Download as pdf or txt
You might also like
- Leakage Inductance Behavior of Power Transformer Windings Under Mechanical FaultsDocument5 pagesLeakage Inductance Behavior of Power Transformer Windings Under Mechanical Faultshosein bahramian habilNo ratings yet
- How To Use A Multimeter PDFDocument18 pagesHow To Use A Multimeter PDFBala Murugan75% (4)
- Understanding Transformer Nameplates DOBLEDocument26 pagesUnderstanding Transformer Nameplates DOBLEsquelche100% (1)
- Voltage Sag Characterization With Matlab/Simulink: Joaquín Caicedo, Felipe Navarro, Edwin Rivas and Francisco SantamaríaDocument6 pagesVoltage Sag Characterization With Matlab/Simulink: Joaquín Caicedo, Felipe Navarro, Edwin Rivas and Francisco SantamaríaJanice TiongNo ratings yet
- Chapter 2 Literature ReviewDocument10 pagesChapter 2 Literature ReviewVerbs Flores0% (1)
- Trafoi I SagsDocument8 pagesTrafoi I SagsivanramljakNo ratings yet
- Characterization of Voltage Sags in Industrial Distribution SystemsDocument8 pagesCharacterization of Voltage Sags in Industrial Distribution SystemsHamzah RezaNo ratings yet
- Propagation of Voltage SagsDocument8 pagesPropagation of Voltage SagsДинка ИвановаNo ratings yet
- Effect of Repetitive Voltage Sag On Contactor Behavior: International Journal of Engineering & TechnologyDocument4 pagesEffect of Repetitive Voltage Sag On Contactor Behavior: International Journal of Engineering & TechnologyDESMAN SINAGANo ratings yet
- Repetitive Surges PDFDocument7 pagesRepetitive Surges PDFMspamNo ratings yet
- Voltage Sag Propagation: Case Study Based On MeasurementsDocument6 pagesVoltage Sag Propagation: Case Study Based On MeasurementsHafiz MustafaNo ratings yet
- Power Quality Assessment of Large Motor Starting and Loading For The Integrated Steel-Making Cogeneration FacilityDocument8 pagesPower Quality Assessment of Large Motor Starting and Loading For The Integrated Steel-Making Cogeneration FacilityicaanmpzNo ratings yet
- IEEE-The Influence of Motor Reacceleration On Voltage SagsDocument8 pagesIEEE-The Influence of Motor Reacceleration On Voltage SagsGustavo AguayoNo ratings yet
- Sbse2012 GoianiaDocument6 pagesSbse2012 GoianiawirislaysNo ratings yet
- Voltage Sag Characterization in A Distribution Systems: A Case StudyDocument8 pagesVoltage Sag Characterization in A Distribution Systems: A Case Studyhuycanh2511No ratings yet
- Yarmolenko Lab1Document8 pagesYarmolenko Lab1yarmolenkonazar1309No ratings yet
- Transient Stability Analysis of Synchronous Generator in Electrical NetworkDocument5 pagesTransient Stability Analysis of Synchronous Generator in Electrical NetworkSadil BatafNo ratings yet
- AA OptimProtDocument12 pagesAA OptimProtIAMATMANo ratings yet
- Effects of Voltage Unbalance On IM Power, Torque and VibrationsDocument6 pagesEffects of Voltage Unbalance On IM Power, Torque and VibrationsIsaac DiazNo ratings yet
- Voltage Sag and Interruptions-2Document112 pagesVoltage Sag and Interruptions-2raghav4life8724100% (1)
- Brushless ExciterDocument7 pagesBrushless ExcitervgarudaNo ratings yet
- A Technical Investigation of Voltage Sag PDFDocument9 pagesA Technical Investigation of Voltage Sag PDFjuljan sinaniNo ratings yet
- Effect of Unbalanced Voltage On Windings Temperature, Operational Life and Load Carrying Capacity of Induction MachineDocument10 pagesEffect of Unbalanced Voltage On Windings Temperature, Operational Life and Load Carrying Capacity of Induction MachineTarak BenslimaneNo ratings yet
- Tall Am 2002Document6 pagesTall Am 2002AndréNo ratings yet
- EMMI QuestionsDocument31 pagesEMMI QuestionsRAHULNo ratings yet
- Voltage Sag Effects On A Refinery With Induction Motors LoadsDocument6 pagesVoltage Sag Effects On A Refinery With Induction Motors LoadsTarek El-shennawyNo ratings yet
- 001 Implementation of IEEE STD 1564-2014 For Voltage Sag Severity Analysis On A Medium Voltage SubstationDocument6 pages001 Implementation of IEEE STD 1564-2014 For Voltage Sag Severity Analysis On A Medium Voltage SubstationShamere Tiongco BuenoNo ratings yet
- Simulating Three Phase Induction Motor Performance During Different Voltage Sag TypesDocument7 pagesSimulating Three Phase Induction Motor Performance During Different Voltage Sag TypesJOHN MINKHANTNo ratings yet
- Chapter Three Modelling and AnalysisDocument19 pagesChapter Three Modelling and AnalysisAlhji AhmedNo ratings yet
- Behavior of Induction Motor Due To Voltage Sags and Short InterruptionsDocument7 pagesBehavior of Induction Motor Due To Voltage Sags and Short InterruptionsrafaelantoniomolinaNo ratings yet
- M. H. J. Bollen, Understanding Power Quality Problems.Document7 pagesM. H. J. Bollen, Understanding Power Quality Problems.RaviYadavNo ratings yet
- Sensitive AnalysisDocument5 pagesSensitive AnalysisRanjitKumarNo ratings yet
- 2004 BOLLEN Vdips - WT PDFDocument7 pages2004 BOLLEN Vdips - WT PDFMayita ContrerasNo ratings yet
- Mechanical Effects of Short-Circuit Currents Analysis On Autotransformer WindingsDocument4 pagesMechanical Effects of Short-Circuit Currents Analysis On Autotransformer WindingsJunaid YNo ratings yet
- A High-Performance Vector Control of An 11-Level InverterDocument6 pagesA High-Performance Vector Control of An 11-Level Inverterrajeev ranjanNo ratings yet
- High-Resistance Connection Detection in Induction Motor Drives Using Signal InjectionDocument11 pagesHigh-Resistance Connection Detection in Induction Motor Drives Using Signal InjectionBredy LaraNo ratings yet
- Real-Time Detection of Voltage Sags Based On Wavelet TransformDocument6 pagesReal-Time Detection of Voltage Sags Based On Wavelet TransformKarthick Surya100% (1)
- Electric Arc Furnace ModelsDocument7 pagesElectric Arc Furnace ModelsArikson SantanaNo ratings yet
- Instrumentation & Process Control VivaDocument17 pagesInstrumentation & Process Control VivaHarshaNo ratings yet
- Analysis of Voltage Sags Propagation in Electric Power SystemDocument6 pagesAnalysis of Voltage Sags Propagation in Electric Power Systemwashington castro canazaNo ratings yet
- Paper 1Document5 pagesPaper 1ramonenriqueNo ratings yet
- Effect of Unbalanced Voltage On Operation of Induction Motors and Its DetectionDocument4 pagesEffect of Unbalanced Voltage On Operation of Induction Motors and Its DetectionirfandudeNo ratings yet
- PQE 2 MarksDocument8 pagesPQE 2 MarksfvijayamiNo ratings yet
- Overview of Voltage Sag MitigationDocument7 pagesOverview of Voltage Sag MitigationJjjjpfNo ratings yet
- Characterization of Distribution Power Quality Events With Fourier and Wavelet TransformsDocument8 pagesCharacterization of Distribution Power Quality Events With Fourier and Wavelet TransformsRafaelFunesNo ratings yet
- Cálculo Dos Parâmetros para Diferentes Disposições Do Cabo - Hélder (2011)Document6 pagesCálculo Dos Parâmetros para Diferentes Disposições Do Cabo - Hélder (2011)AndréNo ratings yet
- Effects On GIS Parameters On Transient StatisticsDocument4 pagesEffects On GIS Parameters On Transient Statisticssadia_murshad171No ratings yet
- Work RDDS IEL 11923455 622b3fbedc0c6Document6 pagesWork RDDS IEL 11923455 622b3fbedc0c6LIU LINo ratings yet
- Power Transformer Testing and Commissioning PDFDocument6 pagesPower Transformer Testing and Commissioning PDFEric Stanton100% (1)
- 10 1109@tapenergy 2015 7229625Document5 pages10 1109@tapenergy 2015 7229625anupsingh chandelNo ratings yet
- CHAPTER 3A. Voltage Sags and InterruptionDocument53 pagesCHAPTER 3A. Voltage Sags and Interruptiondedi sanatraNo ratings yet
- A Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptDocument8 pagesA Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptGustavo AguayoNo ratings yet
- Impact of Generator and Power Grid On Unit Transformer ReliabilityDocument5 pagesImpact of Generator and Power Grid On Unit Transformer ReliabilityEd ArenasNo ratings yet
- Lec 12 ELL203 23nd Aug 2023Document14 pagesLec 12 ELL203 23nd Aug 2023Agarwal RohitNo ratings yet
- Different Methods of Differentiating Inrush Current From Internal Fault Current in TransformerDocument7 pagesDifferent Methods of Differentiating Inrush Current From Internal Fault Current in TransformerMilovan LukovacNo ratings yet
- Lightning Characterization For Flashover Rate Calculation of Overhead Transmission LinesDocument6 pagesLightning Characterization For Flashover Rate Calculation of Overhead Transmission LinessunitharajababuNo ratings yet
- Power Quality: Unit - 3Document72 pagesPower Quality: Unit - 3eee kalirasu50% (2)
- Power Swing Blocking Function in Distance RelayDocument6 pagesPower Swing Blocking Function in Distance RelayMahmoud AbuziadNo ratings yet
- ITMF 2013 01 Sperling ENUDocument6 pagesITMF 2013 01 Sperling ENUbcqbaoNo ratings yet
- Voltage Sag Distributions CausedDocument9 pagesVoltage Sag Distributions CausedSunil MåüřÿäNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Andysah Putera Utama Siahaan - Fuzzification of College Adviser Proficiency Based On Specific KnowledgeDocument5 pagesAndysah Putera Utama Siahaan - Fuzzification of College Adviser Proficiency Based On Specific KnowledgeRezha YatoNo ratings yet
- Mind Maps For Studying by SlidesgoDocument54 pagesMind Maps For Studying by SlidesgoRezha Yato100% (1)
- Unified Power Quality Conditioner (UPQC) With Voltage Dips and Over-Voltages Compensation CapabilityDocument6 pagesUnified Power Quality Conditioner (UPQC) With Voltage Dips and Over-Voltages Compensation CapabilityRezha YatoNo ratings yet
- Downloads Papers N5b14205f12a38 PDFDocument10 pagesDownloads Papers N5b14205f12a38 PDFRezha YatoNo ratings yet
- Power Quality Improvement by Using DVR Based On Fuzzy Logic ControllerDocument10 pagesPower Quality Improvement by Using DVR Based On Fuzzy Logic ControllerRezha YatoNo ratings yet
- 0684 PDFDocument7 pages0684 PDFRezha YatoNo ratings yet
- IRG4PH50KDocument7 pagesIRG4PH50KRezha YatoNo ratings yet
- Elimination of Voltage Sag/Swell Using Dynamic Voltage RestorerDocument5 pagesElimination of Voltage Sag/Swell Using Dynamic Voltage RestorerRezha YatoNo ratings yet
- Site Visit Report: Project Name - Proposed Educational Building of Degree CollegeDocument2 pagesSite Visit Report: Project Name - Proposed Educational Building of Degree CollegeRajshekhar KategarNo ratings yet
- Sigma A-Cp: Conventional Control PanelDocument2 pagesSigma A-Cp: Conventional Control PanelEngTyranNo ratings yet
- Effekta 90 - DatasheetDocument2 pagesEffekta 90 - DatasheetMahmoud A. SalemNo ratings yet
- Reactor ProtectionDocument25 pagesReactor Protectiongkpalepu90% (10)
- Week 4 - DC DistributionDocument21 pagesWeek 4 - DC DistributionSibghat UllahNo ratings yet
- Planos Electricos Del MV 1000Document13 pagesPlanos Electricos Del MV 1000jhon.lunavNo ratings yet
- REC Presentation PDFDocument13 pagesREC Presentation PDFdeshakmbNo ratings yet
- Performance Evaluation of Alaoji Thermal Power PlantDocument8 pagesPerformance Evaluation of Alaoji Thermal Power PlantIjaems JournalNo ratings yet
- Electrical Thumb Rules - 6Document6 pagesElectrical Thumb Rules - 6Jeya KannanNo ratings yet
- ABB ATS201 ManualDocument32 pagesABB ATS201 ManualDuc Nha NguyenNo ratings yet
- Brainy Eco ManualDocument24 pagesBrainy Eco Manualpramod60720% (1)
- Bat SunStone OPG2-600Document2 pagesBat SunStone OPG2-600Eman EdlesNo ratings yet
- CSB hrl-1280w PDFDocument2 pagesCSB hrl-1280w PDFGustavo BessoneNo ratings yet
- CE1101.d01 Datasheet ESC Velocity USDocument1 pageCE1101.d01 Datasheet ESC Velocity USAdityaNo ratings yet
- Transformer Switching Events031703Document23 pagesTransformer Switching Events031703RicardoNo ratings yet
- C.A 6150 C.A 6160: Test and Certify The Electrical Safety of Your Equipment, in Compliance With European StandardsDocument4 pagesC.A 6150 C.A 6160: Test and Certify The Electrical Safety of Your Equipment, in Compliance With European Standards22_enricoNo ratings yet
- Preliminary Data: IGBT With Antiparallel DiodeDocument8 pagesPreliminary Data: IGBT With Antiparallel DiodeMourad BjijNo ratings yet
- Comparative Statement For Electrical Items For FY 2022-2023 - 0Document20 pagesComparative Statement For Electrical Items For FY 2022-2023 - 0Karma ThinleyNo ratings yet
- Mos Field Effect Transistor: Switching N-Channel Power Mos FetDocument8 pagesMos Field Effect Transistor: Switching N-Channel Power Mos FetbakriramziNo ratings yet
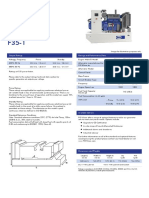
- FG Wilson F35Document4 pagesFG Wilson F35Moncef RedNo ratings yet
- PCBDesign Tutorial Rev ADocument70 pagesPCBDesign Tutorial Rev Asyafruddinr_68006517No ratings yet
- 1306 SCADA System Commissioning Procedure 15.07.16Document9 pages1306 SCADA System Commissioning Procedure 15.07.16Anh Ngọc NguyễnNo ratings yet
- Mid-Term Bekg2433 2021.2022 PDFDocument2 pagesMid-Term Bekg2433 2021.2022 PDFAtamFixItNo ratings yet
- VOL II (Jasidih)Document673 pagesVOL II (Jasidih)ravi shankarNo ratings yet
- N5000 Manual EngDocument76 pagesN5000 Manual EngsunhuynhNo ratings yet
- Full Wave Rectifier: ObjectiveDocument18 pagesFull Wave Rectifier: ObjectiveRajesh UpadhyayNo ratings yet
- TSD Rev 8Document47 pagesTSD Rev 8Sandeep KangNo ratings yet
- PSG 2003Document125 pagesPSG 2003Yung SangNo ratings yet