Download as pdf or txt
You might also like
- Review PaperDocument13 pagesReview PaperKomal SinghNo ratings yet
- Numerical Methods for Stochastic Computations: A Spectral Method ApproachFrom EverandNumerical Methods for Stochastic Computations: A Spectral Method ApproachRating: 5 out of 5 stars5/5 (2)
- Drake - Set TheoryDocument361 pagesDrake - Set TheoryRaúl Ibáñez CouohNo ratings yet
- 14 Aos1260Document31 pages14 Aos1260Swapnaneel BhattacharyyaNo ratings yet
- TSP Cmes 41283Document25 pagesTSP Cmes 41283ranim najibNo ratings yet
- 2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipDocument33 pages2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipEthemNo ratings yet
- Quantile MechanicsDocument18 pagesQuantile MechanicsAgossou Alex AgbahideNo ratings yet
- JP FernandezDocument251 pagesJP FernandezDiiana WhiteleyNo ratings yet
- Mathematical Programming For Piecewise Linear Regression AnalysisDocument43 pagesMathematical Programming For Piecewise Linear Regression AnalysishongxinNo ratings yet
- RegtutorialDocument32 pagesRegtutorialДарина ВахрушеваNo ratings yet
- 1 s2.0 S0266352X16300143 MainDocument10 pages1 s2.0 S0266352X16300143 Maina4abhirawatNo ratings yet
- Approximation Models in Optimization Functions: Alan D Iaz Manr IquezDocument25 pagesApproximation Models in Optimization Functions: Alan D Iaz Manr IquezAlan DíazNo ratings yet
- Abstracts MonteCarloMethodsDocument4 pagesAbstracts MonteCarloMethodslib_01No ratings yet
- Sood 1979Document10 pagesSood 1979Saif EvonyNo ratings yet
- Exploring Matrix Generation Strategies in Isogeometric AnalysisDocument20 pagesExploring Matrix Generation Strategies in Isogeometric AnalysisJorge Luis Garcia ZuñigaNo ratings yet
- Practical Fuzzy "Nite Element Analysis of Structures: U.O. Akpan, T.S. Koko, I.R. Orisamolu, B.K. GallantDocument19 pagesPractical Fuzzy "Nite Element Analysis of Structures: U.O. Akpan, T.S. Koko, I.R. Orisamolu, B.K. Gallantsaliah85No ratings yet
- Fast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsDocument11 pagesFast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsMirkoNo ratings yet
- Choi 2018Document13 pagesChoi 2018Agossou Alex AgbahideNo ratings yet
- Engineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimDocument9 pagesEngineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimEduardo PutzNo ratings yet
- Introduction To Numerical Methods: 19-23 September 2005Document3 pagesIntroduction To Numerical Methods: 19-23 September 2005Venkadesh KannanNo ratings yet
- EpsocDocument8 pagesEpsocapi-3712774No ratings yet
- Additive ModelDocument8 pagesAdditive ModelJung AttilaNo ratings yet
- RusinowskiDocument17 pagesRusinowskiZakaria AzizNo ratings yet
- Machine-Learning Error Models For Approximate Solutions To Parameterized Systems of Nonlinear EquationsDocument47 pagesMachine-Learning Error Models For Approximate Solutions To Parameterized Systems of Nonlinear Equationschethan mahadevNo ratings yet
- Robust Design Optimization in Aeronautics UsingDocument21 pagesRobust Design Optimization in Aeronautics UsingReyMysterioNo ratings yet
- AIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryDocument15 pagesAIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryRomoex R RockNo ratings yet
- A Unified Framework For High-Dimensional Analysis of M - Estimators With Decomposable RegularizersDocument45 pagesA Unified Framework For High-Dimensional Analysis of M - Estimators With Decomposable RegularizersCharles Yang ZhengNo ratings yet
- Multivariable Identification of An Activated Sludge Process With Subspace-Based AlgorithmsDocument9 pagesMultivariable Identification of An Activated Sludge Process With Subspace-Based Algorithmsmmm4b9a6No ratings yet
- Maths DA2 (Research Paper)Document8 pagesMaths DA2 (Research Paper)aayush.singh007studyNo ratings yet
- Sequential Modular and Simultaneous Modular StrategiesDocument13 pagesSequential Modular and Simultaneous Modular Strategieskim haksongNo ratings yet
- 03 Litreature ReviewDocument11 pages03 Litreature ReviewHanny Khn007No ratings yet
- Efficient Sampling TechniquesDocument8 pagesEfficient Sampling Techniquesmostafa aliNo ratings yet
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroNo ratings yet
- On The Pareto Optimum Sensitivity Analysis in Multicriteria OptimizationDocument23 pagesOn The Pareto Optimum Sensitivity Analysis in Multicriteria Optimizationdtn2008No ratings yet
- Graphical Models, Exponential Families, and Variational InferenceDocument305 pagesGraphical Models, Exponential Families, and Variational InferenceXu ZhimingNo ratings yet
- Kinetic Uncertainty Single Chance ConstraintDocument9 pagesKinetic Uncertainty Single Chance ConstraintShu-Bo YangNo ratings yet
- Adoption of Parallel Genetic Algorithms For The Solution of System of EquationsDocument5 pagesAdoption of Parallel Genetic Algorithms For The Solution of System of EquationsWhite Globe Publications (IJORCS)100% (1)
- Tensor Decompositions For Learning Latent Variable Models: Mtelgars@cs - Ucsd.eduDocument54 pagesTensor Decompositions For Learning Latent Variable Models: Mtelgars@cs - Ucsd.eduJohn KirkNo ratings yet
- Basic Sens Analysis Review PDFDocument26 pagesBasic Sens Analysis Review PDFPratik D UpadhyayNo ratings yet
- 2023 5 Data-Driven Parameter Estimation NonlinearDocument20 pages2023 5 Data-Driven Parameter Estimation NonlinearNguyễn Đức SangNo ratings yet
- Explaining Performance of The Threshold Accepting Algorithm For The Bin Packing Problem: A Causal ApproachDocument5 pagesExplaining Performance of The Threshold Accepting Algorithm For The Bin Packing Problem: A Causal ApproachlauracruzreyesNo ratings yet
- Estimation Strategies For The Regression Coefficient Parameter Matrix in Multivariate Multiple RegressionDocument20 pagesEstimation Strategies For The Regression Coefficient Parameter Matrix in Multivariate Multiple RegressionRonaldo SantosNo ratings yet
- Sequential Quadratic Programming Methods: Abstract. in His 1963 PHD Thesis, Wilson Proposed The First Sequential QuadraticDocument78 pagesSequential Quadratic Programming Methods: Abstract. in His 1963 PHD Thesis, Wilson Proposed The First Sequential QuadraticHala HmedoshNo ratings yet
- Romijn 2008Document9 pagesRomijn 2008Victor PassosNo ratings yet
- SQ PreviewDocument63 pagesSQ PreviewAlneo LesagNo ratings yet
- A Sequential Quadratic Programming Algorithm With Non-Monotone Line SearchDocument24 pagesA Sequential Quadratic Programming Algorithm With Non-Monotone Line Searchgabao123No ratings yet
- Computers and Chemical Engineering: Jia Kang, Yankai Cao, Daniel P. Word, C.D. LairdDocument11 pagesComputers and Chemical Engineering: Jia Kang, Yankai Cao, Daniel P. Word, C.D. Lairdmaria buitragoNo ratings yet
- Translate - Varying Coefficient Models in Stata - v4Document40 pagesTranslate - Varying Coefficient Models in Stata - v4Arq. AcadêmicoNo ratings yet
- Optimization Method Based On Genetic AlgorithmsDocument16 pagesOptimization Method Based On Genetic Algorithmsdavidrajan0007No ratings yet
- Evaluation of Failure Probability Via Surrogate ModelsDocument15 pagesEvaluation of Failure Probability Via Surrogate ModelsFei NiNo ratings yet
- Minimum L - Distance Estimators For Non-Normalized Parametric ModelsDocument32 pagesMinimum L - Distance Estimators For Non-Normalized Parametric ModelsGaston GBNo ratings yet
- The Use of Genetic Algorithms in Finite Element Model IdentificationDocument8 pagesThe Use of Genetic Algorithms in Finite Element Model IdentificationMilena PopovicNo ratings yet
- Akaike 1974Document8 pagesAkaike 1974pereiraomarNo ratings yet
- A Fault Detection Approach Based On Machine Learning Models: (Legarza, RMM, Rramirez) @itesm - MXDocument2 pagesA Fault Detection Approach Based On Machine Learning Models: (Legarza, RMM, Rramirez) @itesm - MXsachinNo ratings yet
- Can We Make Genetic Algorithms Work in High-Dimensionality Problems?Document17 pagesCan We Make Genetic Algorithms Work in High-Dimensionality Problems?kilo929756No ratings yet
- ML Unit5Document14 pagesML Unit5aiswaryaNo ratings yet
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocument13 pagesAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNo ratings yet
- Uncertainty Assessment For Reconstructions Based On Deformable GeometryDocument7 pagesUncertainty Assessment For Reconstructions Based On Deformable GeometryLata DeshmukhNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Matrix Operations for Engineers and Scientists: An Essential Guide in Linear AlgebraFrom EverandMatrix Operations for Engineers and Scientists: An Essential Guide in Linear AlgebraNo ratings yet
- The Wavelet-Galerkin Method For Solving PDEs WithDocument9 pagesThe Wavelet-Galerkin Method For Solving PDEs WithJRNo ratings yet
- 05 Spectral Power Iterations For The Random Eigenvalue ProblemDocument13 pages05 Spectral Power Iterations For The Random Eigenvalue ProblemJRNo ratings yet
- Homework 6-A Radon-Nikodym Banquet: and Some Absolute Continuity, and MoreDocument3 pagesHomework 6-A Radon-Nikodym Banquet: and Some Absolute Continuity, and MoreJRNo ratings yet
- Isolated SingularitiesDocument7 pagesIsolated SingularitiesJRNo ratings yet
- HaarmeasureDocument357 pagesHaarmeasureJRNo ratings yet
- Analysis of Banach Spaces KobinDocument67 pagesAnalysis of Banach Spaces KobinJRNo ratings yet
- Quantifying SARS-CoV-2 Transmission Suggests Epidemic Control With Digital Contact TracingDocument9 pagesQuantifying SARS-CoV-2 Transmission Suggests Epidemic Control With Digital Contact TracingJRNo ratings yet
- Countable Sets and Separable Hilbert SpacesDocument17 pagesCountable Sets and Separable Hilbert SpacesJRNo ratings yet
- Banach Spaces of Continuous FunctionsDocument31 pagesBanach Spaces of Continuous FunctionsJRNo ratings yet
- Math 10 Lesson Plan 2Document2 pagesMath 10 Lesson Plan 2Red Zye Ubay100% (1)
- UntitledDocument23 pagesUntitledapi-262919996No ratings yet
- Bai Thi Mau Olympic Toan Tieng Anh Seamo Lop 9 10Document8 pagesBai Thi Mau Olympic Toan Tieng Anh Seamo Lop 9 10Diễm My 11a1100% (2)
- Name: Score: - Science 7Document4 pagesName: Score: - Science 7Jjr BacongcoNo ratings yet
- CambMATHS10 5.1-5.3 2ED Test 08DDocument8 pagesCambMATHS10 5.1-5.3 2ED Test 08Dwill.clark6No ratings yet
- Python ProgramsDocument7 pagesPython ProgramsSubbu SuniNo ratings yet
- Putnam PDFDocument15 pagesPutnam PDFAndrew Israel QNo ratings yet
- Methods of Substitution & ApplnDocument5 pagesMethods of Substitution & ApplnBoobalan RNo ratings yet
- MABA3 PermutationCombinationDocument24 pagesMABA3 PermutationCombinationHarper DooNo ratings yet
- Cambridge IGCSE™: Mathematics 0580/43 October/November 2022Document13 pagesCambridge IGCSE™: Mathematics 0580/43 October/November 2022Gehna SharmaNo ratings yet
- Mathematics KSSM Ylp Form 1 2019Document8 pagesMathematics KSSM Ylp Form 1 2019Uchiha MadaraNo ratings yet
- Class XII Mathematics Set-3 Time: 3 Hrs M.M: 100 MarksDocument5 pagesClass XII Mathematics Set-3 Time: 3 Hrs M.M: 100 MarksDivyansh WaghmareNo ratings yet
- Math Homework Grade 3Document8 pagesMath Homework Grade 3eltklmfng100% (1)
- Third Space Learning Exact Trig Values GCSE WorksheetDocument11 pagesThird Space Learning Exact Trig Values GCSE WorksheetXIAN JIANo ratings yet
- Tabla Transformadas PropiedadesDocument8 pagesTabla Transformadas PropiedadesYarith LopezNo ratings yet
- L13 Parallel AddersDocument11 pagesL13 Parallel AddersVishnu MaskarNo ratings yet
- Econometrics Books: Books On-Line Books / NotesDocument8 pagesEconometrics Books: Books On-Line Books / Notesaftab20100% (1)
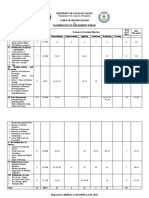
- University of Cagayan Valley: Tuguegarao City, Cagayan, PhilippinesDocument2 pagesUniversity of Cagayan Valley: Tuguegarao City, Cagayan, PhilippinesMichelle Malana100% (1)
- Ebook Machine Learning Control by Symbolic Regression 1St Edition Askhat Diveev Elizaveta Shmalko Online PDF All ChapterDocument56 pagesEbook Machine Learning Control by Symbolic Regression 1St Edition Askhat Diveev Elizaveta Shmalko Online PDF All Chapterluther.martin952100% (8)
- Mathematics Quadratic Equation MCQDocument7 pagesMathematics Quadratic Equation MCQAnonymous Mr7AWAnTrNo ratings yet
- Kevin Dalimunthe PBC NewDocument31 pagesKevin Dalimunthe PBC Newapi-295590351No ratings yet
- PM 1004 - 2018 - Notes - February 16thDocument8 pagesPM 1004 - 2018 - Notes - February 16thCHAMOD MADUSHANo ratings yet
- DerivativesDocument1 pageDerivativesGrace LamanoNo ratings yet
- Stochastic ProcessDocument1 pageStochastic ProcessROHIT NARAYANINo ratings yet
- Selection of Kriging Methods in Geostatistical Site InvestigationsDocument4 pagesSelection of Kriging Methods in Geostatistical Site InvestigationsJohnCarlosGilNo ratings yet
- Digital Logic Design (DLD) : Lecturer: Engr. Ali IqbalDocument18 pagesDigital Logic Design (DLD) : Lecturer: Engr. Ali Iqbal5682 AatqaNo ratings yet
- Combining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationDocument40 pagesCombining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationtrongndNo ratings yet
- Department of Mechanical Engineering The University of Texas at San Antonio (Utsa)Document8 pagesDepartment of Mechanical Engineering The University of Texas at San Antonio (Utsa)Harold DavalosNo ratings yet
- Scan Feb 9, 2021Document1 pageScan Feb 9, 2021Paulina TorresNo ratings yet