
Vibration and Noise Analysis of A Gear Transmissio
Vibration and Noise Analysis of A Gear Transmissio
You might also like
- 2nd Term Biology Note For Ss2Document33 pages2nd Term Biology Note For Ss2Ukwuma Michael Chijioke100% (21)
- Gramática AwáDocument422 pagesGramática AwáJaghu San100% (1)
- 1601352-BFP-046 - Recommended Operational Spare Parts For BFP - Rev.CDocument2 pages1601352-BFP-046 - Recommended Operational Spare Parts For BFP - Rev.CMena Kamel100% (1)
- Comparison of Analysis and Experiment For Gearbox NoiseDocument8 pagesComparison of Analysis and Experiment For Gearbox NoiseAmrendraNo ratings yet
- Materials 16 04647Document41 pagesMaterials 16 04647Jelena KilićNo ratings yet
- Shock Response SpectrumDocument39 pagesShock Response Spectrumtruva_kissNo ratings yet
- Nondestructive Testing of Pavements and Backcalculation of Moduli: Third Volume, ASTM STP 137.5, S. DDocument15 pagesNondestructive Testing of Pavements and Backcalculation of Moduli: Third Volume, ASTM STP 137.5, S. DMahdi SardarNo ratings yet
- Master List of Experiment: Geeta Engineering College, Panipat Practical Experiment Instruction SheetDocument30 pagesMaster List of Experiment: Geeta Engineering College, Panipat Practical Experiment Instruction SheetAjay Kumar AgarwalNo ratings yet
- Njit Etd1991 040Document204 pagesNjit Etd1991 040Nitin shepurNo ratings yet
- PDFDocument129 pagesPDFPedro ArangoNo ratings yet
- 10.1515 - Ract 2023 01794Document11 pages10.1515 - Ract 2023 01794sacNo ratings yet
- ADA307702Document234 pagesADA307702Andres Rodriguez HerreraNo ratings yet
- General Disclaimer One or More of The Following Statements May Affect This DocumentDocument26 pagesGeneral Disclaimer One or More of The Following Statements May Affect This DocumentEl Aziz El MehdiNo ratings yet
- In-Space Propulsion High Voltage Hall Accelerator Development Project OverviewDocument11 pagesIn-Space Propulsion High Voltage Hall Accelerator Development Project OverviewSuman RachaNo ratings yet
- Repeated Buckling and Postbuckling Behavior of LamDocument4 pagesRepeated Buckling and Postbuckling Behavior of LamIkram FeddalNo ratings yet
- Analysis and Optimization of Cyclone Separators With Eccentric VortexDocument15 pagesAnalysis and Optimization of Cyclone Separators With Eccentric VortexTanweer HussainNo ratings yet
- A Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersDocument9 pagesA Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersPrasad PatilNo ratings yet
- Evaluation of Seismic Design Criteria For Rocking Objects in Nuclear FacilitiesDocument120 pagesEvaluation of Seismic Design Criteria For Rocking Objects in Nuclear FacilitiessergioNo ratings yet
- Carrigan 2002 0446Document24 pagesCarrigan 2002 0446Particle Beam Physics LabNo ratings yet
- Experimental Study of Tile Grout Material Behavior: June 2014Document5 pagesExperimental Study of Tile Grout Material Behavior: June 2014lokkythorNo ratings yet
- AMathematical Hysteretic Modelfor Elastomeric IsolationDocument20 pagesAMathematical Hysteretic Modelfor Elastomeric IsolationReza KarimiNo ratings yet
- Editorial-Board-and-Scope_2014_Journal-of-Materials-Processing-TechnologyDocument1 pageEditorial-Board-and-Scope_2014_Journal-of-Materials-Processing-TechnologyEdipo SantosNo ratings yet
- Parametric Investigation of Idealized Hypersonic Cruise ConfigurationsDocument9 pagesParametric Investigation of Idealized Hypersonic Cruise ConfigurationsumangdigheNo ratings yet
- Ubc - 1985 - A7 F54 PDFDocument71 pagesUbc - 1985 - A7 F54 PDFChetan PatilNo ratings yet
- Evaluation of Engineering Properties of Rock Using Ultrasonic Pulse Velocity and Uniaxial Compressive StrengthDocument7 pagesEvaluation of Engineering Properties of Rock Using Ultrasonic Pulse Velocity and Uniaxial Compressive StrengthAzeNo ratings yet
- ADocument20 pagesAAlan Valdez MontoyaNo ratings yet
- NPARC MethodDocument11 pagesNPARC MethodSơn HustmanNo ratings yet
- Ground Motion For Earthquake SimulatorDocument195 pagesGround Motion For Earthquake SimulatorRani Hendrikus100% (1)
- Upload 1Document15 pagesUpload 1Anshuman SinghNo ratings yet
- Multi-Failure Analysis ofDocument14 pagesMulti-Failure Analysis ofshabberNo ratings yet
- 5tgfhdf1 1Document9 pages5tgfhdf1 1SmileNo ratings yet
- Nl/SI/: LibraryDocument58 pagesNl/SI/: LibraryShaun Raphael LeeNo ratings yet
- Design Study To Improve Pioneer LouverDocument76 pagesDesign Study To Improve Pioneer LouverLanceNo ratings yet
- Plane-Stress Fracture Toughness Testing Using A Crack-Line-Loaded SpeclmentDocument22 pagesPlane-Stress Fracture Toughness Testing Using A Crack-Line-Loaded SpeclmentRama chandraNo ratings yet
- Test11 SummaryDocument18 pagesTest11 SummaryFransisca WijayaNo ratings yet
- Jadav 1Document18 pagesJadav 1epic sansNo ratings yet
- Measurement of Dynamic Parameters of Automotive ExDocument9 pagesMeasurement of Dynamic Parameters of Automotive ExNarendra Joseph KumarNo ratings yet
- Rotating Brush SealDocument9 pagesRotating Brush SealMohamed ElgendyNo ratings yet
- Modelling and Testing of The Piezoelectric Beam AsDocument6 pagesModelling and Testing of The Piezoelectric Beam AsViktor BakacsNo ratings yet
- Strength of Welded Joints Under Combined Shear and Out-Of-Plane BendingDocument12 pagesStrength of Welded Joints Under Combined Shear and Out-Of-Plane BendingPatrick PolujanNo ratings yet
- Zirakian, 2005Document9 pagesZirakian, 2005carlosNo ratings yet
- Shaking Table Test of A Reduced-Scale Structure With Copper-Based Sma Energy Dissipation DevicesDocument11 pagesShaking Table Test of A Reduced-Scale Structure With Copper-Based Sma Energy Dissipation Devicesr3dh34rtNo ratings yet
- Nightingale1951 (OTVORI AMORTIZERA STAJNOG TRAPA PAVLOVIC)Document3 pagesNightingale1951 (OTVORI AMORTIZERA STAJNOG TRAPA PAVLOVIC)Miroljub MaksimovicNo ratings yet
- 2-R 0.67 in Plaxis Arching Around Buried Square Section StructuresDocument5 pages2-R 0.67 in Plaxis Arching Around Buried Square Section StructuresthamiradNo ratings yet
- TarjomeFa F463 EnglishDocument15 pagesTarjomeFa F463 EnglishariNo ratings yet
- Design of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystemDocument10 pagesDesign of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystembeNo ratings yet
- Vibration Analysis of An Induction MotorDocument25 pagesVibration Analysis of An Induction MotorSanthosh KumarNo ratings yet
- Characteristics of High-Speed Cyclic Test of Beam-Column JointsDocument9 pagesCharacteristics of High-Speed Cyclic Test of Beam-Column JointsMarimuthu KaliyamoorthyNo ratings yet
- Effect of Chevron On The Decay Characteristics of Compressible Round JetDocument8 pagesEffect of Chevron On The Decay Characteristics of Compressible Round JetTJPRC PublicationsNo ratings yet
- ASTMD7264 FlexuralCompDocument194 pagesASTMD7264 FlexuralCompDaniel Maldonado ForinNo ratings yet
- Cyclone Collection Efficiency PDFDocument11 pagesCyclone Collection Efficiency PDFSiddharth SinghNo ratings yet
- Supersonic Axial Stage Separation of An Unguided Rocket: ConfigurationsDocument7 pagesSupersonic Axial Stage Separation of An Unguided Rocket: Configurationsoso5755No ratings yet
- Cyclic Performance of Full-Scale RC Columns Retrofitted Using External Jacketing MethodsDocument8 pagesCyclic Performance of Full-Scale RC Columns Retrofitted Using External Jacketing MethodsangelomarinilliNo ratings yet
- Bloem Bergen 1974Document12 pagesBloem Bergen 1974slavasxiNo ratings yet
- Engineering Structures: Asad Naeem, Jinkoo Kim TDocument13 pagesEngineering Structures: Asad Naeem, Jinkoo Kim TMarcos-CarvalhoNo ratings yet
- Cyclic Load Tests On Prestressed and Partially Prestressed Beam-Column Joints PARK & THOMPSONDocument27 pagesCyclic Load Tests On Prestressed and Partially Prestressed Beam-Column Joints PARK & THOMPSONprakashsomuNo ratings yet
- Krypton Ion Thruster PerformanceDocument13 pagesKrypton Ion Thruster PerformanceWilliam RiveraNo ratings yet
- Report BucklingDocument17 pagesReport Bucklingfaris danialNo ratings yet
- Dynamic Properties of Geologic Specimens Subjected To Split-Hopkinson Pressure Bar Compression Testing at The University of KentuckyDocument17 pagesDynamic Properties of Geologic Specimens Subjected To Split-Hopkinson Pressure Bar Compression Testing at The University of KentuckyArmats GiarnellyNo ratings yet
- Performance Evaluation of RC Structures Under Earthquake LoadingDocument214 pagesPerformance Evaluation of RC Structures Under Earthquake Loadingwaseq911No ratings yet
- Ceramic Materials for Energy Applications V: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesFrom EverandCeramic Materials for Energy Applications V: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesJosef MatyášNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- NL Chi Tet May CLC - 0001Document8 pagesNL Chi Tet May CLC - 0001hoan thanhNo ratings yet
- Review Pneumatics HydraulicsDocument200 pagesReview Pneumatics Hydraulicshoan thanhNo ratings yet
- 99 Examples of Pneumatic ApplicationsDocument118 pages99 Examples of Pneumatic Applicationshoan thanhNo ratings yet
- Improving Efficiency and Performance of 5Mn Hydraulic Press Through Effective Preventive Maintenance Engineering and Management TechniquesDocument19 pagesImproving Efficiency and Performance of 5Mn Hydraulic Press Through Effective Preventive Maintenance Engineering and Management Techniqueshoan thanhNo ratings yet
- Dap An Mon Cscnctmay-Fmmt330825Document3 pagesDap An Mon Cscnctmay-Fmmt330825hoan thanhNo ratings yet
- Maintenance Awareness in Gear-Box Design: Samo Ulaga, Branko Tašner, Aleš Belšak and Jože FlaškerDocument6 pagesMaintenance Awareness in Gear-Box Design: Samo Ulaga, Branko Tašner, Aleš Belšak and Jože Flaškerhoan thanhNo ratings yet
- De Thi Mon CS Cong Nghe CTM FMMT330825Document7 pagesDe Thi Mon CS Cong Nghe CTM FMMT330825hoan thanhNo ratings yet
- Lathe Machine and It'S Mechanism 1.1. Introdunction: Mechanics and Mechanical Engineering June 2020Document13 pagesLathe Machine and It'S Mechanism 1.1. Introdunction: Mechanics and Mechanical Engineering June 2020hoan thanhNo ratings yet
- OSHA Machine Guarding2Document63 pagesOSHA Machine Guarding2hoan thanhNo ratings yet
- Aircraft Material & Production - MANUALDocument45 pagesAircraft Material & Production - MANUALKV Yashwanth100% (1)
- Active and Passive VoiceDocument3 pagesActive and Passive VoiceCray CrayNo ratings yet
- Jab Chem Nat 5 Question Banks All ExamsDocument55 pagesJab Chem Nat 5 Question Banks All ExamsHariNo ratings yet
- AHF Thesis - CorrectedDocument146 pagesAHF Thesis - CorrectedAlasdair FikourasNo ratings yet
- SOC FlyerDocument2 pagesSOC Flyersammer1985No ratings yet
- ASON SLA Classification of ServicesDocument6 pagesASON SLA Classification of ServicesWondale KebedeNo ratings yet
- Consolidated Teachers Individual Plan For Professional Development SCHOOL YEAR 2020-2021Document2 pagesConsolidated Teachers Individual Plan For Professional Development SCHOOL YEAR 2020-2021Anicadlien Ellipaw IninNo ratings yet
- BUMA 20023: Strategic Management: Andal, Andrei Feyan P. Bsba HRM 1-1DDocument31 pagesBUMA 20023: Strategic Management: Andal, Andrei Feyan P. Bsba HRM 1-1DCurt Abenoja100% (1)
- Application of IntegralsDocument14 pagesApplication of IntegralsSanjayNo ratings yet
- Comprobante SantanderDocument26 pagesComprobante SantanderCristinaNo ratings yet
- 2f Making Frequency Distribution Graph RStudioDocument7 pages2f Making Frequency Distribution Graph RStudioGordon FreemanNo ratings yet
- Carbohydrates Discussion Questions and AnswersDocument2 pagesCarbohydrates Discussion Questions and AnswerslolstudentNo ratings yet
- CL3600-2023-Lecture 4-Cell Growth KineticsDocument62 pagesCL3600-2023-Lecture 4-Cell Growth KineticsJodie BakerNo ratings yet
- Machine (Mechanical) - Wikipedia, The Free EncyclopediaDocument10 pagesMachine (Mechanical) - Wikipedia, The Free EncyclopediabmxengineeringNo ratings yet
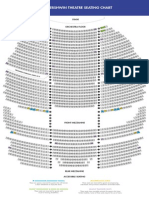
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- A Sophisticated and Automated Form of TLCDocument25 pagesA Sophisticated and Automated Form of TLCIshfaq AhmadNo ratings yet
- BU ProspectusDocument40 pagesBU ProspectusVikram YadavNo ratings yet
- De So 2 de Kiem Tra Hoc Ky 2 Tieng Anh 8 Moi 1681274649Document4 pagesDe So 2 de Kiem Tra Hoc Ky 2 Tieng Anh 8 Moi 1681274649Mai ChiNo ratings yet
- Pressure - Enthalpy Diagram For The Refrigerant R-22: Li Q U IdDocument1 pagePressure - Enthalpy Diagram For The Refrigerant R-22: Li Q U IdRifki AuliaNo ratings yet
- SOPs River Sand and Stone Mining ActivitiesDocument64 pagesSOPs River Sand and Stone Mining ActivitiesAliffIrhamMohdHashimNo ratings yet
- Amanpulo FactsheetDocument6 pagesAmanpulo FactsheetAlexNo ratings yet
- SolidCAM 2015 IMachining FAQDocument55 pagesSolidCAM 2015 IMachining FAQhed_panNo ratings yet
- SQL Exercise 1&2Document3 pagesSQL Exercise 1&2Ken 07No ratings yet
- Rural Development: 14.1. Rural Scenario in Tamil NaduDocument17 pagesRural Development: 14.1. Rural Scenario in Tamil NaduhinduNo ratings yet
- Time Value of Money: Compound InterestDocument28 pagesTime Value of Money: Compound InterestkateNo ratings yet
- A Study of The Exposure To Wood Dust and Potential Impact On Lung FunctionDocument9 pagesA Study of The Exposure To Wood Dust and Potential Impact On Lung FunctionIin Sakinah DewiNo ratings yet
- Illinois State Board of Education: General InformationDocument40 pagesIllinois State Board of Education: General InformationLeslie AtkinsonNo ratings yet


































































































Download as pdf or txt
You might also like
- 2nd Term Biology Note For Ss2Document33 pages2nd Term Biology Note For Ss2Ukwuma Michael Chijioke100% (21)
- Gramática AwáDocument422 pagesGramática AwáJaghu San100% (1)
- 1601352-BFP-046 - Recommended Operational Spare Parts For BFP - Rev.CDocument2 pages1601352-BFP-046 - Recommended Operational Spare Parts For BFP - Rev.CMena Kamel100% (1)
- Comparison of Analysis and Experiment For Gearbox NoiseDocument8 pagesComparison of Analysis and Experiment For Gearbox NoiseAmrendraNo ratings yet
- Materials 16 04647Document41 pagesMaterials 16 04647Jelena KilićNo ratings yet
- Shock Response SpectrumDocument39 pagesShock Response Spectrumtruva_kissNo ratings yet
- Nondestructive Testing of Pavements and Backcalculation of Moduli: Third Volume, ASTM STP 137.5, S. DDocument15 pagesNondestructive Testing of Pavements and Backcalculation of Moduli: Third Volume, ASTM STP 137.5, S. DMahdi SardarNo ratings yet
- Master List of Experiment: Geeta Engineering College, Panipat Practical Experiment Instruction SheetDocument30 pagesMaster List of Experiment: Geeta Engineering College, Panipat Practical Experiment Instruction SheetAjay Kumar AgarwalNo ratings yet
- Njit Etd1991 040Document204 pagesNjit Etd1991 040Nitin shepurNo ratings yet
- PDFDocument129 pagesPDFPedro ArangoNo ratings yet
- 10.1515 - Ract 2023 01794Document11 pages10.1515 - Ract 2023 01794sacNo ratings yet
- ADA307702Document234 pagesADA307702Andres Rodriguez HerreraNo ratings yet
- General Disclaimer One or More of The Following Statements May Affect This DocumentDocument26 pagesGeneral Disclaimer One or More of The Following Statements May Affect This DocumentEl Aziz El MehdiNo ratings yet
- In-Space Propulsion High Voltage Hall Accelerator Development Project OverviewDocument11 pagesIn-Space Propulsion High Voltage Hall Accelerator Development Project OverviewSuman RachaNo ratings yet
- Repeated Buckling and Postbuckling Behavior of LamDocument4 pagesRepeated Buckling and Postbuckling Behavior of LamIkram FeddalNo ratings yet
- Analysis and Optimization of Cyclone Separators With Eccentric VortexDocument15 pagesAnalysis and Optimization of Cyclone Separators With Eccentric VortexTanweer HussainNo ratings yet
- A Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersDocument9 pagesA Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersPrasad PatilNo ratings yet
- Evaluation of Seismic Design Criteria For Rocking Objects in Nuclear FacilitiesDocument120 pagesEvaluation of Seismic Design Criteria For Rocking Objects in Nuclear FacilitiessergioNo ratings yet
- Carrigan 2002 0446Document24 pagesCarrigan 2002 0446Particle Beam Physics LabNo ratings yet
- Experimental Study of Tile Grout Material Behavior: June 2014Document5 pagesExperimental Study of Tile Grout Material Behavior: June 2014lokkythorNo ratings yet
- AMathematical Hysteretic Modelfor Elastomeric IsolationDocument20 pagesAMathematical Hysteretic Modelfor Elastomeric IsolationReza KarimiNo ratings yet
- Editorial-Board-and-Scope_2014_Journal-of-Materials-Processing-TechnologyDocument1 pageEditorial-Board-and-Scope_2014_Journal-of-Materials-Processing-TechnologyEdipo SantosNo ratings yet
- Parametric Investigation of Idealized Hypersonic Cruise ConfigurationsDocument9 pagesParametric Investigation of Idealized Hypersonic Cruise ConfigurationsumangdigheNo ratings yet
- Ubc - 1985 - A7 F54 PDFDocument71 pagesUbc - 1985 - A7 F54 PDFChetan PatilNo ratings yet
- Evaluation of Engineering Properties of Rock Using Ultrasonic Pulse Velocity and Uniaxial Compressive StrengthDocument7 pagesEvaluation of Engineering Properties of Rock Using Ultrasonic Pulse Velocity and Uniaxial Compressive StrengthAzeNo ratings yet
- ADocument20 pagesAAlan Valdez MontoyaNo ratings yet
- NPARC MethodDocument11 pagesNPARC MethodSơn HustmanNo ratings yet
- Ground Motion For Earthquake SimulatorDocument195 pagesGround Motion For Earthquake SimulatorRani Hendrikus100% (1)
- Upload 1Document15 pagesUpload 1Anshuman SinghNo ratings yet
- Multi-Failure Analysis ofDocument14 pagesMulti-Failure Analysis ofshabberNo ratings yet
- 5tgfhdf1 1Document9 pages5tgfhdf1 1SmileNo ratings yet
- Nl/SI/: LibraryDocument58 pagesNl/SI/: LibraryShaun Raphael LeeNo ratings yet
- Design Study To Improve Pioneer LouverDocument76 pagesDesign Study To Improve Pioneer LouverLanceNo ratings yet
- Plane-Stress Fracture Toughness Testing Using A Crack-Line-Loaded SpeclmentDocument22 pagesPlane-Stress Fracture Toughness Testing Using A Crack-Line-Loaded SpeclmentRama chandraNo ratings yet
- Test11 SummaryDocument18 pagesTest11 SummaryFransisca WijayaNo ratings yet
- Jadav 1Document18 pagesJadav 1epic sansNo ratings yet
- Measurement of Dynamic Parameters of Automotive ExDocument9 pagesMeasurement of Dynamic Parameters of Automotive ExNarendra Joseph KumarNo ratings yet
- Rotating Brush SealDocument9 pagesRotating Brush SealMohamed ElgendyNo ratings yet
- Modelling and Testing of The Piezoelectric Beam AsDocument6 pagesModelling and Testing of The Piezoelectric Beam AsViktor BakacsNo ratings yet
- Strength of Welded Joints Under Combined Shear and Out-Of-Plane BendingDocument12 pagesStrength of Welded Joints Under Combined Shear and Out-Of-Plane BendingPatrick PolujanNo ratings yet
- Zirakian, 2005Document9 pagesZirakian, 2005carlosNo ratings yet
- Shaking Table Test of A Reduced-Scale Structure With Copper-Based Sma Energy Dissipation DevicesDocument11 pagesShaking Table Test of A Reduced-Scale Structure With Copper-Based Sma Energy Dissipation Devicesr3dh34rtNo ratings yet
- Nightingale1951 (OTVORI AMORTIZERA STAJNOG TRAPA PAVLOVIC)Document3 pagesNightingale1951 (OTVORI AMORTIZERA STAJNOG TRAPA PAVLOVIC)Miroljub MaksimovicNo ratings yet
- 2-R 0.67 in Plaxis Arching Around Buried Square Section StructuresDocument5 pages2-R 0.67 in Plaxis Arching Around Buried Square Section StructuresthamiradNo ratings yet
- TarjomeFa F463 EnglishDocument15 pagesTarjomeFa F463 EnglishariNo ratings yet
- Design of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystemDocument10 pagesDesign of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystembeNo ratings yet
- Vibration Analysis of An Induction MotorDocument25 pagesVibration Analysis of An Induction MotorSanthosh KumarNo ratings yet
- Characteristics of High-Speed Cyclic Test of Beam-Column JointsDocument9 pagesCharacteristics of High-Speed Cyclic Test of Beam-Column JointsMarimuthu KaliyamoorthyNo ratings yet
- Effect of Chevron On The Decay Characteristics of Compressible Round JetDocument8 pagesEffect of Chevron On The Decay Characteristics of Compressible Round JetTJPRC PublicationsNo ratings yet
- ASTMD7264 FlexuralCompDocument194 pagesASTMD7264 FlexuralCompDaniel Maldonado ForinNo ratings yet
- Cyclone Collection Efficiency PDFDocument11 pagesCyclone Collection Efficiency PDFSiddharth SinghNo ratings yet
- Supersonic Axial Stage Separation of An Unguided Rocket: ConfigurationsDocument7 pagesSupersonic Axial Stage Separation of An Unguided Rocket: Configurationsoso5755No ratings yet
- Cyclic Performance of Full-Scale RC Columns Retrofitted Using External Jacketing MethodsDocument8 pagesCyclic Performance of Full-Scale RC Columns Retrofitted Using External Jacketing MethodsangelomarinilliNo ratings yet
- Bloem Bergen 1974Document12 pagesBloem Bergen 1974slavasxiNo ratings yet
- Engineering Structures: Asad Naeem, Jinkoo Kim TDocument13 pagesEngineering Structures: Asad Naeem, Jinkoo Kim TMarcos-CarvalhoNo ratings yet
- Cyclic Load Tests On Prestressed and Partially Prestressed Beam-Column Joints PARK & THOMPSONDocument27 pagesCyclic Load Tests On Prestressed and Partially Prestressed Beam-Column Joints PARK & THOMPSONprakashsomuNo ratings yet
- Krypton Ion Thruster PerformanceDocument13 pagesKrypton Ion Thruster PerformanceWilliam RiveraNo ratings yet
- Report BucklingDocument17 pagesReport Bucklingfaris danialNo ratings yet
- Dynamic Properties of Geologic Specimens Subjected To Split-Hopkinson Pressure Bar Compression Testing at The University of KentuckyDocument17 pagesDynamic Properties of Geologic Specimens Subjected To Split-Hopkinson Pressure Bar Compression Testing at The University of KentuckyArmats GiarnellyNo ratings yet
- Performance Evaluation of RC Structures Under Earthquake LoadingDocument214 pagesPerformance Evaluation of RC Structures Under Earthquake Loadingwaseq911No ratings yet
- Ceramic Materials for Energy Applications V: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesFrom EverandCeramic Materials for Energy Applications V: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesJosef MatyášNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- NL Chi Tet May CLC - 0001Document8 pagesNL Chi Tet May CLC - 0001hoan thanhNo ratings yet
- Review Pneumatics HydraulicsDocument200 pagesReview Pneumatics Hydraulicshoan thanhNo ratings yet
- 99 Examples of Pneumatic ApplicationsDocument118 pages99 Examples of Pneumatic Applicationshoan thanhNo ratings yet
- Improving Efficiency and Performance of 5Mn Hydraulic Press Through Effective Preventive Maintenance Engineering and Management TechniquesDocument19 pagesImproving Efficiency and Performance of 5Mn Hydraulic Press Through Effective Preventive Maintenance Engineering and Management Techniqueshoan thanhNo ratings yet
- Dap An Mon Cscnctmay-Fmmt330825Document3 pagesDap An Mon Cscnctmay-Fmmt330825hoan thanhNo ratings yet
- Maintenance Awareness in Gear-Box Design: Samo Ulaga, Branko Tašner, Aleš Belšak and Jože FlaškerDocument6 pagesMaintenance Awareness in Gear-Box Design: Samo Ulaga, Branko Tašner, Aleš Belšak and Jože Flaškerhoan thanhNo ratings yet
- De Thi Mon CS Cong Nghe CTM FMMT330825Document7 pagesDe Thi Mon CS Cong Nghe CTM FMMT330825hoan thanhNo ratings yet
- Lathe Machine and It'S Mechanism 1.1. Introdunction: Mechanics and Mechanical Engineering June 2020Document13 pagesLathe Machine and It'S Mechanism 1.1. Introdunction: Mechanics and Mechanical Engineering June 2020hoan thanhNo ratings yet
- OSHA Machine Guarding2Document63 pagesOSHA Machine Guarding2hoan thanhNo ratings yet
- Aircraft Material & Production - MANUALDocument45 pagesAircraft Material & Production - MANUALKV Yashwanth100% (1)
- Active and Passive VoiceDocument3 pagesActive and Passive VoiceCray CrayNo ratings yet
- Jab Chem Nat 5 Question Banks All ExamsDocument55 pagesJab Chem Nat 5 Question Banks All ExamsHariNo ratings yet
- AHF Thesis - CorrectedDocument146 pagesAHF Thesis - CorrectedAlasdair FikourasNo ratings yet
- SOC FlyerDocument2 pagesSOC Flyersammer1985No ratings yet
- ASON SLA Classification of ServicesDocument6 pagesASON SLA Classification of ServicesWondale KebedeNo ratings yet
- Consolidated Teachers Individual Plan For Professional Development SCHOOL YEAR 2020-2021Document2 pagesConsolidated Teachers Individual Plan For Professional Development SCHOOL YEAR 2020-2021Anicadlien Ellipaw IninNo ratings yet
- BUMA 20023: Strategic Management: Andal, Andrei Feyan P. Bsba HRM 1-1DDocument31 pagesBUMA 20023: Strategic Management: Andal, Andrei Feyan P. Bsba HRM 1-1DCurt Abenoja100% (1)
- Application of IntegralsDocument14 pagesApplication of IntegralsSanjayNo ratings yet
- Comprobante SantanderDocument26 pagesComprobante SantanderCristinaNo ratings yet
- 2f Making Frequency Distribution Graph RStudioDocument7 pages2f Making Frequency Distribution Graph RStudioGordon FreemanNo ratings yet
- Carbohydrates Discussion Questions and AnswersDocument2 pagesCarbohydrates Discussion Questions and AnswerslolstudentNo ratings yet
- CL3600-2023-Lecture 4-Cell Growth KineticsDocument62 pagesCL3600-2023-Lecture 4-Cell Growth KineticsJodie BakerNo ratings yet
- Machine (Mechanical) - Wikipedia, The Free EncyclopediaDocument10 pagesMachine (Mechanical) - Wikipedia, The Free EncyclopediabmxengineeringNo ratings yet
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- A Sophisticated and Automated Form of TLCDocument25 pagesA Sophisticated and Automated Form of TLCIshfaq AhmadNo ratings yet
- BU ProspectusDocument40 pagesBU ProspectusVikram YadavNo ratings yet
- De So 2 de Kiem Tra Hoc Ky 2 Tieng Anh 8 Moi 1681274649Document4 pagesDe So 2 de Kiem Tra Hoc Ky 2 Tieng Anh 8 Moi 1681274649Mai ChiNo ratings yet
- Pressure - Enthalpy Diagram For The Refrigerant R-22: Li Q U IdDocument1 pagePressure - Enthalpy Diagram For The Refrigerant R-22: Li Q U IdRifki AuliaNo ratings yet
- SOPs River Sand and Stone Mining ActivitiesDocument64 pagesSOPs River Sand and Stone Mining ActivitiesAliffIrhamMohdHashimNo ratings yet
- Amanpulo FactsheetDocument6 pagesAmanpulo FactsheetAlexNo ratings yet
- SolidCAM 2015 IMachining FAQDocument55 pagesSolidCAM 2015 IMachining FAQhed_panNo ratings yet
- SQL Exercise 1&2Document3 pagesSQL Exercise 1&2Ken 07No ratings yet
- Rural Development: 14.1. Rural Scenario in Tamil NaduDocument17 pagesRural Development: 14.1. Rural Scenario in Tamil NaduhinduNo ratings yet
- Time Value of Money: Compound InterestDocument28 pagesTime Value of Money: Compound InterestkateNo ratings yet
- A Study of The Exposure To Wood Dust and Potential Impact On Lung FunctionDocument9 pagesA Study of The Exposure To Wood Dust and Potential Impact On Lung FunctionIin Sakinah DewiNo ratings yet
- Illinois State Board of Education: General InformationDocument40 pagesIllinois State Board of Education: General InformationLeslie AtkinsonNo ratings yet