Download as pdf or txt
You might also like
- MCQ OrthoDocument45 pagesMCQ OrthodentistsurorNo ratings yet
- 2M Rotating Spears: Service ManualDocument18 pages2M Rotating Spears: Service Manualfaris100% (1)
- US Army Mechanic Metal Auto Body RepairDocument108 pagesUS Army Mechanic Metal Auto Body RepairSpace_Hulker100% (2)
- GE Jenbacher Standard Technical SpecificationsDocument19 pagesGE Jenbacher Standard Technical SpecificationsSerg MarushkoNo ratings yet
- The Radiation Code: Unified Model Documentation Paper 023Document50 pagesThe Radiation Code: Unified Model Documentation Paper 023Reno ChoiNo ratings yet
- Code - Aster: Elements With Internal Discontinuity, Behavior CZM - EXP and Piloting of The LoadingDocument23 pagesCode - Aster: Elements With Internal Discontinuity, Behavior CZM - EXP and Piloting of The LoadingMilaniStefanoNo ratings yet
- Code - Aster: Law of Behavior ENDO - ORTH - BETONDocument44 pagesCode - Aster: Law of Behavior ENDO - ORTH - BETONMilaniStefanoNo ratings yet
- Code AsterDocument12 pagesCode Asterfabvn01_125620890No ratings yet
- Code - Aster: Operators Affe - Char - Meca Affe - Char - Meca - C Affe - Char - Meca - FDocument67 pagesCode - Aster: Operators Affe - Char - Meca Affe - Char - Meca - C Affe - Char - Meca - FStefano MilaniNo ratings yet
- Code - Aster: Models of Behavior THHMDocument60 pagesCode - Aster: Models of Behavior THHMMilaniStefanoNo ratings yet
- Code - Aster: General Information On The Combined Gradient: GCPC Aster and Use of PetscDocument42 pagesCode - Aster: General Information On The Combined Gradient: GCPC Aster and Use of PetscStefano MilaniNo ratings yet
- Code Aster User ManuelDocument14 pagesCode Aster User ManuelCostynhaNo ratings yet
- Code - Aster: Resolution of Nonregular Systems by A Method of Decomposition in Singular ValuesDocument22 pagesCode - Aster: Resolution of Nonregular Systems by A Method of Decomposition in Singular ValuesStefano MilaniNo ratings yet
- CodeAster With Mazar ModelDocument16 pagesCodeAster With Mazar ModelPabloNo ratings yet
- Code - Aster: General Information On The Direct Linear Solveurs and Use of MUMPSDocument44 pagesCode - Aster: General Information On The Direct Linear Solveurs and Use of MUMPSStefano MilaniNo ratings yet
- Seam3d BtexDocument17 pagesSeam3d BtexAbdelhay ElomariNo ratings yet
- django-rest-framework-simplejwt-readthedocs-io-en-latest (1)Document36 pagesdjango-rest-framework-simplejwt-readthedocs-io-en-latest (1)saadiqahNo ratings yet
- 00_TES_SD_009.01 Standard Technical Specifications (TSE)Document1,378 pages00_TES_SD_009.01 Standard Technical Specifications (TSE)Ragavendra VaradarajanNo ratings yet
- Code - Aster: Operator DEFI - MATERIAUDocument207 pagesCode - Aster: Operator DEFI - MATERIAUtikktak990No ratings yet
- Aave v2 WhitepaperDocument14 pagesAave v2 Whitepaperalexander benNo ratings yet
- Code - Aster: Multiaxial Criteria of Starting in FatigueDocument44 pagesCode - Aster: Multiaxial Criteria of Starting in FatigueYoyoNo ratings yet
- SALOME 8 3 0 Release NotesDocument27 pagesSALOME 8 3 0 Release Notestarun_iiitdmNo ratings yet
- SALOME 8 2 0 Release NotesDocument23 pagesSALOME 8 2 0 Release NotesefcarrionNo ratings yet
- OMS-Stand C Programming RulesDocument58 pagesOMS-Stand C Programming RuleskleinfransNo ratings yet
- R P RP O501 E W P S: Ecommended RacticeDocument43 pagesR P RP O501 E W P S: Ecommended RacticepaulortsNo ratings yet
- Swash TechDocument77 pagesSwash Techbowon43533No ratings yet
- Code - Aster: How To Dig A Tunnel: Methodology of ExcavationDocument26 pagesCode - Aster: How To Dig A Tunnel: Methodology of ExcavationLuca BrandiNo ratings yet
- ATE N 553 81.09 (En)Document11 pagesATE N 553 81.09 (En)Miguel QueirosNo ratings yet
- Code - Aster: Extended Finite Method Element: General InformationDocument99 pagesCode - Aster: Extended Finite Method Element: General InformationMilaniStefanoNo ratings yet
- Predicting Flow Dynamics of An Entire Engine Cooling System Using 3D CFDDocument66 pagesPredicting Flow Dynamics of An Entire Engine Cooling System Using 3D CFDsrinathgurunathNo ratings yet
- JBoss Enterprise Application Platform-5-Performance Tuning Guide-En-USDocument75 pagesJBoss Enterprise Application Platform-5-Performance Tuning Guide-En-USvali07No ratings yet
- Thesis - Report .Nithin - SubhashDocument67 pagesThesis - Report .Nithin - SubhashAhmed MostafaNo ratings yet
- Easy Barrier - Use and Maintenance - ENDocument66 pagesEasy Barrier - Use and Maintenance - ENRogelio ValdezNo ratings yet
- Leopard General and in Stal Tion InformationDocument18 pagesLeopard General and in Stal Tion InformationChandrasekhar SonarNo ratings yet
- Code - Aster: Operator CREA - CHAMPDocument23 pagesCode - Aster: Operator CREA - CHAMPMilaniStefanoNo ratings yet
- r7 04 05Document11 pagesr7 04 05Myron OikonomakisNo ratings yet
- Code - Aster: Operator STAT - NON - LINEDocument48 pagesCode - Aster: Operator STAT - NON - LINESimon WunschNo ratings yet
- Code - Aster: Note of Use of The Elements DiscreteDocument22 pagesCode - Aster: Note of Use of The Elements DiscreteAishwarya PrabhakaranNo ratings yet
- Truck DiferensialDocument102 pagesTruck DiferensialRadithya RafeeNo ratings yet
- DMOS Dual Full Bridge Driver: ApplicationsDocument29 pagesDMOS Dual Full Bridge Driver: ApplicationssekoNo ratings yet
- Operating InstructionsDocument56 pagesOperating InstructionsJOHANNA DANIELENo ratings yet
- PDFDocument158 pagesPDFJulian Andres Toro EscobarNo ratings yet
- Edgebanding: Enclosure: User ManualDocument166 pagesEdgebanding: Enclosure: User ManualHUY HOANG100% (1)
- Code - Aster: Operators Affe - Char - Meca Affe - Char - Meca - C Affe - Char - Meca - FDocument67 pagesCode - Aster: Operators Affe - Char - Meca Affe - Char - Meca - C Affe - Char - Meca - FMilaniStefanoNo ratings yet
- Code - Aster: FDLV111 - Absorption of A Wave of Pressure in A Fluid ColumnDocument10 pagesCode - Aster: FDLV111 - Absorption of A Wave of Pressure in A Fluid ColumnStefano MilaniNo ratings yet
- Code - Aster: Procedure CALC - TABLEDocument13 pagesCode - Aster: Procedure CALC - TABLEStefano MilaniNo ratings yet
- D-Waves User ManualDocument140 pagesD-Waves User Manualalfredo liraNo ratings yet
- FEMWATER - Flow Model: Gms 7.0 TutorialsDocument17 pagesFEMWATER - Flow Model: Gms 7.0 TutorialsAbdelhay ElomariNo ratings yet
- PearlExpertTitan Man v1Document102 pagesPearlExpertTitan Man v1fixapo1625No ratings yet
- 2020-15 Chintalapudi Adithya Reddy & Manikanta VenkateshDocument84 pages2020-15 Chintalapudi Adithya Reddy & Manikanta Venkateshpad abtNo ratings yet
- DI570 ManualDocument64 pagesDI570 Manualngoctuyen,ktNo ratings yet
- Digital Servo Amplifier Servo Star 601... 620: Assembly, Installation, SetupDocument100 pagesDigital Servo Amplifier Servo Star 601... 620: Assembly, Installation, SetupPaul RidgeNo ratings yet
- Res 2 Dinvx 64Document145 pagesRes 2 Dinvx 64Cesar VeraNo ratings yet
- Diss Afonso MoreiraDocument111 pagesDiss Afonso MoreiraprakashNo ratings yet
- A FEM Alghorithm in OctaveDocument39 pagesA FEM Alghorithm in OctaveLuis GibbsNo ratings yet
- E220-Series User-Manual v2.2.0Document260 pagesE220-Series User-Manual v2.2.0QuânNo ratings yet
- SBXPC OCX Reference Manual v3.12 - NeutralDocument50 pagesSBXPC OCX Reference Manual v3.12 - Neutralferittandogan100% (1)
- Deep Sea Electronics PLC: MODEL 521 Remote Start Engine Management SystemDocument19 pagesDeep Sea Electronics PLC: MODEL 521 Remote Start Engine Management SystemAhmed ChanaouiNo ratings yet
- The Openacc™ Application Programming Interface: June, 2013Document74 pagesThe Openacc™ Application Programming Interface: June, 2013xuhaffgNo ratings yet
- User GuideDocument253 pagesUser GuideUma SinghNo ratings yet
- SDH / SONET Explained in Functional Models: Modeling the Optical Transport NetworkFrom EverandSDH / SONET Explained in Functional Models: Modeling the Optical Transport NetworkNo ratings yet
- Space/Terrestrial Mobile Networks: Internet Access and QoS SupportFrom EverandSpace/Terrestrial Mobile Networks: Internet Access and QoS SupportNo ratings yet
- DTMB 1961 1531Document38 pagesDTMB 1961 1531MilaniStefanoNo ratings yet
- Code - Aster: Operator CREA - ELEM - SSDDocument6 pagesCode - Aster: Operator CREA - ELEM - SSDMilaniStefanoNo ratings yet
- Insulon Vacuum Jacketed Hose Catalog Concept Group LLC July 2023 WebDocument13 pagesInsulon Vacuum Jacketed Hose Catalog Concept Group LLC July 2023 WebMilaniStefanoNo ratings yet
- Code - Aster: Operator ASSE - MAILLAGEDocument4 pagesCode - Aster: Operator ASSE - MAILLAGEMilaniStefanoNo ratings yet
- Code - Aster: Operator CALC - BTDocument10 pagesCode - Aster: Operator CALC - BTMilaniStefanoNo ratings yet
- Code - Aster: ZZZZ259 - Adaptation of Grid and Follow-Up of Borders 2DDocument10 pagesCode - Aster: ZZZZ259 - Adaptation of Grid and Follow-Up of Borders 2DMilaniStefanoNo ratings yet
- Code - Aster: SZLZ103 - Method RAINFLOWDocument4 pagesCode - Aster: SZLZ103 - Method RAINFLOWMilaniStefanoNo ratings yet
- Code - Aster: Operator ASSE - VECTEURDocument2 pagesCode - Aster: Operator ASSE - VECTEURMilaniStefanoNo ratings yet
- Code - Aster: Operator ASSE - MATRICEDocument4 pagesCode - Aster: Operator ASSE - MATRICEMilaniStefanoNo ratings yet
- Code - Aster: Operator DEFI - COMPOSITEDocument4 pagesCode - Aster: Operator DEFI - COMPOSITEMilaniStefanoNo ratings yet
- Code - Aster: Simplified Analysis of Harmfulness of Defect by The Method K-BetaDocument17 pagesCode - Aster: Simplified Analysis of Harmfulness of Defect by The Method K-BetaMilaniStefanoNo ratings yet
- Code - Aster: Operator DEFI - COMPORDocument8 pagesCode - Aster: Operator DEFI - COMPORMilaniStefanoNo ratings yet
- Code - Aster: Elements With Internal Discontinuity, Behavior CZM - EXP and Piloting of The LoadingDocument23 pagesCode - Aster: Elements With Internal Discontinuity, Behavior CZM - EXP and Piloting of The LoadingMilaniStefanoNo ratings yet
- Code - Aster: Order Defi - Char - GroundDocument6 pagesCode - Aster: Order Defi - Char - GroundMilaniStefanoNo ratings yet
- Code - Aster: SZLZ101 - Calculation of The Damage/method RainflowDocument5 pagesCode - Aster: SZLZ101 - Calculation of The Damage/method RainflowMilaniStefanoNo ratings yet
- Code - Aster: SZLZ102 - Tiredness With Various Methods of CountingDocument5 pagesCode - Aster: SZLZ102 - Tiredness With Various Methods of CountingMilaniStefanoNo ratings yet
- Code - Aster: Law of Behavior ENDO - ORTH - BETONDocument44 pagesCode - Aster: Law of Behavior ENDO - ORTH - BETONMilaniStefanoNo ratings yet
- Code - Aster: SZLZ100 - Tiredness On An Eccentric CycleDocument6 pagesCode - Aster: SZLZ100 - Tiredness On An Eccentric CycleMilaniStefanoNo ratings yet
- Code - Aster: Models of Behavior THHMDocument60 pagesCode - Aster: Models of Behavior THHMMilaniStefanoNo ratings yet
- Code - Aster: Extended Finite Method Element: General InformationDocument99 pagesCode - Aster: Extended Finite Method Element: General InformationMilaniStefanoNo ratings yet
- Code - Aster: Modeling of Thermohydration, The Drying and The Shrinking of The ConcreteDocument16 pagesCode - Aster: Modeling of Thermohydration, The Drying and The Shrinking of The ConcreteMilaniStefanoNo ratings yet
- Principles of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient Analysis Rev-0 PDFDocument43 pagesPrinciples of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient Analysis Rev-0 PDFMilaniStefanoNo ratings yet
- Temporal DatabaseDocument7 pagesTemporal DatabaseIvniaz Zoref DeysNo ratings yet
- 3300 SystemGuides TecHandBook 5.0Document432 pages3300 SystemGuides TecHandBook 5.0GuillaumeBeauchamp100% (1)
- Kinetics of MethaneDocument7 pagesKinetics of MethaneLEIDY JOHANA PALACIOS SOLERNo ratings yet
- NIH Public Access: Fusion Protein Linkers: Property, Design and FunctionalityDocument32 pagesNIH Public Access: Fusion Protein Linkers: Property, Design and FunctionalityDeepak KumarNo ratings yet
- Lexicon Ultra Low Temperature Up-Right Freezer: Cascade Refrigeration System: - 40 CTO-86 CDocument2 pagesLexicon Ultra Low Temperature Up-Right Freezer: Cascade Refrigeration System: - 40 CTO-86 CluisrayvcNo ratings yet
- Expert: Rotating MachineryDocument13 pagesExpert: Rotating MachineryJolito RamosNo ratings yet
- bullion-HT003 PCIe Adapter Firmware Updatev2Document14 pagesbullion-HT003 PCIe Adapter Firmware Updatev2Fabrice PLATELNo ratings yet
- Prog 3112 First-Quarter-Exam - Attempt-ReviewDocument18 pagesProg 3112 First-Quarter-Exam - Attempt-ReviewBrail anne Grapa100% (1)
- ERIKS - Simrit Merkel Omegat Stangafdichtingen (OMS-SPR)Document6 pagesERIKS - Simrit Merkel Omegat Stangafdichtingen (OMS-SPR)Sérgio GomesNo ratings yet
- Daytona 675R BrochureDocument8 pagesDaytona 675R BrochureKatreddi Chandu SaiNo ratings yet
- Sp-2 Class Xi Level IIIDocument105 pagesSp-2 Class Xi Level IIIDHOLA VRAJ RAMESHBHAINo ratings yet
- Space ExplorerDocument126 pagesSpace ExplorerJohn Vivian Prashant jp7vivianNo ratings yet
- Basic Principles in Formworks Design-ACELDocument44 pagesBasic Principles in Formworks Design-ACELronelyn bernalNo ratings yet
- Physics Practical For Class 10.Document16 pagesPhysics Practical For Class 10.uzayerrahman06No ratings yet
- ABG Made Simple: DR Satish Deopujari Founder National Chairman (India) PICC 1998Document19 pagesABG Made Simple: DR Satish Deopujari Founder National Chairman (India) PICC 1998Bimantoko Hadi Sriyono100% (1)
- Module 28CDocument24 pagesModule 28CAfia S HameedNo ratings yet
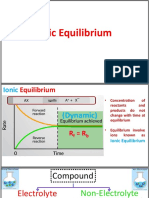
- Ionic EquilibriumDocument14 pagesIonic Equilibrium8842 AnuragNo ratings yet
- Section I (Compulsory) Will Contain Short Answer: Class XDocument5 pagesSection I (Compulsory) Will Contain Short Answer: Class XGeorge Stephen TharakanNo ratings yet
- Rational ExponentsDocument3 pagesRational ExponentsRexie Ann VillasisNo ratings yet
- Gesture Timbre Space CMMR LNCSDocument24 pagesGesture Timbre Space CMMR LNCSmichaelzedNo ratings yet
- Unit 2 PDFDocument15 pagesUnit 2 PDFtarakesh17100% (1)
- Manual Parte 10 Tool PathDocument49 pagesManual Parte 10 Tool PathKevin ContrerasNo ratings yet
- Cambridge Ordinary LevelDocument20 pagesCambridge Ordinary Levelqsqt78jq6yNo ratings yet
- Quality Assurance of Pressure-Sensitive Tapes: Standard Practice ForDocument6 pagesQuality Assurance of Pressure-Sensitive Tapes: Standard Practice ForYoga PradanaNo ratings yet
- 6104 BSF SM EstufaDocument20 pages6104 BSF SM EstufadieguineoNo ratings yet
- RFI Radiographic Film Interpretation 30 - October - 2020Document7 pagesRFI Radiographic Film Interpretation 30 - October - 2020SUNIL BABURAO GAVADENo ratings yet
- Avk Gate Valve PN 10 or PN 16 06/30 - 26/00Document2 pagesAvk Gate Valve PN 10 or PN 16 06/30 - 26/00Popescu OctavianNo ratings yet
- Picture Group Name/Command Description ClipboardDocument13 pagesPicture Group Name/Command Description ClipboardAnn JimenezNo ratings yet