Download as pdf or txt
You might also like
- Solution Manual For An Introduction To Fluid Mecha B.qs. Z. MorrisonDocument1,057 pagesSolution Manual For An Introduction To Fluid Mecha B.qs. Z. MorrisonSaraNo ratings yet
- A Formalistic Analysis of The Short Story The Sounds of SundayDocument3 pagesA Formalistic Analysis of The Short Story The Sounds of Sundayeunkz_718567% (6)
- Product-Oriented Performance-Based AssessmentDocument8 pagesProduct-Oriented Performance-Based AssessmentIvan Santos100% (2)
- IEC 60417 2 1998 Graphical Symbols For Use On Equipment Part 2 Symbol OriginalsDocument590 pagesIEC 60417 2 1998 Graphical Symbols For Use On Equipment Part 2 Symbol OriginalsTu Duong100% (2)
- Fire Safety Full ReportDocument30 pagesFire Safety Full ReportNoor Asni100% (1)
- Cleanroom DoorsDocument11 pagesCleanroom DoorsUpendra SinghNo ratings yet
- Jove Research 111Document14 pagesJove Research 111Yhan SombilonNo ratings yet
- Automatic Visitor Counter and Light SwitchingDocument57 pagesAutomatic Visitor Counter and Light SwitchingLea Jean ConsigoNo ratings yet
- Manusa Door SystemDocument30 pagesManusa Door SystemBudi CahyonoNo ratings yet
- Mmscience - 2019 06 - Test of Doors Obstruction Detection SensorDocument5 pagesMmscience - 2019 06 - Test of Doors Obstruction Detection Sensorzbfidan74No ratings yet
- A Punt Es Puerta Elect RikDocument41 pagesA Punt Es Puerta Elect RikaperfectdevilNo ratings yet
- JETIREY06114Document7 pagesJETIREY06114nibishimirwe abelNo ratings yet
- 354940143Document17 pages354940143asma medjaouiNo ratings yet
- 70 125 1 PB1Document22 pages70 125 1 PB1Ibrahim RahimNo ratings yet
- Design and Construction of An Electronic Door Access Key: September 2018Document58 pagesDesign and Construction of An Electronic Door Access Key: September 2018mohammad ramdhanNo ratings yet
- Chapter One: Introduction: 1.0 BackgroundDocument42 pagesChapter One: Introduction: 1.0 BackgroundSulaiman Adebola BanireNo ratings yet
- A D A S D R L C S: Igital Utomatic Liding Oor With A OOM Ight Ontrol YstemDocument17 pagesA D A S D R L C S: Igital Utomatic Liding Oor With A OOM Ight Ontrol YstemStephen GomezNo ratings yet
- MTS-PX - InformacjeDocument2 pagesMTS-PX - InformacjeWiesiek RabczukNo ratings yet
- Design of PLC Control System For Automatic Door: Jiangshan Gao, Yan ZhiDocument6 pagesDesign of PLC Control System For Automatic Door: Jiangshan Gao, Yan ZhiVocal SamirNo ratings yet
- NFPA 101 Essentials Training Module 2Document6 pagesNFPA 101 Essentials Training Module 2Alejo SztybelNo ratings yet
- Brosur Hanshin Hs-5020Document4 pagesBrosur Hanshin Hs-5020Jimmy100% (1)
- 2021-11-25 Automation-of-a-Laundry-MachineDocument4 pages2021-11-25 Automation-of-a-Laundry-MachineDimitrios TriantafyllidisNo ratings yet
- Borewell Rescue Robot: V. Venmathi E. Poorniya S. SumathiDocument4 pagesBorewell Rescue Robot: V. Venmathi E. Poorniya S. SumathiganeshNo ratings yet
- v5n5p1 - Cisdiar JournalDocument15 pagesv5n5p1 - Cisdiar JournalKiet LeNo ratings yet
- Castell SwitchgearApplicationBookr3Document29 pagesCastell SwitchgearApplicationBookr3robertspiteri7No ratings yet
- Railway ProjectDocument35 pagesRailway ProjectsingamNo ratings yet
- Design of An Access Control Facial Recognition System Using Raspberry PiDocument5 pagesDesign of An Access Control Facial Recognition System Using Raspberry PiInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 10000006053ea Maintenance of Courier Xi Measurement CellDocument31 pages10000006053ea Maintenance of Courier Xi Measurement CellBryan Navarro Ojeda100% (1)
- Development of Electronic Time Lock Control For Security SystemDocument6 pagesDevelopment of Electronic Time Lock Control For Security SystemMichaelNo ratings yet
- Panjab University University Institute of Engineering &technologyDocument4 pagesPanjab University University Institute of Engineering &technologyHina VarshneyNo ratings yet
- Institute of Civil and Rural Engineering.: Department of Electronic & TelecommunicationDocument12 pagesInstitute of Civil and Rural Engineering.: Department of Electronic & TelecommunicationMayur SutarNo ratings yet
- Technical Specification (LG Rise) : ControlDocument6 pagesTechnical Specification (LG Rise) : ControlAntr HasanNo ratings yet
- Automatic Sliding Doors and ScreensDocument3 pagesAutomatic Sliding Doors and Screensbalram4uNo ratings yet
- Addis Ababa Science and Technology UniversityDocument35 pagesAddis Ababa Science and Technology UniversityJACKPOT LYNo ratings yet
- OWNIC Hospital Door CatalogueDocument22 pagesOWNIC Hospital Door CatalogueCipenk MindfreaksNo ratings yet
- Generic AIR ShowerDocument39 pagesGeneric AIR Showerhakim fastaNo ratings yet
- NIE INSTITUTE OF TECHNOLOGY AutomaticDocument16 pagesNIE INSTITUTE OF TECHNOLOGY AutomaticSuprithaNo ratings yet
- 16725-Hotel Electronic Access Control SystemDocument6 pages16725-Hotel Electronic Access Control SystemAhmad Sheikh AhmadNo ratings yet
- Report On A Touch Sensor Alarm Circuit Using A BreadboardDocument5 pagesReport On A Touch Sensor Alarm Circuit Using A BreadboardVicks TechnologyNo ratings yet
- Catalogue Nuve 20litre AutoclaveDocument2 pagesCatalogue Nuve 20litre Autoclavesidmed sidmedNo ratings yet
- MIC AssignmentDocument16 pagesMIC AssignmentMd. Ar-Rafi Bin Arif 190011123No ratings yet
- DT Electric Swing Operator PDFDocument7 pagesDT Electric Swing Operator PDFBetty Gloria PazNo ratings yet
- (IJETA-V2I4P7) :chaitanya RaneDocument6 pages(IJETA-V2I4P7) :chaitanya RaneIJETA - EighthSenseGroupNo ratings yet
- Manual de Instal A Tie ELLETRADocument33 pagesManual de Instal A Tie ELLETRADioszegi Arthur50% (2)
- Automatic Gate ControllerDocument38 pagesAutomatic Gate Controlleratta.rakeshNo ratings yet
- Automaticdooropener2022 ReportDocument29 pagesAutomaticdooropener2022 ReportAmeer Fiqri Bin Mohd Fakhrul AnuarNo ratings yet
- Door Access Control SystemDocument6 pagesDoor Access Control SystemChristian Esteban100% (1)
- Static Pass Box ControllerDocument16 pagesStatic Pass Box Controlleranandsuresh403No ratings yet
- Automated Door Lock System Using Arduino: AbstractDocument4 pagesAutomated Door Lock System Using Arduino: AbstractRayane BkrNo ratings yet
- Control System Design of Automatic Door Based On PLC: Yangyang Xu, Ying WangDocument4 pagesControl System Design of Automatic Door Based On PLC: Yangyang Xu, Ying WangNguyễn Lê Anh KhoaNo ratings yet
- PC Based Door Lock System Using BarcodeDocument25 pagesPC Based Door Lock System Using BarcodeYhael Tuazon67% (3)
- Report On Considerations For Dedicating The Smoke Ventilation Strategy To The Protection of The StairwellDocument4 pagesReport On Considerations For Dedicating The Smoke Ventilation Strategy To The Protection of The StairwellMaríaPaula CheheidNo ratings yet
- Door Locking SystemDocument19 pagesDoor Locking SystemChandra Mouli Reddy DasariNo ratings yet
- ISTR 10-1 (PVC Roll-Up Ventilation Door Instruction Manual)Document32 pagesISTR 10-1 (PVC Roll-Up Ventilation Door Instruction Manual)JuniorNo ratings yet
- BLE Curtains Catalogue 2010 (Email)Document16 pagesBLE Curtains Catalogue 2010 (Email)Branza GeorgeNo ratings yet
- Automatic Gate InteranceDocument39 pagesAutomatic Gate InteranceJossy Honey75% (4)
- Mini Project Final report-IIDocument15 pagesMini Project Final report-IIshubham raiNo ratings yet
- Project Title: Microcontroller Based Dam Door Opening SystemDocument57 pagesProject Title: Microcontroller Based Dam Door Opening SystemAnil ReddyNo ratings yet
- Articulo 7Document6 pagesArticulo 7roggerbcdNo ratings yet
- Upvc Wall PanalDocument13 pagesUpvc Wall PanalKalpana JeyarajNo ratings yet
- New Sensors and Processing ChainFrom EverandNew Sensors and Processing ChainJean-Hugh ThomasNo ratings yet
- Process Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationFrom EverandProcess Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationNo ratings yet
- Design of Powered Air Purifying Respirator Used For Healthcare Workers - RevisionDocument8 pagesDesign of Powered Air Purifying Respirator Used For Healthcare Workers - RevisionTu DuongNo ratings yet
- Design and Implementation of Upper Limb Rehabilitation Exoskeleton For Post-Stroke Patients - FullDocument6 pagesDesign and Implementation of Upper Limb Rehabilitation Exoskeleton For Post-Stroke Patients - FullTu DuongNo ratings yet
- Word Quick Parts PDFDocument3 pagesWord Quick Parts PDFTu DuongNo ratings yet
- Effectiveness Evaluation of Vacuum Pressure As Contributing Factor To Lightweight Seasoning Packets Distribution System - RevisionDocument7 pagesEffectiveness Evaluation of Vacuum Pressure As Contributing Factor To Lightweight Seasoning Packets Distribution System - RevisionTu DuongNo ratings yet
- Study On Designing of Coaxial BLDC Applied For Underwater Vehicle - RevisionDocument7 pagesStudy On Designing of Coaxial BLDC Applied For Underwater Vehicle - RevisionTu DuongNo ratings yet
- IEEE WorkShop Slides LavretskyDocument185 pagesIEEE WorkShop Slides LavretskyTu DuongNo ratings yet
- Eigenvalues: Matrices: Geometric InterpretationDocument8 pagesEigenvalues: Matrices: Geometric InterpretationTu DuongNo ratings yet
- DC Circuit 1Document12 pagesDC Circuit 1Tu DuongNo ratings yet
- DSCC2015-9724: Event-Triggered Adaptive ControlDocument6 pagesDSCC2015-9724: Event-Triggered Adaptive ControlTu DuongNo ratings yet
- Matrix Sign DecompositionDocument18 pagesMatrix Sign DecompositionTu DuongNo ratings yet
- Chapter 24: Alternating-Current Circuits: Max RmsDocument4 pagesChapter 24: Alternating-Current Circuits: Max RmsTu DuongNo ratings yet
- Stabilization of Nonlinear Systems Using Event-Triggered Output Feedback ControllersDocument6 pagesStabilization of Nonlinear Systems Using Event-Triggered Output Feedback ControllersTu DuongNo ratings yet
- DC Motor ExcerciseDocument11 pagesDC Motor ExcerciseTu DuongNo ratings yet
- 60617-3 1996Document24 pages60617-3 1996Fathi MusaNo ratings yet
- The Third Level NotesDocument28 pagesThe Third Level NotesRita MauryaNo ratings yet
- Full Download Test Bank For Health Psychology Biopsychosocial Interactions 9th Edition Edward P Sarafino Timothy W Smith PDF Full ChapterDocument36 pagesFull Download Test Bank For Health Psychology Biopsychosocial Interactions 9th Edition Edward P Sarafino Timothy W Smith PDF Full Chapterbiscuitunwist20bsg4100% (20)
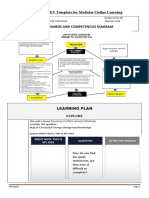
- 2021 JHS INSET Template For Modular/Online LearningDocument14 pages2021 JHS INSET Template For Modular/Online LearningMJ GuinacaranNo ratings yet
- How To Make Isometric Dimension and Text in AutoCADDocument5 pagesHow To Make Isometric Dimension and Text in AutoCADgia haiNo ratings yet
- High Performance Viscosity Modifying AgentDocument2 pagesHigh Performance Viscosity Modifying AgentGrv SrmNo ratings yet
- Progress Test 9: Cause or Have in The Correct FormDocument3 pagesProgress Test 9: Cause or Have in The Correct FormYoncé Ivy KnowlesNo ratings yet
- Biology 1 - Cell-Basic Unit of LifeDocument22 pagesBiology 1 - Cell-Basic Unit of LifeAryan MendozaNo ratings yet
- Pengaruh Lingkungan Dan Stress Kerja Terhadap Produktivitas Kerja Karyawan PT Panasonic Gobel Life Solutions Manufacturing IndonesiaDocument13 pagesPengaruh Lingkungan Dan Stress Kerja Terhadap Produktivitas Kerja Karyawan PT Panasonic Gobel Life Solutions Manufacturing Indonesiaachmad fauzi romadonNo ratings yet
- 1.JMX-XXX-XX-CAL-001-00 Rev.B1Document18 pages1.JMX-XXX-XX-CAL-001-00 Rev.B1Farid Ferdiansyah Tambunan0% (1)
- Gods Omnipresence in The World On Possible MeaninDocument20 pagesGods Omnipresence in The World On Possible MeaninJoan Amanci Casas MuñozNo ratings yet
- Jamal. Collaboration TheoryDocument19 pagesJamal. Collaboration TheoryDiego Uliano RochaNo ratings yet
- Grade 11 IphpDocument2 pagesGrade 11 IphpArnel Francisco TorreonNo ratings yet
- Axel Dorian PIEPI TOKO, Msc. in Geophysics and Geo-ExplorationDocument3 pagesAxel Dorian PIEPI TOKO, Msc. in Geophysics and Geo-ExplorationGrace DouallaNo ratings yet
- Unit 1 FMM Session 1Document31 pagesUnit 1 FMM Session 1Palanivel Rajan A RNo ratings yet
- Assessment and Analysis of Historical Sources: Gec2A - Readings in The Philippine History With IpedDocument31 pagesAssessment and Analysis of Historical Sources: Gec2A - Readings in The Philippine History With IpedMikaella Marie MontefalconNo ratings yet
- ACM - Ds Standard Field Machine v2.0.4Document4 pagesACM - Ds Standard Field Machine v2.0.4s pradhanNo ratings yet
- Conventional Tunnelling - 5.draft - 20041004Document98 pagesConventional Tunnelling - 5.draft - 20041004Aishwarya KumarNo ratings yet
- 03 Main Features of MoralityDocument41 pages03 Main Features of MoralityPHILIP JOHN CORDOVANo ratings yet
- Guide On PE TopicsDocument3 pagesGuide On PE TopicsXyrell Jane MarquezNo ratings yet
- The Compassionate Mind - Association For Psychological ScienceDocument5 pagesThe Compassionate Mind - Association For Psychological ScienceLTenzinNo ratings yet
- LP Phy Sci Q2-M3 (W1)Document3 pagesLP Phy Sci Q2-M3 (W1)MARIA DINA TAYACTACNo ratings yet
- Hershey & Chase WorksheetDocument1 pageHershey & Chase WorksheetlpaetznickNo ratings yet
- Narrative Report On SlacDocument2 pagesNarrative Report On SlacFatima Ybanez Mahilum-LimbagaNo ratings yet
- Evaluation Report - FM vs. HLVR AI - Gordon NDocument8 pagesEvaluation Report - FM vs. HLVR AI - Gordon NSunnyNo ratings yet
- Guide To Meeting Basic Needs: Inmate Behavior ManagementDocument77 pagesGuide To Meeting Basic Needs: Inmate Behavior ManagementAtharva PrasadNo ratings yet
- MathsClass XII - SET-1Document8 pagesMathsClass XII - SET-1vijendrasingh2163No ratings yet
- CS490 Advanced Topics in Computing (Deep Learning)Document37 pagesCS490 Advanced Topics in Computing (Deep Learning)Afaq AhmedNo ratings yet