
EE5407 Tutorial Band-Limited Linear Filter Channels and Equalisation
EE5407 Tutorial Band-Limited Linear Filter Channels and Equalisation
You might also like
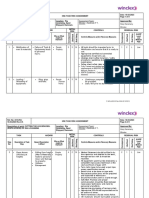
- 2318-RA 18.03.2023-REV 0A Cutting The Leg Bracing - RIG Rig LovansingDocument9 pages2318-RA 18.03.2023-REV 0A Cutting The Leg Bracing - RIG Rig LovansingHafeez AliNo ratings yet
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 pageECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidNo ratings yet
- EE 220: Signals, Systems & Networks Tutorial-6Document5 pagesEE 220: Signals, Systems & Networks Tutorial-6Pratiksha SinghNo ratings yet
- Massachusetts Institute of TechnologyDocument4 pagesMassachusetts Institute of TechnologyJohnNo ratings yet
- HW 1 SolutionsDocument5 pagesHW 1 Solutions123 abcNo ratings yet
- First Order Homogeneous Linear Systems With Constant CoefficientsDocument15 pagesFirst Order Homogeneous Linear Systems With Constant CoefficientsakshayNo ratings yet
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocument4 pagesEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNo ratings yet
- Extremal TraceDocument16 pagesExtremal TraceMouliNo ratings yet
- PHYS 381 W23 Assignment 4Document8 pagesPHYS 381 W23 Assignment 4Nathan NgoNo ratings yet
- Problem Set 7Document3 pagesProblem Set 7AjayGhunawatNo ratings yet
- CH605 2023 24tutorial3Document2 pagesCH605 2023 24tutorial3NeerajNo ratings yet
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDocument9 pagesChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqNo ratings yet
- A00 Final PracticeDocument4 pagesA00 Final PracticeTalha EtnerNo ratings yet
- Exercise 6: Probability and Random Processes For Signals and SystemsDocument2 pagesExercise 6: Probability and Random Processes For Signals and SystemsGpNo ratings yet
- OSE801 Engineering System IdentificationDocument20 pagesOSE801 Engineering System IdentificationsamNo ratings yet
- A02 Exam2 - 2013answersDocument6 pagesA02 Exam2 - 2013answersTalha EtnerNo ratings yet
- ECON 809: Problem Set 1Document18 pagesECON 809: Problem Set 1Phan Van NamNo ratings yet
- Lecture32 PDFDocument5 pagesLecture32 PDFMar BallesterosNo ratings yet
- Zhi Wei SUN CONJECTURESDocument39 pagesZhi Wei SUN CONJECTURESKpevikaa YaoNo ratings yet
- Signals and SystemsDocument10 pagesSignals and SystemsKiruthika AlagarNo ratings yet
- Analysis of An Upwind Finite-Difference Scheme ForDocument9 pagesAnalysis of An Upwind Finite-Difference Scheme ForAndrés Felipe Vélez AcevedoNo ratings yet
- CombiningDocument5 pagesCombiningShafayat AbrarNo ratings yet
- Free Damped Ex3Document4 pagesFree Damped Ex3Rozanne TingNo ratings yet
- Loss Systems and Delay Systems 28883 0Document14 pagesLoss Systems and Delay Systems 28883 0Muallimatul kamilaNo ratings yet
- Section A: Pure MathematicsDocument6 pagesSection A: Pure MathematicsMohammed ArslaanNo ratings yet
- Assignment 6Document3 pagesAssignment 6sekharNo ratings yet
- Mat334 TD7Document5 pagesMat334 TD7jethrotabueNo ratings yet
- Week6 Assignment SolutionsDocument14 pagesWeek6 Assignment Solutionsvicky.sajnaniNo ratings yet
- ReportDocument9 pagesReportBexultan MustafinNo ratings yet
- Chino Poisson 1dDocument8 pagesChino Poisson 1dLeonel MoralesNo ratings yet
- HomeworkDocument4 pagesHomeworkFredrick OduorNo ratings yet
- Discrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersDocument12 pagesDiscrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersRo HenNo ratings yet
- Partikel Dalam KotakDocument16 pagesPartikel Dalam KotakAsmayanti GufranNo ratings yet
- HW 4Document2 pagesHW 4RocisneRocisneNo ratings yet
- PAS204: Lecture 16. The Neyman-Pearson Lemma: 16.1 Two Simple HypothesesDocument8 pagesPAS204: Lecture 16. The Neyman-Pearson Lemma: 16.1 Two Simple HypothesesasdollaNo ratings yet
- Section A: Pure Mathematics: X + 2 Cos X + 1Document6 pagesSection A: Pure Mathematics: X + 2 Cos X + 1hmphryNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- Quiz 1Document3 pagesQuiz 1AnupNo ratings yet
- Taylor Coefficients and Series Involving Harmonic NumbersDocument24 pagesTaylor Coefficients and Series Involving Harmonic NumbersKpevikaa YaoNo ratings yet
- R2 Ch5 SolnsDocument12 pagesR2 Ch5 Solnsgod AlykhanNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Interval Method For Interval Linear Program: Mathematical Communications 23Document11 pagesInterval Method For Interval Linear Program: Mathematical Communications 23danielNo ratings yet
- Exercicios Resolvidos Parte 3Document35 pagesExercicios Resolvidos Parte 3Lucas Venâncio da Silva SantosNo ratings yet
- 2.classical Mechanics - GATE PDFDocument18 pages2.classical Mechanics - GATE PDFneha patelNo ratings yet
- Computational Linear Algebra - Problem Set 7Document2 pagesComputational Linear Algebra - Problem Set 7ashok kumarNo ratings yet
- 7230 HW2 PDFDocument3 pages7230 HW2 PDFAnonymous 5bQS8ErIoNo ratings yet
- ONLA Exam F2021-AllDocument13 pagesONLA Exam F2021-Alls-kariem.ragabNo ratings yet
- Cgnotes PDFDocument11 pagesCgnotes PDFBijaya PandeyNo ratings yet
- Linear Least-SquaresDocument7 pagesLinear Least-SquaresSiddhartha KulkarniNo ratings yet
- EstimationDocument16 pagesEstimationfatihaNo ratings yet
- 97 Matysiak Przewozniak RulinskaDocument7 pages97 Matysiak Przewozniak RulinskaTaffohouo Nwaffeu Yves ValdezNo ratings yet
- 1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Document8 pages1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Pushkaraj PanseNo ratings yet
- Solution For Final Examination: (2.0 Marks)Document4 pagesSolution For Final Examination: (2.0 Marks)Tùng HoàngNo ratings yet
- MICexam PDFDocument1 pageMICexam PDFCesar Andres Sierra PardoNo ratings yet
- Chapter 6Document11 pagesChapter 6Murali KNo ratings yet
- ProblemsDocument5 pagesProblemsAhasan RidoyNo ratings yet
- Cse4214 Chapter3 Part2 Activities 2Document6 pagesCse4214 Chapter3 Part2 Activities 2vietNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Ropa2000 307Document4 pagesRopa2000 307HORACIONo ratings yet
- Physics F4 C2 Sasbadi Workbook-AnswersDocument5 pagesPhysics F4 C2 Sasbadi Workbook-AnswersRebecca Choong Xin HuiNo ratings yet
- Shifting DetailsDocument2 pagesShifting Detailskamal rajkumarNo ratings yet
- FAQ Lecture 1Document5 pagesFAQ Lecture 1Richard De Medeiros Castro100% (1)
- Citric Acid SDS PestellDocument5 pagesCitric Acid SDS PestellTrisNo ratings yet
- User Manual: Ac750 Wifi RouterDocument138 pagesUser Manual: Ac750 Wifi RouterKevin KimNo ratings yet
- Fetal BehaviourDocument1 pageFetal BehaviourJuan José Espinoza OsoresNo ratings yet
- The 8086 MicroprocessorDocument15 pagesThe 8086 MicroprocessorAnas SaNo ratings yet
- Ac BDVDocument12 pagesAc BDVUhhoj JjxhkNo ratings yet
- 1986 GT CatalogDocument16 pages1986 GT CatalogtspinnerNo ratings yet
- Maxwell Intro 17.0 SP WS5.2 Workshop Instructions Magneto Transient 3D PDFDocument22 pagesMaxwell Intro 17.0 SP WS5.2 Workshop Instructions Magneto Transient 3D PDFzhang881907No ratings yet
- DETECTOR - Service ManualDocument40 pagesDETECTOR - Service ManualOrlando Velado100% (1)
- Chemistry Exam Q ADocument14 pagesChemistry Exam Q AmateialesandraNo ratings yet
- Solubility and EquilibriaDocument35 pagesSolubility and EquilibriaYosephine Intan AyuningtyasNo ratings yet
- Global Ethical Issues Unit 3Document15 pagesGlobal Ethical Issues Unit 3aditi anandNo ratings yet
- Index: High-Grade KeyboardDocument15 pagesIndex: High-Grade KeyboardDavid Emanuel Dauo0% (1)
- Centrifugal Pumps - Engineering LibraryDocument9 pagesCentrifugal Pumps - Engineering LibraryHedi Ben MohamedNo ratings yet
- FB-1 - Beam Detector Specification PDFDocument1 pageFB-1 - Beam Detector Specification PDFRafiq MagdyNo ratings yet
- Design of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsDocument5 pagesDesign of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsijcnesNo ratings yet
- UEFA B - Technical InformationDocument85 pagesUEFA B - Technical InformationILO 007No ratings yet
- Pro Tip Catalogue 4 07Document28 pagesPro Tip Catalogue 4 07notengofffNo ratings yet
- OTC-24958 MEIDP Owen Fracture Zone CrossingDocument16 pagesOTC-24958 MEIDP Owen Fracture Zone CrossingFrds123No ratings yet
- Countrys ClimateDocument20 pagesCountrys ClimateErika Jayne100% (1)
- PolynomialsDocument44 pagesPolynomialsSumit ManeNo ratings yet
- Specification Sheet NETBOX Profilebox 01Document2 pagesSpecification Sheet NETBOX Profilebox 01Kian Keong YeeNo ratings yet
- Swamy JPC-CDocument33 pagesSwamy JPC-Cvishnu shankerNo ratings yet
- PDFDocument41 pagesPDFRonak SolgamaNo ratings yet
- 1 Soal PrediksiDocument371 pages1 Soal PrediksiJanuar IrawanNo ratings yet
- T50e Replace DriveDocument24 pagesT50e Replace DrivevcalderonvNo ratings yet
























































































Download as pdf or txt
You might also like
- 2318-RA 18.03.2023-REV 0A Cutting The Leg Bracing - RIG Rig LovansingDocument9 pages2318-RA 18.03.2023-REV 0A Cutting The Leg Bracing - RIG Rig LovansingHafeez AliNo ratings yet
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 pageECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidNo ratings yet
- EE 220: Signals, Systems & Networks Tutorial-6Document5 pagesEE 220: Signals, Systems & Networks Tutorial-6Pratiksha SinghNo ratings yet
- Massachusetts Institute of TechnologyDocument4 pagesMassachusetts Institute of TechnologyJohnNo ratings yet
- HW 1 SolutionsDocument5 pagesHW 1 Solutions123 abcNo ratings yet
- First Order Homogeneous Linear Systems With Constant CoefficientsDocument15 pagesFirst Order Homogeneous Linear Systems With Constant CoefficientsakshayNo ratings yet
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocument4 pagesEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNo ratings yet
- Extremal TraceDocument16 pagesExtremal TraceMouliNo ratings yet
- PHYS 381 W23 Assignment 4Document8 pagesPHYS 381 W23 Assignment 4Nathan NgoNo ratings yet
- Problem Set 7Document3 pagesProblem Set 7AjayGhunawatNo ratings yet
- CH605 2023 24tutorial3Document2 pagesCH605 2023 24tutorial3NeerajNo ratings yet
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDocument9 pagesChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqNo ratings yet
- A00 Final PracticeDocument4 pagesA00 Final PracticeTalha EtnerNo ratings yet
- Exercise 6: Probability and Random Processes For Signals and SystemsDocument2 pagesExercise 6: Probability and Random Processes For Signals and SystemsGpNo ratings yet
- OSE801 Engineering System IdentificationDocument20 pagesOSE801 Engineering System IdentificationsamNo ratings yet
- A02 Exam2 - 2013answersDocument6 pagesA02 Exam2 - 2013answersTalha EtnerNo ratings yet
- ECON 809: Problem Set 1Document18 pagesECON 809: Problem Set 1Phan Van NamNo ratings yet
- Lecture32 PDFDocument5 pagesLecture32 PDFMar BallesterosNo ratings yet
- Zhi Wei SUN CONJECTURESDocument39 pagesZhi Wei SUN CONJECTURESKpevikaa YaoNo ratings yet
- Signals and SystemsDocument10 pagesSignals and SystemsKiruthika AlagarNo ratings yet
- Analysis of An Upwind Finite-Difference Scheme ForDocument9 pagesAnalysis of An Upwind Finite-Difference Scheme ForAndrés Felipe Vélez AcevedoNo ratings yet
- CombiningDocument5 pagesCombiningShafayat AbrarNo ratings yet
- Free Damped Ex3Document4 pagesFree Damped Ex3Rozanne TingNo ratings yet
- Loss Systems and Delay Systems 28883 0Document14 pagesLoss Systems and Delay Systems 28883 0Muallimatul kamilaNo ratings yet
- Section A: Pure MathematicsDocument6 pagesSection A: Pure MathematicsMohammed ArslaanNo ratings yet
- Assignment 6Document3 pagesAssignment 6sekharNo ratings yet
- Mat334 TD7Document5 pagesMat334 TD7jethrotabueNo ratings yet
- Week6 Assignment SolutionsDocument14 pagesWeek6 Assignment Solutionsvicky.sajnaniNo ratings yet
- ReportDocument9 pagesReportBexultan MustafinNo ratings yet
- Chino Poisson 1dDocument8 pagesChino Poisson 1dLeonel MoralesNo ratings yet
- HomeworkDocument4 pagesHomeworkFredrick OduorNo ratings yet
- Discrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersDocument12 pagesDiscrete-Time Modeling and Analysis of Pulse-Width-Modulated Switched Power ConvertersRo HenNo ratings yet
- Partikel Dalam KotakDocument16 pagesPartikel Dalam KotakAsmayanti GufranNo ratings yet
- HW 4Document2 pagesHW 4RocisneRocisneNo ratings yet
- PAS204: Lecture 16. The Neyman-Pearson Lemma: 16.1 Two Simple HypothesesDocument8 pagesPAS204: Lecture 16. The Neyman-Pearson Lemma: 16.1 Two Simple HypothesesasdollaNo ratings yet
- Section A: Pure Mathematics: X + 2 Cos X + 1Document6 pagesSection A: Pure Mathematics: X + 2 Cos X + 1hmphryNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- Quiz 1Document3 pagesQuiz 1AnupNo ratings yet
- Taylor Coefficients and Series Involving Harmonic NumbersDocument24 pagesTaylor Coefficients and Series Involving Harmonic NumbersKpevikaa YaoNo ratings yet
- R2 Ch5 SolnsDocument12 pagesR2 Ch5 Solnsgod AlykhanNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Interval Method For Interval Linear Program: Mathematical Communications 23Document11 pagesInterval Method For Interval Linear Program: Mathematical Communications 23danielNo ratings yet
- Exercicios Resolvidos Parte 3Document35 pagesExercicios Resolvidos Parte 3Lucas Venâncio da Silva SantosNo ratings yet
- 2.classical Mechanics - GATE PDFDocument18 pages2.classical Mechanics - GATE PDFneha patelNo ratings yet
- Computational Linear Algebra - Problem Set 7Document2 pagesComputational Linear Algebra - Problem Set 7ashok kumarNo ratings yet
- 7230 HW2 PDFDocument3 pages7230 HW2 PDFAnonymous 5bQS8ErIoNo ratings yet
- ONLA Exam F2021-AllDocument13 pagesONLA Exam F2021-Alls-kariem.ragabNo ratings yet
- Cgnotes PDFDocument11 pagesCgnotes PDFBijaya PandeyNo ratings yet
- Linear Least-SquaresDocument7 pagesLinear Least-SquaresSiddhartha KulkarniNo ratings yet
- EstimationDocument16 pagesEstimationfatihaNo ratings yet
- 97 Matysiak Przewozniak RulinskaDocument7 pages97 Matysiak Przewozniak RulinskaTaffohouo Nwaffeu Yves ValdezNo ratings yet
- 1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Document8 pages1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Pushkaraj PanseNo ratings yet
- Solution For Final Examination: (2.0 Marks)Document4 pagesSolution For Final Examination: (2.0 Marks)Tùng HoàngNo ratings yet
- MICexam PDFDocument1 pageMICexam PDFCesar Andres Sierra PardoNo ratings yet
- Chapter 6Document11 pagesChapter 6Murali KNo ratings yet
- ProblemsDocument5 pagesProblemsAhasan RidoyNo ratings yet
- Cse4214 Chapter3 Part2 Activities 2Document6 pagesCse4214 Chapter3 Part2 Activities 2vietNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Ropa2000 307Document4 pagesRopa2000 307HORACIONo ratings yet
- Physics F4 C2 Sasbadi Workbook-AnswersDocument5 pagesPhysics F4 C2 Sasbadi Workbook-AnswersRebecca Choong Xin HuiNo ratings yet
- Shifting DetailsDocument2 pagesShifting Detailskamal rajkumarNo ratings yet
- FAQ Lecture 1Document5 pagesFAQ Lecture 1Richard De Medeiros Castro100% (1)
- Citric Acid SDS PestellDocument5 pagesCitric Acid SDS PestellTrisNo ratings yet
- User Manual: Ac750 Wifi RouterDocument138 pagesUser Manual: Ac750 Wifi RouterKevin KimNo ratings yet
- Fetal BehaviourDocument1 pageFetal BehaviourJuan José Espinoza OsoresNo ratings yet
- The 8086 MicroprocessorDocument15 pagesThe 8086 MicroprocessorAnas SaNo ratings yet
- Ac BDVDocument12 pagesAc BDVUhhoj JjxhkNo ratings yet
- 1986 GT CatalogDocument16 pages1986 GT CatalogtspinnerNo ratings yet
- Maxwell Intro 17.0 SP WS5.2 Workshop Instructions Magneto Transient 3D PDFDocument22 pagesMaxwell Intro 17.0 SP WS5.2 Workshop Instructions Magneto Transient 3D PDFzhang881907No ratings yet
- DETECTOR - Service ManualDocument40 pagesDETECTOR - Service ManualOrlando Velado100% (1)
- Chemistry Exam Q ADocument14 pagesChemistry Exam Q AmateialesandraNo ratings yet
- Solubility and EquilibriaDocument35 pagesSolubility and EquilibriaYosephine Intan AyuningtyasNo ratings yet
- Global Ethical Issues Unit 3Document15 pagesGlobal Ethical Issues Unit 3aditi anandNo ratings yet
- Index: High-Grade KeyboardDocument15 pagesIndex: High-Grade KeyboardDavid Emanuel Dauo0% (1)
- Centrifugal Pumps - Engineering LibraryDocument9 pagesCentrifugal Pumps - Engineering LibraryHedi Ben MohamedNo ratings yet
- FB-1 - Beam Detector Specification PDFDocument1 pageFB-1 - Beam Detector Specification PDFRafiq MagdyNo ratings yet
- Design of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsDocument5 pagesDesign of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsijcnesNo ratings yet
- UEFA B - Technical InformationDocument85 pagesUEFA B - Technical InformationILO 007No ratings yet
- Pro Tip Catalogue 4 07Document28 pagesPro Tip Catalogue 4 07notengofffNo ratings yet
- OTC-24958 MEIDP Owen Fracture Zone CrossingDocument16 pagesOTC-24958 MEIDP Owen Fracture Zone CrossingFrds123No ratings yet
- Countrys ClimateDocument20 pagesCountrys ClimateErika Jayne100% (1)
- PolynomialsDocument44 pagesPolynomialsSumit ManeNo ratings yet
- Specification Sheet NETBOX Profilebox 01Document2 pagesSpecification Sheet NETBOX Profilebox 01Kian Keong YeeNo ratings yet
- Swamy JPC-CDocument33 pagesSwamy JPC-Cvishnu shankerNo ratings yet
- PDFDocument41 pagesPDFRonak SolgamaNo ratings yet
- 1 Soal PrediksiDocument371 pages1 Soal PrediksiJanuar IrawanNo ratings yet
- T50e Replace DriveDocument24 pagesT50e Replace DrivevcalderonvNo ratings yet