Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Bayesian Bertrand ModelDocument2 pagesBayesian Bertrand ModelMuralidharNo ratings yet
- Automatic Language Identification in Texts A SurveDocument104 pagesAutomatic Language Identification in Texts A SurveAV MediaNo ratings yet
- Solving Arithmetic Mathematical Word Problems: A Review and Recent AdvancementsDocument20 pagesSolving Arithmetic Mathematical Word Problems: A Review and Recent AdvancementsAV MediaNo ratings yet
- Ocr For Hindi Using NLPDocument25 pagesOcr For Hindi Using NLPAV MediaNo ratings yet
- Artificial Intelligence Format For Mini Project Synopsis: Title PageDocument1 pageArtificial Intelligence Format For Mini Project Synopsis: Title PageAV MediaNo ratings yet
- Detecting Morphed Face ImagesDocument7 pagesDetecting Morphed Face ImagesAV MediaNo ratings yet
- Production SystemsDocument14 pagesProduction SystemsAV MediaNo ratings yet
- Artificial Intelligence (AI) Chatbot As Language Learning Medium: An InquiryDocument7 pagesArtificial Intelligence (AI) Chatbot As Language Learning Medium: An InquiryAV MediaNo ratings yet
- Guideline Regimen TB Ro 2019 PDFDocument61 pagesGuideline Regimen TB Ro 2019 PDFrima melliaNo ratings yet
- 2011+FEID OnlineallDocument160 pages2011+FEID OnlineallMeghhsNo ratings yet
- Technical Elements: Curb AppealDocument1 pageTechnical Elements: Curb AppealerkkreNo ratings yet
- PRAKTEK ANALYTICAL TEXT - Alya Tsany mukhbita.01.XI MIPA 4Document3 pagesPRAKTEK ANALYTICAL TEXT - Alya Tsany mukhbita.01.XI MIPA 4Alya tsany mukhbitaNo ratings yet
- CF Lecture 09 - Anti Forensics Techniques Part 2Document38 pagesCF Lecture 09 - Anti Forensics Techniques Part 2Faisal ShahzadNo ratings yet
- Fin358 Individual Assignment Nur Hazani 2020818012Document12 pagesFin358 Individual Assignment Nur Hazani 2020818012nur hazaniNo ratings yet
- Learning Guide 14: Animal Health Care Service NTQF Level-IVDocument41 pagesLearning Guide 14: Animal Health Care Service NTQF Level-IVRafez JoneNo ratings yet
- CP Spring Scale POGIL 2012 2013Document4 pagesCP Spring Scale POGIL 2012 2013Anthony ButlerNo ratings yet
- Declared Performance/sDocument1 pageDeclared Performance/sLjiljana MiskovicNo ratings yet
- MSC Accounting and Finance: ProgrammesDocument24 pagesMSC Accounting and Finance: ProgrammesalbehadiNo ratings yet
- 0510 Y20 SP 2Document14 pages0510 Y20 SP 2nellytusiimeNo ratings yet
- Biology Infographics: Here Is Where This Template BeginsDocument34 pagesBiology Infographics: Here Is Where This Template BeginsYusfida Mariatul HusnaNo ratings yet
- MGT202 Lecture 06.ppsxDocument17 pagesMGT202 Lecture 06.ppsxBashir AhmadNo ratings yet
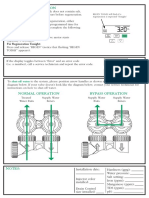
- Manual Regeneration: Shut-Off Water Bypass OperationDocument2 pagesManual Regeneration: Shut-Off Water Bypass OperationcaroNo ratings yet
- MS Excel Practical QuestionsDocument5 pagesMS Excel Practical QuestionsStricker ManNo ratings yet
- Investigations of Some Properties of Oxysulphate of Magnesium by Admixing Zinc Oxide As An AdditiveDocument6 pagesInvestigations of Some Properties of Oxysulphate of Magnesium by Admixing Zinc Oxide As An AdditiveIJRASETPublicationsNo ratings yet
- Digital Image and Video Processing Nov 2022Document5 pagesDigital Image and Video Processing Nov 2022khushiduppalaNo ratings yet
- AssignmentDocument4 pagesAssignmentDenzel ChiuseniNo ratings yet
- Transmission Gate Characteristics: DS DSDocument17 pagesTransmission Gate Characteristics: DS DSradeonleonNo ratings yet
- Intalacion de PiezometrosDocument14 pagesIntalacion de Piezometrosjoeldlrosa0No ratings yet
- 10 MeasuringDevicesPowerMonitoring LV10 042020 EN 202006081510359865Document36 pages10 MeasuringDevicesPowerMonitoring LV10 042020 EN 202006081510359865hamed hamamNo ratings yet
- Diet PDFDocument11 pagesDiet PDFAarcamNo ratings yet
- Ligia - Balbino Assignment 1 Version 2Document4 pagesLigia - Balbino Assignment 1 Version 2liesil100% (1)
- Purposive Communication Hand OutsDocument3 pagesPurposive Communication Hand OutsBhoxzs Mel Ikaw Lng0% (1)
- Disable Print Screen Key and All Keyboard Keys in ASP - Net PageDocument3 pagesDisable Print Screen Key and All Keyboard Keys in ASP - Net PagekhundaliniNo ratings yet
- Compliance CalendarDocument12 pagesCompliance CalendarAshish MallickNo ratings yet
- The Art of Safety Auditing A Tutorial For Regulators (Sasho Andonov (Author) )Document213 pagesThe Art of Safety Auditing A Tutorial For Regulators (Sasho Andonov (Author) )Ximena Manchego RosadoNo ratings yet
- ANSWER KEY - English For CareersDocument3 pagesANSWER KEY - English For CareersalwinalexanderNo ratings yet
- WerpapointDocument14 pagesWerpapointPaula Mae RubialesNo ratings yet