Download as docx, pdf, or txt
You might also like
- Polygon Mesh Processing Mario Botsch Et - Al 2010 PDFDocument243 pagesPolygon Mesh Processing Mario Botsch Et - Al 2010 PDFAhmed Ramadan100% (3)
- Sleep Study Test: PSG Summary ReportDocument12 pagesSleep Study Test: PSG Summary Reportkuwar palNo ratings yet
- Grade 7 Q2 Health LASDocument46 pagesGrade 7 Q2 Health LASjanet otana100% (1)
- Install HoudiniDocument2 pagesInstall HoudiniChristian CramNo ratings yet
- VFXDocument39 pagesVFXSabahat AzamNo ratings yet
- Kumar - Deep Recurrent Q-Networks For Market Making PDFDocument10 pagesKumar - Deep Recurrent Q-Networks For Market Making PDFStephane MysonaNo ratings yet
- The Fractional Fourier Transform and Its ApplicationsDocument47 pagesThe Fractional Fourier Transform and Its Applicationsscribd99190No ratings yet
- Advances in HapticsDocument732 pagesAdvances in HapticsDavid SalazarNo ratings yet
- CSR Sponsorship LetterDocument4 pagesCSR Sponsorship LetterPeejay Boado75% (4)
- Anaesthesia in Robotic SurgeryDocument32 pagesAnaesthesia in Robotic SurgeryRaguNo ratings yet
- Robotic Surgery: Surgeon ConsoleDocument2 pagesRobotic Surgery: Surgeon ConsoleAvisek DuttaNo ratings yet
- SGAP Presentation MKT and Liquidity Risk ManagementDocument15 pagesSGAP Presentation MKT and Liquidity Risk ManagementDavid IbironkeNo ratings yet
- Minimally Invasive SurgeryDocument13 pagesMinimally Invasive SurgeryShubham Pareshkumar KadiwalaNo ratings yet
- Nodes, Networks and Digital Assets: Houdini FundamentalsDocument16 pagesNodes, Networks and Digital Assets: Houdini FundamentalsRubens Abranches FilhoNo ratings yet
- Minimally Invasive Surgery, RoboticsDocument31 pagesMinimally Invasive Surgery, RoboticsGabriel KlemensNo ratings yet
- Linear Algebra Done Right Test 1Document7 pagesLinear Algebra Done Right Test 1Fady GorgyNo ratings yet
- Robotic Heart SurgeryDocument3 pagesRobotic Heart SurgeryLea ManingdingNo ratings yet
- Vessel Harvesting PDFDocument6 pagesVessel Harvesting PDFV RNo ratings yet
- Robotic SurgeryDocument28 pagesRobotic SurgeryLidhi DileepNo ratings yet
- On RoboticsDocument15 pagesOn RoboticsPradarttana Panda100% (1)
- Sensor Selection Guide KaDocument44 pagesSensor Selection Guide KaShyamsundar MishraNo ratings yet
- Houdini Keyboard Shortcut List v1p1Document8 pagesHoudini Keyboard Shortcut List v1p1sotodadaNo ratings yet
- Anesthesia RoboticDocument39 pagesAnesthesia RoboticGautam khannaNo ratings yet
- Color Rendering Index Calculation PDFDocument2 pagesColor Rendering Index Calculation PDFHarryNo ratings yet
- Visual Effects - Pros and Cons in MoviesDocument8 pagesVisual Effects - Pros and Cons in MoviesAraf MuhammadNo ratings yet
- Augmented Reality in Retail Complete Self-Assessment GuideFrom EverandAugmented Reality in Retail Complete Self-Assessment GuideNo ratings yet
- TensoresDocument40 pagesTensoresMateus Corato Zanarella100% (1)
- JeopardyDocument91 pagesJeopardyNatalia Michel Vivanco BunotNo ratings yet
- An Introduction To Bayesian StatisticsDocument20 pagesAn Introduction To Bayesian Statisticsjamesyu100% (9)
- Mental Ray TutorialDocument20 pagesMental Ray TutorialAnim8erNo ratings yet
- Realflow SplashDocument5 pagesRealflow Splashbomimod100% (2)
- Future of SurgeryDocument21 pagesFuture of SurgeryArun Thangavelu100% (1)
- 1974 Spring - Nevada Outdoors and Wildlife ReviewDocument28 pages1974 Spring - Nevada Outdoors and Wildlife ReviewbrucedcarlsonNo ratings yet
- Professor Emeritus K. S. Spiegler Auth. Principles of Energetics Based On Applications de La Thermodynamique Du Non Équilibre by P. Chartier M. Gross and K. S. Spiegler Springer Verlag Berlin Hei1Document172 pagesProfessor Emeritus K. S. Spiegler Auth. Principles of Energetics Based On Applications de La Thermodynamique Du Non Équilibre by P. Chartier M. Gross and K. S. Spiegler Springer Verlag Berlin Hei1bigdevil11No ratings yet
- Multi Linear Algebra PDFDocument173 pagesMulti Linear Algebra PDFImraansNo ratings yet
- A Path Planning AlgorithmDocument13 pagesA Path Planning Algorithmpi194043100% (1)
- Digital Micrograph User GuideDocument161 pagesDigital Micrograph User GuideEvilus RadaNo ratings yet
- Tuyeras Thesis 1 03 PDFDocument353 pagesTuyeras Thesis 1 03 PDFDaniel AlejandroNo ratings yet
- Example-Based Texture Synthesis On Disney's TangledDocument1 pageExample-Based Texture Synthesis On Disney's Tangled[Jo Bingo]No ratings yet
- Jeopardy Cards - Passive: InventionsDocument3 pagesJeopardy Cards - Passive: InventionsNanaNo ratings yet
- MapleSim (UserGuide) - 001 PDFDocument144 pagesMapleSim (UserGuide) - 001 PDFJosé Luis Haro VeraNo ratings yet
- 4D Printing Technology: A ReviewDocument12 pages4D Printing Technology: A ReviewAfshin KoupaeiNo ratings yet
- Fractals: Siva Sankari, Sathya Meena, Aarthi, Ashok Kumar, Seetharaman Mohamad Habibur RahmanDocument31 pagesFractals: Siva Sankari, Sathya Meena, Aarthi, Ashok Kumar, Seetharaman Mohamad Habibur RahmanManimegalai PrasannaNo ratings yet
- Spatial Swarm GranulationDocument4 pagesSpatial Swarm GranulationCillian DementoNo ratings yet
- Physically Based Rendering, Third Edition From Theory To Implementation PDF DownloadDocument2 pagesPhysically Based Rendering, Third Edition From Theory To Implementation PDF Downloadwang lembak0% (3)
- 3D Geometric Modelling Based On NURBSDocument11 pages3D Geometric Modelling Based On NURBSDodeptrai BkNo ratings yet
- (Bart M. Ter Haar Romeny) Front-End Vision and Multi-Scale Image Analysis - Multi-Scale Computer Vision Theory and Applications (2003)Document470 pages(Bart M. Ter Haar Romeny) Front-End Vision and Multi-Scale Image Analysis - Multi-Scale Computer Vision Theory and Applications (2003)mvannierNo ratings yet
- Mapping a forest or a land: Simply design a 3D plan to create a park, a tree climbing course, a house, a gardenFrom EverandMapping a forest or a land: Simply design a 3D plan to create a park, a tree climbing course, a house, a gardenNo ratings yet
- Ayesha Ali 2016-B-Math-010: Cubic Spline InterpolationDocument12 pagesAyesha Ali 2016-B-Math-010: Cubic Spline InterpolationMaryam BibiNo ratings yet
- Automata-2008 - Theory and Applications of Cellular AutomataDocument636 pagesAutomata-2008 - Theory and Applications of Cellular AutomataCésar Castellanos100% (1)
- De Boor Applied Linear AlgebraDocument191 pagesDe Boor Applied Linear AlgebraTaraNo ratings yet
- Solar Position Algorithm For Solar Radiation Applications: Revised November 2005 - NREL/TP-560-34302Document56 pagesSolar Position Algorithm For Solar Radiation Applications: Revised November 2005 - NREL/TP-560-34302f-conceptNo ratings yet
- (Inverse and Ill-Posed Problems Series) Yu P Petrov - V S Sizikov - Well-Posed, Ill-Posed, and Intermediate Problems With Applications-VSP (2005)Document245 pages(Inverse and Ill-Posed Problems Series) Yu P Petrov - V S Sizikov - Well-Posed, Ill-Posed, and Intermediate Problems With Applications-VSP (2005)youllcito14No ratings yet
- HybridCNN Based Hyperspectral Image Classification Using Multiscalespatiospectral FeaturesDocument10 pagesHybridCNN Based Hyperspectral Image Classification Using Multiscalespatiospectral FeaturesAlkha JayakrishnanNo ratings yet
- Handbook of Computer Vision Algorithms in Image AlgebraDocument384 pagesHandbook of Computer Vision Algorithms in Image Algebraapi-3774889100% (2)
- An Invitation To General Algebra and Invitation To Construction 3.0Document469 pagesAn Invitation To General Algebra and Invitation To Construction 3.0Debraj SarkarNo ratings yet
- E The Master of AllDocument12 pagesE The Master of AllchungNo ratings yet
- Computer Generated Holograms, An Historical ReviewDocument10 pagesComputer Generated Holograms, An Historical ReviewJano Gil LópezNo ratings yet
- TN BH ABA Provider OrientationDocument34 pagesTN BH ABA Provider OrientationVivian ChenNo ratings yet
- Test 1 A: Passage 1: The Natural of YawningDocument40 pagesTest 1 A: Passage 1: The Natural of YawningKelvinNo ratings yet
- Self - Assessment Guide: Can I? YES NODocument3 pagesSelf - Assessment Guide: Can I? YES NOJohn Castillo100% (1)
- Hema Local Post TestDocument6 pagesHema Local Post TestJaymih Santos AbasoloNo ratings yet
- Reconstruction of The EarDocument10 pagesReconstruction of The EarFabian Camelo OtorrinoNo ratings yet
- How Inmates Help Run Philippine Prisons: Current History (New York, N.Y.: 1941) November 2019Document7 pagesHow Inmates Help Run Philippine Prisons: Current History (New York, N.Y.: 1941) November 2019Mekaela DiataNo ratings yet
- Profile PDFDocument1 pageProfile PDFAnnasai PramNo ratings yet
- SWU Orientation Surgery 2Document17 pagesSWU Orientation Surgery 2Jabagat, Benedict Christian P.No ratings yet
- Leadership Roles and Management Functions in Nursing Theory and Application Marquis 8th Edition Test BankDocument10 pagesLeadership Roles and Management Functions in Nursing Theory and Application Marquis 8th Edition Test BankMonicaAcostagzqkx100% (79)
- 25 Exp May 22Document7 pages25 Exp May 22Sharjeel KhanNo ratings yet
- Course Material - Breathing Exercise - For Summer 2020Document4 pagesCourse Material - Breathing Exercise - For Summer 2020emruzzamanNo ratings yet
- Anterior Open BiteDocument7 pagesAnterior Open BiteGowri100% (1)
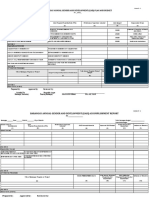
- Barangay Annual Gender and Development (Gad) Plan and BudgetDocument2 pagesBarangay Annual Gender and Development (Gad) Plan and BudgetYham-Lloyd AbordoNo ratings yet
- Bioethics ReportDocument30 pagesBioethics ReportCharrise VoluntadNo ratings yet
- Assignment Individual Section 42Document3 pagesAssignment Individual Section 42Afiqah YusriNo ratings yet
- Ajol File Journals - 414 - Articles - 216263 - Submission - Proof - 216263 4933 532792 1 10 20211019Document5 pagesAjol File Journals - 414 - Articles - 216263 - Submission - Proof - 216263 4933 532792 1 10 20211019Daashinta RajadurayNo ratings yet
- The Primary Years Programme (PYP)Document5 pagesThe Primary Years Programme (PYP)Sorin Iordache100% (1)
- Maintenance: Mcgraw-Hill/IrwinDocument17 pagesMaintenance: Mcgraw-Hill/IrwinkondusamyNo ratings yet
- Ncm-116-Auditory-Disturbances 2Document24 pagesNcm-116-Auditory-Disturbances 2aaaawakandaNo ratings yet
- Otolith Function and DisordersDocument139 pagesOtolith Function and DisordersAlbert Gheorghe100% (1)
- Mental Health at Workplace PDFDocument51 pagesMental Health at Workplace PDFReach Manam100% (1)
- Jack NewsDocument33 pagesJack NewskndaruNo ratings yet
- Advanced Nutrition Test 2023 PDFDocument3 pagesAdvanced Nutrition Test 2023 PDFajjaNo ratings yet
- Nursing Research Society of India - Nursing Research and Statistics-Pearson Education (2013)Document416 pagesNursing Research Society of India - Nursing Research and Statistics-Pearson Education (2013)piyush0751100% (1)
- Icf - College - Syllabus - 2022-2023 - Purposive CommunicationDocument6 pagesIcf - College - Syllabus - 2022-2023 - Purposive CommunicationSkill Plus Review Center PaniquiNo ratings yet
- Taking and Recording Patient ObservationDocument5 pagesTaking and Recording Patient ObservationChoi Ra YoungNo ratings yet
- Emotional SobrietyDocument2 pagesEmotional SobrietyUrsulaNo ratings yet