Download as pdf or txt
You might also like
- FPSO-Design-to-Minimize-Operational-Downtime Refer For Limiting Conditions in Operations PDFDocument15 pagesFPSO-Design-to-Minimize-Operational-Downtime Refer For Limiting Conditions in Operations PDFRini MathewNo ratings yet
- Vessel Generated WavesDocument92 pagesVessel Generated WavesKc TanNo ratings yet
- NATO STANAG 3609 5thed - Maint FuelDocument32 pagesNATO STANAG 3609 5thed - Maint FuelMiguel Gomez0% (1)
- Cathodic Protection Offshore GN Dec18Document46 pagesCathodic Protection Offshore GN Dec18RENCE0% (1)
- First Two Pages of Luom4y18Document2 pagesFirst Two Pages of Luom4y18api-98783757No ratings yet
- What Do You Do With An Obsolete Oil Rig?Document2 pagesWhat Do You Do With An Obsolete Oil Rig?Dennis LingNo ratings yet
- Pertemuan X Penanganan Proses Berlabuh JangkarDocument24 pagesPertemuan X Penanganan Proses Berlabuh JangkarRani TribuanaNo ratings yet
- Resistance, Propulsion and Manoeuvrability: Fishing Vessel Technology 20Th Graduate School Module 1.-Ship DesignDocument27 pagesResistance, Propulsion and Manoeuvrability: Fishing Vessel Technology 20Th Graduate School Module 1.-Ship DesignJuan SilvaNo ratings yet
- M 2 Infrastruktur Needs AssessmentDocument24 pagesM 2 Infrastruktur Needs AssessmentuyoNo ratings yet
- Reliability and Availability Assessment of Seabed Storage Tanks UsingDocument14 pagesReliability and Availability Assessment of Seabed Storage Tanks UsingNúbia Caroline de AlmeidaNo ratings yet
- 4 - Capt. BalrajDocument33 pages4 - Capt. BalrajYudi DarmawanNo ratings yet
- Marina Design To Incorporate Superyachts - A Case Study: January 2007Document6 pagesMarina Design To Incorporate Superyachts - A Case Study: January 2007SHASHWAT GUPTANo ratings yet
- AnchoringDocument8 pagesAnchoringDnv BaileyNo ratings yet
- Ballast Water: Prospects For Marine Diesel Engine Emission ControlDocument28 pagesBallast Water: Prospects For Marine Diesel Engine Emission Controlugik arfiandiNo ratings yet
- Private Ones Or: A Paper For Presentation at The January 21., and Marine EngineersDocument49 pagesPrivate Ones Or: A Paper For Presentation at The January 21., and Marine EngineersDina ANDRIAMAHEFAHERYNo ratings yet
- Codes - Standard Club - Anchoring ProceduresDocument8 pagesCodes - Standard Club - Anchoring ProceduresSetiadi MargonoNo ratings yet
- Feasibility Offshore Coal-Fired Electrical Power GenerationDocument5 pagesFeasibility Offshore Coal-Fired Electrical Power GenerationAriNo ratings yet
- Koelbel - Boat Design Reflected - 1999Document3 pagesKoelbel - Boat Design Reflected - 1999CostinRotaruNo ratings yet
- One PetroDocument21 pagesOne PetroBagus PanuntunNo ratings yet
- OTC-25165-MS Impact On Risers and Flowlines Design of The FPSO Mooring in Deepwater and Ultra DeepwaterDocument10 pagesOTC-25165-MS Impact On Risers and Flowlines Design of The FPSO Mooring in Deepwater and Ultra Deepwaterthlim19078656No ratings yet
- MSC Circ 1143Document6 pagesMSC Circ 1143cahyo putroNo ratings yet
- Loch Eriboll Preliminary StudyDocument49 pagesLoch Eriboll Preliminary Studyapi-228531882No ratings yet
- A Fishing Industry Guide To Offshore Operators: Fisheries and Offshore Oil Consultative GroupDocument34 pagesA Fishing Industry Guide To Offshore Operators: Fisheries and Offshore Oil Consultative GroupJOSE RAMONNo ratings yet
- Proper HandlingDocument5 pagesProper HandlingvindjoNo ratings yet
- Ijsct 85Document16 pagesIjsct 85Mar MotaNo ratings yet
- Balast Water ManagementDocument16 pagesBalast Water ManagementDomingo RenatoNo ratings yet
- Design of Marina Structures and Facilities PDFDocument23 pagesDesign of Marina Structures and Facilities PDFAleksa CavicNo ratings yet
- OTC13999 Development For A Deep Sea FPSO Suitable For The GoMDocument8 pagesOTC13999 Development For A Deep Sea FPSO Suitable For The GoMAnil ChananaNo ratings yet
- Oil and Gas Offshore ProductionDocument9 pagesOil and Gas Offshore ProductionLao ZhuNo ratings yet
- The Selection of Appropriate Burial Tools and Burial DepthsDocument8 pagesThe Selection of Appropriate Burial Tools and Burial Depthsschpiplik100% (1)
- Pen CultureDocument8 pagesPen CultureBhupesh KumarNo ratings yet
- Study Material For Ballast Water ManagementDocument12 pagesStudy Material For Ballast Water ManagementPrabodh GautamNo ratings yet
- Steel Hatch CoversDocument20 pagesSteel Hatch CoversRizal Rachman100% (1)
- 2017 12 Anchoring and Anchoring EquipmentDocument6 pages2017 12 Anchoring and Anchoring EquipmentAndreea DiaconuNo ratings yet
- Abet FinalDocument59 pagesAbet Finalsayuri0410No ratings yet
- Industry Passage Plan Pilot BoardingDocument24 pagesIndustry Passage Plan Pilot Boardingnikoskarandinos100% (3)
- Fish Passage: Oregon Conservation Practice Job Sheet 396Document10 pagesFish Passage: Oregon Conservation Practice Job Sheet 396alang_businessNo ratings yet
- The Kiteship ProjectDocument4 pagesThe Kiteship Projectpramod1989No ratings yet
- FlexiportDocument16 pagesFlexiportThinkDefenceNo ratings yet
- Characterization of Fishing GearDocument8 pagesCharacterization of Fishing GearFransis ChangomaNo ratings yet
- Fish SafeDocument4 pagesFish SafeengineershoaibqaziNo ratings yet
- Mooring (Watercraft) : Not To Be Confused WithDocument19 pagesMooring (Watercraft) : Not To Be Confused WithDODDI PRASADNo ratings yet
- FPSODocument18 pagesFPSOCarly Rheman100% (3)
- Flow Through MethodDocument2 pagesFlow Through Methodpapaki2No ratings yet
- The Floating Production, Storage and Offloading Vessel Design For Oil Field Development in Harsh Marine EnvironmentDocument6 pagesThe Floating Production, Storage and Offloading Vessel Design For Oil Field Development in Harsh Marine Environmentthlim19078656No ratings yet
- WoodenPlywoodBoats D.J.Eyres-1975Document11 pagesWoodenPlywoodBoats D.J.Eyres-1975olim owletNo ratings yet
- Aquaculture in RacewaysDocument12 pagesAquaculture in RacewaysJethroBornilla100% (2)
- FAO Small VSL StabilityDocument64 pagesFAO Small VSL StabilityWidiyawatiNo ratings yet
- Fixed Bottom Platforms: Jacket:: Types of PlatformDocument4 pagesFixed Bottom Platforms: Jacket:: Types of PlatformParthiban BalasubramaniamNo ratings yet
- Ballast Water Treatment Methods: Fact Sheet 7Document2 pagesBallast Water Treatment Methods: Fact Sheet 7Popa Victor-IonuțNo ratings yet
- Ship Resistance CalculationDocument11 pagesShip Resistance CalculationBhagatsinh Geda100% (4)
- Trapping For VNCDocument2 pagesTrapping For VNCAbhi BlackNo ratings yet
- Correct Location of Port Structures, Elevation of WaterDocument19 pagesCorrect Location of Port Structures, Elevation of Waterjoy tolibasNo ratings yet
- Small Fishing Boats DesignsDocument47 pagesSmall Fishing Boats DesignsMSavic100% (2)
- Corrosion Control - Offshore PlatformsDocument6 pagesCorrosion Control - Offshore PlatformsfadjarsuryanaNo ratings yet
- Vego - SSKs and Shallow Water ASWDocument7 pagesVego - SSKs and Shallow Water ASWDMNo ratings yet
- LP News: Guidelines For Lay-Up of ShipsDocument8 pagesLP News: Guidelines For Lay-Up of ShipsRajesh Kumar PandeyNo ratings yet
- Mantenimiento BuquesDocument27 pagesMantenimiento BuquesPedro Orlando Giurfa Morales100% (1)
- Week 2Document42 pagesWeek 2Fevee Joy BalberonaNo ratings yet
- Practical Boat-Sailing A Concise and Simple TreatiseFrom EverandPractical Boat-Sailing A Concise and Simple TreatiseRating: 3 out of 5 stars3/5 (1)
- A Sailing Guide to the Solent and Poole Harbour - With Practical Hints as to Living and Cooking on and Working a Small YachtFrom EverandA Sailing Guide to the Solent and Poole Harbour - With Practical Hints as to Living and Cooking on and Working a Small YachtNo ratings yet
- Nautical Flags - A Collection of Historical Sailing Articles on the Use and Recognition of FlagsFrom EverandNautical Flags - A Collection of Historical Sailing Articles on the Use and Recognition of FlagsNo ratings yet
- Wu 2016Document6 pagesWu 2016Soledad AceitunoNo ratings yet
- Huang 1993Document8 pagesHuang 1993Soledad AceitunoNo ratings yet
- Driscoll 2000Document14 pagesDriscoll 2000Soledad AceitunoNo ratings yet
- Chen 2021 J. Phys. Conf. Ser. 1995 012029Document8 pagesChen 2021 J. Phys. Conf. Ser. 1995 012029Soledad AceitunoNo ratings yet
- Calculo Fuerza BuenoDocument6 pagesCalculo Fuerza BuenoSoledad AceitunoNo ratings yet
- Omae2011 49Document9 pagesOmae2011 49Soledad AceitunoNo ratings yet
- Challenges and Emerging Technical Solutions in On-Growing Salmon FarmingDocument10 pagesChallenges and Emerging Technical Solutions in On-Growing Salmon FarmingSoledad AceitunoNo ratings yet
- Mooring Design Selection of Aquaculture Cage For Indonesian OceanDocument13 pagesMooring Design Selection of Aquaculture Cage For Indonesian OceanSoledad AceitunoNo ratings yet
- Indicators and Trends: Monitoring Climate Change AdaptationDocument8 pagesIndicators and Trends: Monitoring Climate Change AdaptationSoledad AceitunoNo ratings yet
- Tilt Current Meter Array: Field ValidationDocument5 pagesTilt Current Meter Array: Field ValidationSoledad AceitunoNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2013/0239649 A1Document25 pagesPatent Application Publication (10) Pub. No.: US 2013/0239649 A1Soledad AceitunoNo ratings yet
- 1 s2.0 S0029801820300123 MainDocument22 pages1 s2.0 S0029801820300123 MainSoledad AceitunoNo ratings yet
- Global Salmon Networks: Unpacking Ecological Contradictions at The Production StageDocument21 pagesGlobal Salmon Networks: Unpacking Ecological Contradictions at The Production StageSoledad AceitunoNo ratings yet
- OTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinDocument8 pagesOTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinSoledad AceitunoNo ratings yet
- TCM-4 Tilt Current Meter: Product Data SheetDocument2 pagesTCM-4 Tilt Current Meter: Product Data SheetSoledad AceitunoNo ratings yet
- A Solid State Tilt Meter For Current Meter Attitude DeterminationDocument4 pagesA Solid State Tilt Meter For Current Meter Attitude DeterminationSoledad AceitunoNo ratings yet
- Fatiga Lineas FondeoDocument23 pagesFatiga Lineas FondeoSoledad AceitunoNo ratings yet
- Omae 2010-20190Document7 pagesOmae 2010-20190Soledad AceitunoNo ratings yet
- Fatigue Analysis of Mooring System For Net Cage Under Random LoadsDocument10 pagesFatigue Analysis of Mooring System For Net Cage Under Random LoadsSoledad AceitunoNo ratings yet
- Ships and Offshore StructuresDocument12 pagesShips and Offshore StructuresSoledad AceitunoNo ratings yet
- Ngina Et AlDocument8 pagesNgina Et AlSoledad AceitunoNo ratings yet
- Mooring Chain Climbing Robot For NDT Inspection ApplicationsDocument9 pagesMooring Chain Climbing Robot For NDT Inspection ApplicationsSoledad AceitunoNo ratings yet
- The Force Exerted by Surf Ace Waves On PilesDocument6 pagesThe Force Exerted by Surf Ace Waves On PilesSoledad AceitunoNo ratings yet
- Simple Model of Dissolved Oxygen Consumption in A Bay Within High Organic Loading: An Applied Remediation ToolDocument15 pagesSimple Model of Dissolved Oxygen Consumption in A Bay Within High Organic Loading: An Applied Remediation ToolSoledad AceitunoNo ratings yet
- Oxygen Monitoring and Injection in Salmon CagesDocument18 pagesOxygen Monitoring and Injection in Salmon CagesSoledad AceitunoNo ratings yet
- Water-Entry and - Exit of A Horizontal Circular CylinderDocument8 pagesWater-Entry and - Exit of A Horizontal Circular CylinderSoledad AceitunoNo ratings yet
- A Newly Developed Oxygen Injection System For Cage FarmsDocument7 pagesA Newly Developed Oxygen Injection System For Cage FarmsSoledad AceitunoNo ratings yet
- Cromey2002 DepomodDocument29 pagesCromey2002 DepomodSoledad Aceituno100% (1)
- Volume Loss of An Aquaculture Net Pen Due To Current Speed and Linear Weight of Sinker RingDocument7 pagesVolume Loss of An Aquaculture Net Pen Due To Current Speed and Linear Weight of Sinker RingSoledad AceitunoNo ratings yet
- Navigation Vector Based Ship Manoeuvring PredictionDocument31 pagesNavigation Vector Based Ship Manoeuvring PredictionSoledad AceitunoNo ratings yet
- 2.1 SMCPDocument19 pages2.1 SMCPAbcdNo ratings yet
- Marine Structure: SBEQ 3173 Civil Engineering ConstructionDocument137 pagesMarine Structure: SBEQ 3173 Civil Engineering ConstructionBernard Ting Yiew SingNo ratings yet
- Ports of ChileDocument52 pagesPorts of ChileKarem Lastarria Monardes100% (1)
- Harbour MaterialDocument62 pagesHarbour MaterialBalaji vNo ratings yet
- Navigate Vessel Safetly at The Chittagong Port Bangladesh AnchorageDocument5 pagesNavigate Vessel Safetly at The Chittagong Port Bangladesh AnchorageEmir EnginNo ratings yet
- Seamanship PDFDocument795 pagesSeamanship PDFashwanidhiman5023No ratings yet
- Profile: LebanonDocument42 pagesProfile: LebanonMuthana JalladNo ratings yet
- Imcasf 14 20 PDFDocument6 pagesImcasf 14 20 PDFsameer hiiNo ratings yet
- HX1 Horizontal Windlass Iss 2Document24 pagesHX1 Horizontal Windlass Iss 2edgar luisNo ratings yet
- F1 - Maneuvering, Ship Handling, National Emergencies and COLREGSDocument43 pagesF1 - Maneuvering, Ship Handling, National Emergencies and COLREGSGlydiel100% (1)
- OMAE2008-57 895: The Design and Implementation of Fpso Mooring Management SystemDocument5 pagesOMAE2008-57 895: The Design and Implementation of Fpso Mooring Management SystemRaphael Owusu kyerematengNo ratings yet
- DanPilot Pilotage Pre-Planning GuideDocument88 pagesDanPilot Pilotage Pre-Planning GuideokandandinNo ratings yet
- WG 212 MVT of ShipsDocument2 pagesWG 212 MVT of ShipsMaria XNo ratings yet
- Fish CaptureDocument40 pagesFish CaptureFlorenz Shemil BesaNo ratings yet
- II (A) PROCEDURAL MANUAL - MU Rev.01Document2 pagesII (A) PROCEDURAL MANUAL - MU Rev.01Marj ApolinarNo ratings yet
- Summary of Cost Estimation For 10 Ton Bollard Pull Tug Boat: No. Description Quantity Unit Hull Unit Price (BDT)Document26 pagesSummary of Cost Estimation For 10 Ton Bollard Pull Tug Boat: No. Description Quantity Unit Hull Unit Price (BDT)Masum MahdyNo ratings yet
- Mooring Ropes 22-03 Document1Document2 pagesMooring Ropes 22-03 Document1Cesar RodriguezNo ratings yet
- FUKUSHIMA Hydraulic Deck MachineryDocument26 pagesFUKUSHIMA Hydraulic Deck MachinerypcatruongNo ratings yet
- Sanmar Serenade Vessel DetailsDocument11 pagesSanmar Serenade Vessel DetailsChris MendosaNo ratings yet
- The Hazards of Snap Back Initial Learnings From A Serious Incident of Mooring Line FailureDocument10 pagesThe Hazards of Snap Back Initial Learnings From A Serious Incident of Mooring Line FailureViktor BesedaNo ratings yet
- MIN 649 Amendment 1 - Code of Safe Working Practices For Merchant Seafarers Amendment 5 2020Document5 pagesMIN 649 Amendment 1 - Code of Safe Working Practices For Merchant Seafarers Amendment 5 2020Sezai GorguNo ratings yet
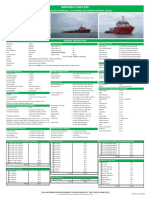
- ARMADA TUAH 105 - Brief Tech Spec (8-Apr-2019)Document2 pagesARMADA TUAH 105 - Brief Tech Spec (8-Apr-2019)Claudio SantellanesNo ratings yet
- 01 Common Rules General InformationDocument128 pages01 Common Rules General InformationMV-Tamimi 6 VesselNo ratings yet
- SMS W 1013 Instructions For Braking Capacity Test of Mooring WinchDocument2 pagesSMS W 1013 Instructions For Braking Capacity Test of Mooring Winchyandong liNo ratings yet
- Buckeye Port Reading Marine Terminal GuideDocument40 pagesBuckeye Port Reading Marine Terminal GuidevijayarchNo ratings yet
- 14.1.1 Risk Assessment: PurposeDocument3 pages14.1.1 Risk Assessment: PurposeSaurabh Yadav100% (1)
- Spread Moorings Functions Analysis of by Dimensionless: B Half Am Ic N IningDocument12 pagesSpread Moorings Functions Analysis of by Dimensionless: B Half Am Ic N IningcmkohNo ratings yet
- Historical Development of Iron Screw Pile FoundationsDocument21 pagesHistorical Development of Iron Screw Pile FoundationsLaurentiu irimiaNo ratings yet