Download as pdf or txt
You might also like
- Analytic Geometry Supplementary ProblemsDocument4 pagesAnalytic Geometry Supplementary ProblemsJohn Elver VeriNo ratings yet
- Hour Exam 3 SolutionsDocument4 pagesHour Exam 3 SolutionscekardNo ratings yet
- MES-2 4th WeekDocument19 pagesMES-2 4th WeekcokoNo ratings yet
- Course: DD2427 - Exercise Class 1: Exercise 1 Motivation For The Linear NeuronDocument5 pagesCourse: DD2427 - Exercise Class 1: Exercise 1 Motivation For The Linear Neuronscribdtvu5No ratings yet
- Genmath - Module 1Document6 pagesGenmath - Module 1Rex Reu PortaNo ratings yet
- Topics Entry Test IBEB NonCD Version 2014Document5 pagesTopics Entry Test IBEB NonCD Version 2014YonYonNo ratings yet
- Matlab Exercises: IP Summer School at UW: 1 Basic Matrix ManipulationDocument6 pagesMatlab Exercises: IP Summer School at UW: 1 Basic Matrix ManipulationDierk LüdersNo ratings yet
- Gradients DerivativesDocument23 pagesGradients Derivativesn190793No ratings yet
- Lab 00 IntroMATLAB2 PDFDocument11 pagesLab 00 IntroMATLAB2 PDF'Jph Flores BmxNo ratings yet
- Lecture 3Document6 pagesLecture 3د. سعد قاسم الاجهزة الطبيةNo ratings yet
- Problem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesDocument5 pagesProblem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesAman JalanNo ratings yet
- College Algebra - Sample12qwDocument25 pagesCollege Algebra - Sample12qwAbchoNo ratings yet
- Prac Final HintsDocument3 pagesPrac Final Hintscicin8190No ratings yet
- Beginner Matlab ODEDocument27 pagesBeginner Matlab ODEKen IkedaNo ratings yet
- 2024-02-20 MA110 Slides CompilationDocument62 pages2024-02-20 MA110 Slides CompilationmayankspareNo ratings yet
- Homework 2Document4 pagesHomework 2Majid GhNo ratings yet
- Lecture 2.1: Vector Calculus CSC 84020 - Machine Learning: Andrew RosenbergDocument46 pagesLecture 2.1: Vector Calculus CSC 84020 - Machine Learning: Andrew RosenbergAli BhuttaNo ratings yet
- Unit 1 Notes PDFDocument18 pagesUnit 1 Notes PDFCharles GribbenNo ratings yet
- Homework00-Solutions S14Document4 pagesHomework00-Solutions S14Mugisha AlainNo ratings yet
- Lecture 3 EigenvaluesDocument38 pagesLecture 3 EigenvaluesRamzan8850No ratings yet
- Calculus ModuleDocument12 pagesCalculus ModulejitlcompanyNo ratings yet
- Matlab DrWasaNDocument48 pagesMatlab DrWasaNwasan.engNo ratings yet
- Math 304 Exam #2A - Solutions Sections 3.1-4.2Document5 pagesMath 304 Exam #2A - Solutions Sections 3.1-4.2KaneNo ratings yet
- Math 21 Problem Set 4Document2 pagesMath 21 Problem Set 4mefelicianoNo ratings yet
- Lec3 Structural Data Types in PythonDocument46 pagesLec3 Structural Data Types in PythonShanti GroverNo ratings yet
- Order of Operation (If Parentheses, Square Brackets, or Fraction Bars Are Present:)Document4 pagesOrder of Operation (If Parentheses, Square Brackets, or Fraction Bars Are Present:)Me, Myself and INo ratings yet
- RelationsDocument25 pagesRelationsAnderson AlfredNo ratings yet
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDocument7 pagesAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolNo ratings yet
- Lab Maple8 TutorialDocument10 pagesLab Maple8 TutorialPop RobertNo ratings yet
- Linear Programming - Graphical MethodDocument5 pagesLinear Programming - Graphical MethodDaleyThomasNo ratings yet
- MidSem Model Sol2024Document11 pagesMidSem Model Sol2024rajyash.kgp2.0No ratings yet
- 5 Amt 2 Rev SolDocument7 pages5 Amt 2 Rev SolZakria ToorNo ratings yet
- Functions and Their Applications: ChapteDocument13 pagesFunctions and Their Applications: ChapteDogiNo ratings yet
- Principal MinorsDocument4 pagesPrincipal Minorsringsred100% (1)
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001No ratings yet
- T&S BookDocument8 pagesT&S BookFun TimeNo ratings yet
- Control Systems Lab No. 01 (Matlab Basics)Document12 pagesControl Systems Lab No. 01 (Matlab Basics)Ashno KhanNo ratings yet
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Document12 pagesLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDNo ratings yet
- Extremum and Concavity of A Single Variable FunctionDocument6 pagesExtremum and Concavity of A Single Variable FunctionAbirami SNo ratings yet
- Level K: Equations of Quadratic FunctionsDocument6 pagesLevel K: Equations of Quadratic FunctionsVishal Kunnathur SenthilkumarNo ratings yet
- Calculus 1 - StudocDocument12 pagesCalculus 1 - Studocarvie montemayorNo ratings yet
- Week 004Document20 pagesWeek 004penpentjig143No ratings yet
- 2014 2 KL SMK Desa Mahkota - MATHS QADocument9 pages2014 2 KL SMK Desa Mahkota - MATHS QASK100% (1)
- MathEcon17 FinalExam SolutionDocument13 pagesMathEcon17 FinalExam SolutionCours HECNo ratings yet
- Part4 Linear EquationsDocument39 pagesPart4 Linear Equationszepozepo06No ratings yet
- Lab 2 ManualDocument11 pagesLab 2 ManualJagadish ChandraNo ratings yet
- MA111 Lec8 D3D4Document33 pagesMA111 Lec8 D3D4pahnhnykNo ratings yet
- 1.1 Concept of A FunctionDocument10 pages1.1 Concept of A FunctionJoe VicenteNo ratings yet
- Monte Carlo Methods in Finance: Homework: Chapter 2Document3 pagesMonte Carlo Methods in Finance: Homework: Chapter 2mklitabeNo ratings yet
- Business Mathematics CH-2Document40 pagesBusiness Mathematics CH-2Aynetu TerefeNo ratings yet
- HW7 SolDocument6 pagesHW7 Solmetmet476No ratings yet
- MATH110 Homework 10: OutlineDocument4 pagesMATH110 Homework 10: OutlineTaylor TamNo ratings yet
- Genmath Module 2Document14 pagesGenmath Module 2Mori OugaiNo ratings yet
- Calculus 1 Ama Source PageDocument279 pagesCalculus 1 Ama Source PageLoving Angel100% (1)
- Calculus 1 Ama Source PageDocument279 pagesCalculus 1 Ama Source PageLoving AngelNo ratings yet
- Assignment 11 Answers Math 130 Linear AlgebraDocument3 pagesAssignment 11 Answers Math 130 Linear AlgebraCody SageNo ratings yet
- Polynomial Functions Unit Assignment PDFDocument10 pagesPolynomial Functions Unit Assignment PDFShaiel Fabiana Redondo QuinteroNo ratings yet
- Quiz 1 Problems and SolutionsDocument10 pagesQuiz 1 Problems and SolutionsNafiur RahmanNo ratings yet
- Quadratic Curves, Quadric SurfacesDocument33 pagesQuadratic Curves, Quadric SurfacesshekhawatmahaveerNo ratings yet
- Massachusetts Institute of Technology: 6.867 Machine Learning, Fall 2006 Problem Set 2: SolutionsDocument7 pagesMassachusetts Institute of Technology: 6.867 Machine Learning, Fall 2006 Problem Set 2: Solutionsjuanagallardo01No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- HDPE BrochureDocument12 pagesHDPE BrochureAnkur SahuNo ratings yet
- Public Notice 48-2023Document3 pagesPublic Notice 48-2023Ankur SahuNo ratings yet
- Sos RPHS020Document11 pagesSos RPHS020Ankur SahuNo ratings yet
- Delhi ForecastDocument2 pagesDelhi ForecastAnkur SahuNo ratings yet
- City-Wise List of Empanelled Hospitals in NCR by FCI North Zone As On 25.07.2023Document10 pagesCity-Wise List of Empanelled Hospitals in NCR by FCI North Zone As On 25.07.2023Ankur SahuNo ratings yet
- Binary Search Trees (BST'S)Document39 pagesBinary Search Trees (BST'S)Ankur SahuNo ratings yet
- Asymptotic NotaionsDocument42 pagesAsymptotic NotaionsAnkur SahuNo ratings yet
- Functions, Scoping and AbstractionDocument48 pagesFunctions, Scoping and AbstractionAnkur SahuNo ratings yet
- Array Implementation of ListDocument22 pagesArray Implementation of ListAnkur SahuNo ratings yet
- Linear Algebra BasicsDocument80 pagesLinear Algebra BasicsAnkur SahuNo ratings yet
- Lab 5Document6 pagesLab 5Ankur SahuNo ratings yet
- Lab 1Document8 pagesLab 1Ankur SahuNo ratings yet
- Topic:: Foundations of Statistics and Probability For Data ScienceDocument55 pagesTopic:: Foundations of Statistics and Probability For Data ScienceAnkur SahuNo ratings yet
- Datasheet: 12 Cal Arc Flash Protective SuitDocument1 pageDatasheet: 12 Cal Arc Flash Protective SuitAnkur SahuNo ratings yet
- Inherent Flame Resistant Coverall (R Design) PWIFR12011R: QF/RD/05 00 01 04-09-2020Document2 pagesInherent Flame Resistant Coverall (R Design) PWIFR12011R: QF/RD/05 00 01 04-09-2020Ankur SahuNo ratings yet
- Objectives:: Linear Discriminant AnalysisDocument10 pagesObjectives:: Linear Discriminant AnalysisAlvin JeremiaNo ratings yet
- NoticeDocument86 pagesNoticejagukisuvisuNo ratings yet
- Halley's Method and Newton-Raphson For Solving F (X) 0Document11 pagesHalley's Method and Newton-Raphson For Solving F (X) 0Dr Srinivasan Nenmeli -KNo ratings yet
- SIMULTANEOUS EQUATIONS MethodDocument7 pagesSIMULTANEOUS EQUATIONS MethodPaula FanaNo ratings yet
- MA2008 2 Hours Sample Exam 1: April 2006 SECTION A - Answer All ALL Questions - 50 MarksDocument4 pagesMA2008 2 Hours Sample Exam 1: April 2006 SECTION A - Answer All ALL Questions - 50 MarkslordpersonNo ratings yet
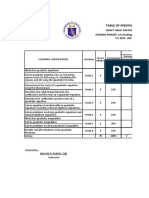
- Sample of Table of SpecificationDocument2 pagesSample of Table of Specificationprettycry barillaNo ratings yet
- Final Training Matrix MathDocument9 pagesFinal Training Matrix MathShanna Basallo AlentonNo ratings yet
- 1.5 Solving Quadratic Equations: Part 1: Solve by FactoringDocument7 pages1.5 Solving Quadratic Equations: Part 1: Solve by FactoringJihye ChoiNo ratings yet
- Handouts of Maxima Software For Mathematics PracticalDocument5 pagesHandouts of Maxima Software For Mathematics PracticalUttam KhardeNo ratings yet
- CBSE VIII Class Mathematics Pre Mid Term Question PapersDocument4 pagesCBSE VIII Class Mathematics Pre Mid Term Question PapersVIGNESH YNo ratings yet
- Math3705 NotesDocument82 pagesMath3705 NotesmisoNo ratings yet
- Syllabus: Cambridge O Level Additional Mathematics 4037Document22 pagesSyllabus: Cambridge O Level Additional Mathematics 4037Anonymous WKKGKzNo ratings yet
- IB Questionbank Mathematics Higher Level 3rd Edition 1Document16 pagesIB Questionbank Mathematics Higher Level 3rd Edition 1Martin DelgadoNo ratings yet
- Tree 0Document65 pagesTree 0Jorge PachasNo ratings yet
- Ngec 4ge4 Prelim ModuleDocument22 pagesNgec 4ge4 Prelim ModuleJane Lee VillacostaNo ratings yet
- Diffie-Hellman Key ExchangeDocument22 pagesDiffie-Hellman Key ExchangesubburajsNo ratings yet
- The Hot Tub-CalculusLessonDocument5 pagesThe Hot Tub-CalculusLessonbayanooNo ratings yet
- Algebra TilesDocument56 pagesAlgebra Tilesboostoberoi100% (1)
- IEOR 6711: Stochastic Models I Fall 2012, Professor Whitt Solutions To Homework Assignment 1Document16 pagesIEOR 6711: Stochastic Models I Fall 2012, Professor Whitt Solutions To Homework Assignment 1Songya PanNo ratings yet
- QbitSSH v6Document10 pagesQbitSSH v6Michael HilkeNo ratings yet
- GCE As Level Quadratics Hidden Quadratics Quadratic Equations in Some Function of XDocument5 pagesGCE As Level Quadratics Hidden Quadratics Quadratic Equations in Some Function of XHANSNo ratings yet
- Maths For ScienceDocument838 pagesMaths For ScienceinfoparaclaseNo ratings yet
- Multiplication of VectorsDocument10 pagesMultiplication of VectorsRaynardBenedictBelenNo ratings yet
- Grade7 218137 1182 9378Document11 pagesGrade7 218137 1182 9378Gbuarts Eleah PiamonteNo ratings yet
- Variational Based FEMDocument67 pagesVariational Based FEMfefahimNo ratings yet
- General Mathematics: Logarithmic Functions, Equations, and InequalitiesDocument18 pagesGeneral Mathematics: Logarithmic Functions, Equations, and InequalitiesMaster ChooklaNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityRavi ModiNo ratings yet
- ENM1600 Engineering Mathematics: DR Trevor LanglandsDocument18 pagesENM1600 Engineering Mathematics: DR Trevor LanglandsJVNo ratings yet
- General Mathematics (MATH 01) : Chapter 3 ModuleDocument14 pagesGeneral Mathematics (MATH 01) : Chapter 3 ModuleKen AguilaNo ratings yet