Download as pdf or txt
You might also like
- Design To Prevent Floor Vibrations-Thomas M. MurrayDocument6 pagesDesign To Prevent Floor Vibrations-Thomas M. Murrayernesto1901No ratings yet
- Reinforced Concrete Buildings: Behavior and DesignFrom EverandReinforced Concrete Buildings: Behavior and DesignRating: 5 out of 5 stars5/5 (1)
- All Metal Test CertificateDocument8 pagesAll Metal Test Certificatenaveenprasad100% (1)
- 737Document20 pages737Kaushik SenguptaNo ratings yet
- Design of Concrete Oors For Vibration: September 2019Document8 pagesDesign of Concrete Oors For Vibration: September 2019mist ce19No ratings yet
- Minimum Slab Thickness Requirement of RCC Slab in Order To Prevent Undesirable Floor VibrationDocument4 pagesMinimum Slab Thickness Requirement of RCC Slab in Order To Prevent Undesirable Floor Vibrationminhthanha6No ratings yet
- Pushover Analysis On Multistory BuildingDocument14 pagesPushover Analysis On Multistory BuildingayuvinaNo ratings yet
- Stress Distribution and Dynamic Testing in Relation To Road DesignDocument28 pagesStress Distribution and Dynamic Testing in Relation To Road DesignEDWIN ALEXANDER LEMUS BALLESTEROS100% (1)
- How Accurate Are Current Floor Vibration Analysis Procedure PDFDocument14 pagesHow Accurate Are Current Floor Vibration Analysis Procedure PDFdestructural313No ratings yet
- Omar Caballero2021-Garatache-Methods For The Vibration Analysis of Reinforced Concrete Precast One-Way Joist Slab Floor Systems Under Human WalkingDocument22 pagesOmar Caballero2021-Garatache-Methods For The Vibration Analysis of Reinforced Concrete Precast One-Way Joist Slab Floor Systems Under Human WalkingxuyujouNo ratings yet
- Mohammad Rakibul Islam Khan, Zafrul Hakim Khan, Mohammad Fahim Raiyan and Khan Mahmud AmanatDocument14 pagesMohammad Rakibul Islam Khan, Zafrul Hakim Khan, Mohammad Fahim Raiyan and Khan Mahmud AmanatShoyeeb AhmedNo ratings yet
- New D Esign C Riterion For W Alking V IbrationsDocument3 pagesNew D Esign C Riterion For W Alking V Ibrationshaoude9No ratings yet
- Elastic MountsDocument18 pagesElastic MountspaulomarezeNo ratings yet
- Insertion Loss Models For Evaluating The PerformanDocument9 pagesInsertion Loss Models For Evaluating The Performansoumyajit maityNo ratings yet
- AcceptabilityDocument9 pagesAcceptabilityRodrigo AmpueroNo ratings yet
- Wcee2012 2080 PDFDocument8 pagesWcee2012 2080 PDFHemant SonawadekarNo ratings yet
- 138 PAPER Lowes CGB Edited VersionDocument17 pages138 PAPER Lowes CGB Edited VersionHesham EdressNo ratings yet
- ICSV10 mfmh2Document8 pagesICSV10 mfmh2danielNo ratings yet
- Tuned Mass Dampers Composite Floor 2010 by CompanyDocument9 pagesTuned Mass Dampers Composite Floor 2010 by CompanyfdrtewwwwNo ratings yet
- Experimental Analysis of A Shake Table Test of Timber-Framed Structures With Stone and Earth InfillDocument13 pagesExperimental Analysis of A Shake Table Test of Timber-Framed Structures With Stone and Earth Infillflo_24_11No ratings yet
- Evaluation of Load Transfer and Strut Strength of Deep BeamDocument12 pagesEvaluation of Load Transfer and Strut Strength of Deep BeamProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNo ratings yet
- Influence of Masonry Infill Panels On The Vibration and Stiffness Characteristics of RC Frame BuildingsDocument5 pagesInfluence of Masonry Infill Panels On The Vibration and Stiffness Characteristics of RC Frame BuildingsandrepujaNo ratings yet
- Al Agha 2021Document10 pagesAl Agha 2021Qorry OktaliaNo ratings yet
- Pile Model Tests Using Strain Gauge Technology: DOI: 10.1515/sgem-2015-0032Document4 pagesPile Model Tests Using Strain Gauge Technology: DOI: 10.1515/sgem-2015-0032Emir OkucuNo ratings yet
- Damage Detection Using Vibration MeasurementsDocument7 pagesDamage Detection Using Vibration MeasurementsHÙNG Trần MạnhNo ratings yet
- Accidental Design Eccentricity Is It Important For The Inelastic Response of Buildings To Strong EarthquakesDocument16 pagesAccidental Design Eccentricity Is It Important For The Inelastic Response of Buildings To Strong EarthquakesmohamedNo ratings yet
- Predicting Footfall Induced Vibration PaDocument8 pagesPredicting Footfall Induced Vibration PaChristopher ArtymNo ratings yet
- Development of A Digitally-Controlled 3-Axis Earthquake Shake TableDocument26 pagesDevelopment of A Digitally-Controlled 3-Axis Earthquake Shake TableHuzaifa U FarooqNo ratings yet
- 4.5 Other ApplicationsDocument8 pages4.5 Other ApplicationsAna María Reyes PresidiaNo ratings yet
- Design and Behavior of Zipper-Braced Fra PDFDocument9 pagesDesign and Behavior of Zipper-Braced Fra PDFpercyarevaloNo ratings yet
- TN290 Vibrations 0125142Document28 pagesTN290 Vibrations 0125142Trade TradNo ratings yet
- Zhao Et Al 2018 Reduction of Ground Borne Vibrations From Rail Lines On Viaducts by Means of Elastic Anti Vibration MatsDocument16 pagesZhao Et Al 2018 Reduction of Ground Borne Vibrations From Rail Lines On Viaducts by Means of Elastic Anti Vibration MatsC.majiid CumarNo ratings yet
- Impact Testing of Concrete Using A Drop-Weight Impact MachineDocument8 pagesImpact Testing of Concrete Using A Drop-Weight Impact MachineFABIAN FIENGONo ratings yet
- Dynamic Design Analysis of Electrical Bus Runs and Supports To Withstand EarthquakesDocument8 pagesDynamic Design Analysis of Electrical Bus Runs and Supports To Withstand Earthquakessaikiran1074No ratings yet
- Objectives and Scope of The StudyDocument10 pagesObjectives and Scope of The StudyMM OrvinNo ratings yet
- Batilas Et Al. 2020Document6 pagesBatilas Et Al. 2020jamNo ratings yet
- Vibration Absorption and Isolation in Dynamically Loaded FoundationsDocument8 pagesVibration Absorption and Isolation in Dynamically Loaded Foundationssarakiani2012No ratings yet
- Iset 438Document13 pagesIset 438Nona AnnisaNo ratings yet
- Seismic Design of Composite Metal Deck and Concrete Filled Diaphragms A Discussion Paper Cowie Hicks Macrae Clifton FussellDocument11 pagesSeismic Design of Composite Metal Deck and Concrete Filled Diaphragms A Discussion Paper Cowie Hicks Macrae Clifton Fussellmongkol_1001No ratings yet
- Jose 12-2017 KRRDocument11 pagesJose 12-2017 KRRYogesh BansalNo ratings yet
- J3. (EESD) Eqe.3397 - Finite Element Analysis of The Seismic Shake-Table Response of A Rocking Podium StructureDocument8 pagesJ3. (EESD) Eqe.3397 - Finite Element Analysis of The Seismic Shake-Table Response of A Rocking Podium StructureMyron ZhongNo ratings yet
- Sampleproblems FEDocument6 pagesSampleproblems FEnial69100% (1)
- Civil EngineeringDocument10 pagesCivil EngineeringMudasir HussainNo ratings yet
- Design Aids For Walking Vibrations in Steel Framed FloorsDocument20 pagesDesign Aids For Walking Vibrations in Steel Framed Floorsdestructural313No ratings yet
- Shaking Table Test Study On Seismic Performance of Concrete Arch Bridge With Steel WebDocument9 pagesShaking Table Test Study On Seismic Performance of Concrete Arch Bridge With Steel WebangelomarinilliNo ratings yet
- Project SynopsisDocument24 pagesProject SynopsisselvaganeshNo ratings yet
- Effect of Infill Wall Stiffness Variations On The Behavior of Reinforced Concrete Frames Under Earthquake DemandsDocument11 pagesEffect of Infill Wall Stiffness Variations On The Behavior of Reinforced Concrete Frames Under Earthquake DemandsGalal El-DarratNo ratings yet
- Controlling Floor Vibration With Active PDFDocument19 pagesControlling Floor Vibration With Active PDFDaniel LamNo ratings yet
- A New Approach To Floor Vibration AnalysisDocument7 pagesA New Approach To Floor Vibration AnalysisTiago CastelaniNo ratings yet
- Imperfection Sensitivity of Plate Girder Webs Under Patch LoadingDocument6 pagesImperfection Sensitivity of Plate Girder Webs Under Patch LoadingAsdrubal AyestaránNo ratings yet
- ARABICDocument33 pagesARABICAamir BalochNo ratings yet
- Spe68420 CT FracDocument12 pagesSpe68420 CT FracizzybjNo ratings yet
- ADAPT TN290 Vibration AnalysisDocument20 pagesADAPT TN290 Vibration AnalysisNanthakumarNo ratings yet
- The Staggered Truss System-Structural Considerations: John B. ScalziDocument6 pagesThe Staggered Truss System-Structural Considerations: John B. Scalzisaber javidNo ratings yet
- Parative Study On Seismic Performance of Flat Slab and Conventional SlabDocument6 pagesParative Study On Seismic Performance of Flat Slab and Conventional Slabaji raNo ratings yet
- ADAPT TN290 Vibration AnalysisDocument20 pagesADAPT TN290 Vibration AnalysisMai KawayapanikNo ratings yet
- CD Paper Pag 337Document10 pagesCD Paper Pag 337Anonymous lEBdswQXmxNo ratings yet
- From Microstructure Investigations to Multiscale Modeling: Bridging the GapFrom EverandFrom Microstructure Investigations to Multiscale Modeling: Bridging the GapDelphine BrancherieNo ratings yet
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- Engineering Vibroacoustic Analysis: Methods and ApplicationsFrom EverandEngineering Vibroacoustic Analysis: Methods and ApplicationsStephen A. HambricNo ratings yet
- KSB Residur Ceramic Bearings, Property FileDocument2 pagesKSB Residur Ceramic Bearings, Property FileJasmina TepšaNo ratings yet
- Himel Productos 70 9Document13 pagesHimel Productos 70 9eng.ahmed.radwanNo ratings yet
- Refresher Notes - Plumbing Code: Master Plumber Lisensure ExamDocument15 pagesRefresher Notes - Plumbing Code: Master Plumber Lisensure ExamDanica Jane Sajol100% (3)
- ACHE Fin Fan TechDocument15 pagesACHE Fin Fan TechAnonymous 8Mc8boONNo ratings yet
- The Zeroth Law of ThermodynamicsDocument2 pagesThe Zeroth Law of ThermodynamicsBahrilNo ratings yet
- Kompaktor Product Line Arc MS: The Specialist For Customer-Specific SolutionsDocument6 pagesKompaktor Product Line Arc MS: The Specialist For Customer-Specific SolutionsJoão BaptistaNo ratings yet
- Pile Foundation:: Basic ConceptsDocument57 pagesPile Foundation:: Basic ConceptsKiprono VincentNo ratings yet
- BMRCL 32M 001Document1 pageBMRCL 32M 001DOMNo ratings yet
- Assignment 3 PDFDocument7 pagesAssignment 3 PDFRima ChinnasamyNo ratings yet
- Tyco - Sintakote - Design - Manual - Nov2004editionDocument140 pagesTyco - Sintakote - Design - Manual - Nov2004editionmottmac50% (2)
- Vize - Bahar 2022Document6 pagesVize - Bahar 2022FrkanNo ratings yet
- High Performance N8090Document1 pageHigh Performance N8090FirstLastNo ratings yet
- Det Ails of Expansion Joint in Concrete Carriagewa Y: Highways DepartmentDocument1 pageDet Ails of Expansion Joint in Concrete Carriagewa Y: Highways Departmentcho673524No ratings yet
- ACI-350 P-M Interaction 1.1Document6 pagesACI-350 P-M Interaction 1.1Edgardo ArriesgadoNo ratings yet
- 3 WO Copper NickelDocument78 pages3 WO Copper NickelAnonymous Kr13NEBNo ratings yet
- Syllabus5 6sem and Scheme7 8sem Wef 2016Document65 pagesSyllabus5 6sem and Scheme7 8sem Wef 2016Mayur PKNo ratings yet
- Bluescope LysaghtDocument88 pagesBluescope LysaghtGajah MadaNo ratings yet
- SSRN Id4492574Document16 pagesSSRN Id4492574Sai KrishnaNo ratings yet
- 13 Very Important Type Tests of A Low Voltage Switchgear Carried Out by The ManufacturerDocument10 pages13 Very Important Type Tests of A Low Voltage Switchgear Carried Out by The ManufacturerAhmed BoussoffaraNo ratings yet
- Traditional Construction Techniques in Himachal PradeshDocument2 pagesTraditional Construction Techniques in Himachal PradeshAmbar PastNo ratings yet
- Advanced Pump DiagnosticsDocument8 pagesAdvanced Pump DiagnosticsSteven A McMurrayNo ratings yet
- Ytg A 1013Document147 pagesYtg A 1013Said Marino CarrascoNo ratings yet
- Geotechnical GEO5 Fem enDocument2 pagesGeotechnical GEO5 Fem encesmanroe231No ratings yet
- 104.GB 8076-2008Document27 pages104.GB 8076-2008Winnjone YinNo ratings yet
- خواص صخور المكمن رقم 9Document31 pagesخواص صخور المكمن رقم 9maamoun ramyNo ratings yet
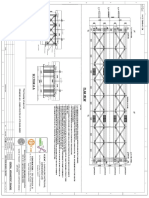
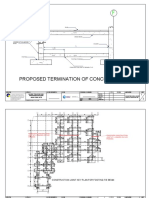
- Proposed Termination of Concrete PouringDocument2 pagesProposed Termination of Concrete Pouringnathan raninNo ratings yet
- Which of The Following Simple Mechanical Machine With The Ability To Increase An Applied Force?Document105 pagesWhich of The Following Simple Mechanical Machine With The Ability To Increase An Applied Force?Caro Kan LopezNo ratings yet
- SD Reinforcing Mesh Q131Document12 pagesSD Reinforcing Mesh Q131Mohand EliassNo ratings yet