Outfitting (Rudder, Hatch Cover)ding liuNo ratings yet
- Development of An Optimization Framework For Landing Gear DesignDocument91 pagesDevelopment of An Optimization Framework For Landing Gear DesignRaniero Falzon100% (1)
- Ad 0602634Document607 pagesAd 0602634cerden1998No ratings yet
- Otc 18587 MS PDocument15 pagesOtc 18587 MS PSiul Otrebla AtelavazNo ratings yet
- Handbook On Railway Construction-401-500Document100 pagesHandbook On Railway Construction-401-500yamegNo ratings yet
- 5 - Fuselage Design Version 9-Mar-20Document89 pages5 - Fuselage Design Version 9-Mar-20whatdoedirtNo ratings yet
- Rocker ReportDocument26 pagesRocker ReportAmal TharakaNo ratings yet
- ZOLLERN-Broschuere Antriebstechnik Slewing GearsDocument20 pagesZOLLERN-Broschuere Antriebstechnik Slewing GearsTodor GrudevNo ratings yet
- Design Review of A 4-Storied Industrial Building With Mezzanine FloorDocument29 pagesDesign Review of A 4-Storied Industrial Building With Mezzanine FloorAsif Mostafa AnikNo ratings yet
- ICSMGE2022 Thusyanthan Designguidancefortank FINALDocument7 pagesICSMGE2022 Thusyanthan Designguidancefortank FINALVidyaParamasivamNo ratings yet
- Design of The Drive Mechanism For A Reciprocating Coal FeederDocument81 pagesDesign of The Drive Mechanism For A Reciprocating Coal FeederemersonNo ratings yet
- Dual Chamber Rocket Motor InvestigationDocument56 pagesDual Chamber Rocket Motor InvestigationCliff ThriveNo ratings yet
- 450 458Document9 pages450 458metal tuzaroNo ratings yet
- Design and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftDocument6 pagesDesign and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftTushar KoulNo ratings yet
- Design of Liner Puller PresentationDocument29 pagesDesign of Liner Puller PresentationKirubel MogesNo ratings yet
- Irjet V3i7146 PDFDocument6 pagesIrjet V3i7146 PDFatulnarkhede2002No ratings yet
- Is 7207 1992 PDFDocument13 pagesIs 7207 1992 PDFGopu RNo ratings yet
- ITTC - Propellers Dimensions 75-01-02-02Document8 pagesITTC - Propellers Dimensions 75-01-02-02vkoNo ratings yet
- ACGT 2014 0142FullPaperDocument8 pagesACGT 2014 0142FullPaperAsmaa Alaa ElDeenNo ratings yet
- Bunker Supporting Structure & Operating Platform LayoutDocument77 pagesBunker Supporting Structure & Operating Platform LayoutShriniwas NaikNo ratings yet
- Aerospace Engineering, PG. Scholar (Aero), PG. Scholar (Aero), MLR Institute of Technology, Hyderabad, IndiaDocument8 pagesAerospace Engineering, PG. Scholar (Aero), PG. Scholar (Aero), MLR Institute of Technology, Hyderabad, IndiaMasoud doskiNo ratings yet
- Table of ContentDocument11 pagesTable of ContentHimanshu MishraNo ratings yet
- Techdoc PDFDocument125 pagesTechdoc PDFjoojoo987654321No ratings yet
- Small Unmanned Fixed-wing Aircraft Design: A Practical ApproachFrom EverandSmall Unmanned Fixed-wing Aircraft Design: A Practical ApproachNo ratings yet
- Structural Sizing of A Rotorcraft Fuselage Using An Integrated Design ApproachDocument14 pagesStructural Sizing of A Rotorcraft Fuselage Using An Integrated Design ApproachAlper DedeNo ratings yet
- Designing and FEM Simulation of The Helicopter Rotor and HubDocument11 pagesDesigning and FEM Simulation of The Helicopter Rotor and HubAlper DedeNo ratings yet
- Structural Analysis of A Rotorcraft Fuselage in A Multidisciplinary EnvironmentDocument20 pagesStructural Analysis of A Rotorcraft Fuselage in A Multidisciplinary EnvironmentAlper DedeNo ratings yet
- A Study of Helicopter Aerodynamics in Ground EffectDocument219 pagesA Study of Helicopter Aerodynamics in Ground EffectAlper DedeNo ratings yet
- 12714-Article Text-43541-3-10-20201105Document8 pages12714-Article Text-43541-3-10-20201105Alper DedeNo ratings yet
- 2 Airside Facilities PDFDocument67 pages2 Airside Facilities PDFBarkat LaghariNo ratings yet
- Standardization of The Carbon-Phenolic Materials and ProcessesDocument281 pagesStandardization of The Carbon-Phenolic Materials and Processesuebricc100% (1)
- Naca 0012 DescriptionDocument14 pagesNaca 0012 DescriptionVarghese MathewNo ratings yet
- DIVYAA SAXENA - 10110017 PRIYANKA SINGH - 10110044 B.Arch Iv Year AR-414 Futuristic ArchitectureDocument15 pagesDIVYAA SAXENA - 10110017 PRIYANKA SINGH - 10110044 B.Arch Iv Year AR-414 Futuristic ArchitectureDivyaa Saxena100% (1)
- CS-23 Amdt 3 PDFDocument405 pagesCS-23 Amdt 3 PDFGiovanni PerisiNo ratings yet
- Rolls-Royce: Commercial Engine BulletinDocument1 pageRolls-Royce: Commercial Engine BulletinturboshaftNo ratings yet
- Rapi-Dos Manual EN v1.0-1Document12 pagesRapi-Dos Manual EN v1.0-1Alberto RequesNo ratings yet
- Aircraft Environmental Control SystemsDocument26 pagesAircraft Environmental Control SystemsAnonymous C9ZNFkrb6No ratings yet
- Demonstration Pelton TurbineDocument6 pagesDemonstration Pelton TurbineNadia NursyazwinaNo ratings yet
- Skrgkmia PDF 1712619934Document29 pagesSkrgkmia PDF 1712619934mcoloniamNo ratings yet
- Types Ground Based Airport Amphibious AirportDocument19 pagesTypes Ground Based Airport Amphibious AirportSuhail AhmedNo ratings yet
- Journal of Sound and Vibration: Rapid CommunicationsDocument9 pagesJournal of Sound and Vibration: Rapid CommunicationspaulkohanNo ratings yet
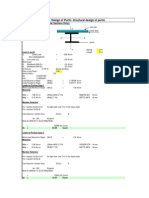
- Structural Design of PurlinDocument3 pagesStructural Design of PurlinGeorge GeorgianNo ratings yet
- Internship ReportDocument55 pagesInternship ReportsabaNo ratings yet
- GED Spain - BrochureDocument14 pagesGED Spain - BrochureMiguel Angel Granados RomeroNo ratings yet
- Amca 600-16Document28 pagesAmca 600-16Gustavo Montanez100% (1)
- Flight Simulation ReportDocument6 pagesFlight Simulation Reportlikith333No ratings yet
- Elecrtical Thrust Vector Control Details - Tillo VanthuyneDocument7 pagesElecrtical Thrust Vector Control Details - Tillo VanthuyneCosmisteNo ratings yet
- RTW - Malaysia Airlines ScheduleDocument132 pagesRTW - Malaysia Airlines Schedulezannilupo100% (1)
- Transfer Terminals Magdragon I and II, Ref Sheet, March2012 - PRINT - Original - 46598Document2 pagesTransfer Terminals Magdragon I and II, Ref Sheet, March2012 - PRINT - Original - 46598theodorebayu100% (1)
- 680A Version 45Document27 pages680A Version 45Patricio MontemayorNo ratings yet
- How The Alpha Auto Transaxle WorksDocument16 pagesHow The Alpha Auto Transaxle WorksyogapostNo ratings yet
- Case Study The Air Astana Conundrum WhyDocument12 pagesCase Study The Air Astana Conundrum WhyAndrew TanNo ratings yet
- Nielson RV Flag Pole Official Engineering Plans Structural Details and CalculationsDocument26 pagesNielson RV Flag Pole Official Engineering Plans Structural Details and CalculationssujanNo ratings yet
- CarrLane Jig FixtureDocument36 pagesCarrLane Jig FixtureseminarprojectNo ratings yet
- Paris Dublin A321nDocument55 pagesParis Dublin A321nLouisNo ratings yet