Download as pdf or txt
You might also like
- Module 6.9 TLEDocument115 pagesModule 6.9 TLEroseavy90% (10)
- RTOS Based Embedded System DesignDocument16 pagesRTOS Based Embedded System DesignSagar DhapkeNo ratings yet
- A Note On Polynomial Interpolation at The Chebyshev Extrema NodesDocument10 pagesA Note On Polynomial Interpolation at The Chebyshev Extrema NodesFlorinNo ratings yet
- A New Technique of Initial Boundary Value Problems Using Adomian Decomposition MethodDocument16 pagesA New Technique of Initial Boundary Value Problems Using Adomian Decomposition MethodKanthavel ThillaiNo ratings yet
- On Imbedding Theorems For Weighted Anisotropic Sobolev SpacesDocument13 pagesOn Imbedding Theorems For Weighted Anisotropic Sobolev SpacesLuis Alberto FuentesNo ratings yet
- Hydrodynamics in Two Dimensions and Vortex Theory : PhysicsDocument22 pagesHydrodynamics in Two Dimensions and Vortex Theory : Physicsyijat18183No ratings yet
- The Regular Attractor For The Reaction-Diffusion System With A Nonlinearity Rapidly Oscillating in Time and Its AveragingDocument60 pagesThe Regular Attractor For The Reaction-Diffusion System With A Nonlinearity Rapidly Oscillating in Time and Its AveragingSebas ValladaresNo ratings yet
- Evaluation of GFRP and Hybrid Reinforced ConcreteDocument9 pagesEvaluation of GFRP and Hybrid Reinforced ConcreteGideon AmedumeNo ratings yet
- Math s4 v2 Article-31Document20 pagesMath s4 v2 Article-31insightstudios33No ratings yet
- Approximation of Critical FrequencyDocument10 pagesApproximation of Critical FrequencyNurul IslamNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- Geometry of Multiple Zeta ValuesDocument9 pagesGeometry of Multiple Zeta ValuesqwertyNo ratings yet
- Keywords: Method of Molecular Dynamics, Symplectic Difference Schemes, Energy ConservationDocument24 pagesKeywords: Method of Molecular Dynamics, Symplectic Difference Schemes, Energy ConservationDolzMaGiCzNo ratings yet
- Di 2016Document7 pagesDi 2016Chương Quách VănNo ratings yet
- Communications On Pure and Applied Analysis Volume 10, Number 5, September 2011Document16 pagesCommunications On Pure and Applied Analysis Volume 10, Number 5, September 2011Uli Urio-LegoNo ratings yet
- A Two-Step Jacobi-Type Iterative M e T H o D: Computers Math. Applic. Vol. 34, No. 1, Pp. 1-9, 1997Document9 pagesA Two-Step Jacobi-Type Iterative M e T H o D: Computers Math. Applic. Vol. 34, No. 1, Pp. 1-9, 1997omed abdullahNo ratings yet
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- On The Exponential Solution of Differential Equations For A Linear Operator PDFDocument25 pagesOn The Exponential Solution of Differential Equations For A Linear Operator PDFzhihong zuoNo ratings yet
- Solutions of Navier Equations and Their Representation StructureDocument44 pagesSolutions of Navier Equations and Their Representation StructureManuel ComparettiNo ratings yet
- QFT KleinGordonDocument71 pagesQFT KleinGordonbob n sauveNo ratings yet
- 10.1007@s11785 019 00924 ZDocument19 pages10.1007@s11785 019 00924 ZKarwan JwamerNo ratings yet
- On The Minimal Polynomial of A Resolvent: Elektrotehnieki Fakultet Vnska 3, P.B. 170 Zagreb, YugoslaviaDocument9 pagesOn The Minimal Polynomial of A Resolvent: Elektrotehnieki Fakultet Vnska 3, P.B. 170 Zagreb, YugoslaviaPedro Antonio Marrone GaudianoNo ratings yet
- 1986, Extension of Jones' Theory On Index To Arbitrary Factors, KosakiDocument18 pages1986, Extension of Jones' Theory On Index To Arbitrary Factors, KosakiSurajit BiswasNo ratings yet
- Properties of A Semi-Discrete Approximation To The Beam EquationDocument11 pagesProperties of A Semi-Discrete Approximation To The Beam EquationjtorerocNo ratings yet
- V.Mazya_Asymptpotic expansion of the eigenvalues of BVPDocument26 pagesV.Mazya_Asymptpotic expansion of the eigenvalues of BVPGerman LozadaNo ratings yet
- An Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorDocument19 pagesAn Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorHua WangNo ratings yet
- Modified Deflation Algorithm For The Solution of Singular Problems. I. A System of Nonlinear Algebraic EquationsDocument23 pagesModified Deflation Algorithm For The Solution of Singular Problems. I. A System of Nonlinear Algebraic EquationsAnonymous zDHwfez7NCNo ratings yet
- Resolvent Estimates For The Stokes Operator On An Infinite LayerDocument30 pagesResolvent Estimates For The Stokes Operator On An Infinite LayerGiuseppe CocliteNo ratings yet
- Partial Differential Equations Example Sheet 1: BooksDocument6 pagesPartial Differential Equations Example Sheet 1: BooksNasih AhmadNo ratings yet
- Stochastic LecturesDocument8 pagesStochastic LecturesomidbundyNo ratings yet
- Invariants of Characteristics of Some Systems of Partial Differential EquationsDocument13 pagesInvariants of Characteristics of Some Systems of Partial Differential EquationsAnimesh SahaNo ratings yet
- Annaby 2005Document24 pagesAnnaby 2005AndreNo ratings yet
- 1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.AcadDocument6 pages1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.Acadmm.mm.mabcmNo ratings yet
- Táboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Document17 pagesTáboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Nolbert Yonel Morales TineoNo ratings yet
- A Vector Partial Differential Equation Model For Air PollutionDocument5 pagesA Vector Partial Differential Equation Model For Air PollutionYorkNo ratings yet
- FQT2023 2Document5 pagesFQT2023 2muay88No ratings yet
- Booklet PDFDocument73 pagesBooklet PDFESHETUNo ratings yet
- Bifurcation Theory Wo ParametersDocument15 pagesBifurcation Theory Wo ParametersJohn StarrettNo ratings yet
- Jr. FRDocument2 pagesJr. FROlaNo ratings yet
- LP Estimates For The Cauchy Problem With Applications To The Navier-Stokes Equations in Exterior DomainsDocument23 pagesLP Estimates For The Cauchy Problem With Applications To The Navier-Stokes Equations in Exterior DomainsHassan ZmourNo ratings yet
- Hilbert Transform CalculationDocument18 pagesHilbert Transform Calculationpulises2No ratings yet
- A Method For DeterminingDocument12 pagesA Method For DeterminingLeonardo JaimesNo ratings yet
- Spinrad. Graph Theory (Book Draft)Document7 pagesSpinrad. Graph Theory (Book Draft)lecuongttbkNo ratings yet
- A Differentiable Manifold With F-Structure of Rank RDocument14 pagesA Differentiable Manifold With F-Structure of Rank Rismail benaliNo ratings yet
- AngmomDocument29 pagesAngmomYılmaz ÇolakNo ratings yet
- The Derivative of A Tensor-Valued Function of A Tensor : ANNE HOGER (Carnegie-Mellon University)Document15 pagesThe Derivative of A Tensor-Valued Function of A Tensor : ANNE HOGER (Carnegie-Mellon University)Emil SánchezNo ratings yet
- Simmetries and Recursion Operators For Solution EquationDocument19 pagesSimmetries and Recursion Operators For Solution Equationdnse90900No ratings yet
- 2 Re Investigation of Large Amplitude Free Vibrations of Beams Using Finite ElementsDocument5 pages2 Re Investigation of Large Amplitude Free Vibrations of Beams Using Finite ElementsHamid M SedighiNo ratings yet
- Correlation in Random VariablesDocument6 pagesCorrelation in Random VariablesMadhu Babu SikhaNo ratings yet
- Lecture 2 ECE 4thDocument17 pagesLecture 2 ECE 4thAditya SharmaNo ratings yet
- The Runge-Kutta MethodDocument9 pagesThe Runge-Kutta MethodSlavka JadlovskaNo ratings yet
- Solving Nonlinear Equations From Higher Order Derivations in Linear StagesDocument24 pagesSolving Nonlinear Equations From Higher Order Derivations in Linear StagesAzhar Ali ZafarNo ratings yet
- On The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredDocument15 pagesOn The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredPepe ChupinNo ratings yet
- S. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsDocument13 pagesS. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsLekkellNo ratings yet
- Local Generalization of Pauli's TheoremDocument19 pagesLocal Generalization of Pauli's TheoremInforma.azNo ratings yet
- Booklet 2012Document69 pagesBooklet 2012Esteban RodríguezNo ratings yet
- Schweber 1962Document17 pagesSchweber 1962Ray MondoNo ratings yet
- Annals of MathematicsDocument12 pagesAnnals of Mathematicskehao chengNo ratings yet
- Exercises For TFFY54Document25 pagesExercises For TFFY54sattar28No ratings yet
- Special Train Algebras Arising in Genetics: by H. GonshorDocument13 pagesSpecial Train Algebras Arising in Genetics: by H. GonshorGABRIEL GUMARAESNo ratings yet
- Random ProcessDocument21 pagesRandom ProcessgkmkkNo ratings yet
- Yashoda Singh Indian Coins Lots 1001-1242Document29 pagesYashoda Singh Indian Coins Lots 1001-1242Ashwin SevariaNo ratings yet
- Schindler Escalator 9700AE - Brake MaintenanceDocument4 pagesSchindler Escalator 9700AE - Brake MaintenanceHùng VĩNo ratings yet
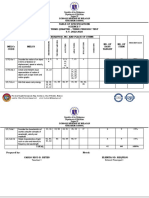
- Q3-TOS Science 7Document2 pagesQ3-TOS Science 7Carlo Rico ReyesNo ratings yet
- Nosler 6mm-BR-Remington-55grDocument1 pageNosler 6mm-BR-Remington-55grToxophilus TheLuckyNo ratings yet
- A Note On Ethics and StrategyDocument3 pagesA Note On Ethics and StrategyLaura RamonaNo ratings yet
- Srilanka UpdatedDocument6 pagesSrilanka UpdatedBaba HeadquaterNo ratings yet
- Official Resume PDFDocument4 pagesOfficial Resume PDFBrendan LarsenNo ratings yet
- Advanced Baking 1Document61 pagesAdvanced Baking 1Judelmae SisonNo ratings yet
- User ConsentDocument3 pagesUser ConsentvikuvishnuvikuNo ratings yet
- Golden Gate PDFDocument42 pagesGolden Gate PDFJose David Vivas AbrilNo ratings yet
- MIT Insight Report On (Chemistry) Industry DigitalizationDocument21 pagesMIT Insight Report On (Chemistry) Industry DigitalizationEllezah Dela CruzNo ratings yet
- Sabam Sariaman CVDocument1 pageSabam Sariaman CVsabamsiregarNo ratings yet
- 19 8 English+Manual+Rt 3Document249 pages19 8 English+Manual+Rt 3aleba1975No ratings yet
- Upper Primary Division Competition Paper: ThursdayDocument10 pagesUpper Primary Division Competition Paper: ThursdayOlga Rudenko BradfordNo ratings yet
- Group 3 - Strategies For Classroom ManagementDocument25 pagesGroup 3 - Strategies For Classroom ManagementSiti AisyahNo ratings yet
- Central Administration Building: Technical Specifications General DiscriptionDocument7 pagesCentral Administration Building: Technical Specifications General DiscriptionDarcy stylesNo ratings yet
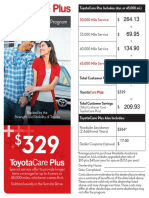
- ToyotaCare Plus CalculationDocument2 pagesToyotaCare Plus CalculationShao MaNo ratings yet
- Expt. 8 Salivary DigestionDocument25 pagesExpt. 8 Salivary DigestionLESLIE JANE BALUYOS JALANo ratings yet
- 104 2022 220 EyDocument30 pages104 2022 220 EyJason BramwellNo ratings yet
- Bullock Cart: Aarushree KhobragadeDocument13 pagesBullock Cart: Aarushree KhobragadeAzure MidoriyaNo ratings yet
- Wifi LBS - CiscoDocument206 pagesWifi LBS - Cisconassr_ismailNo ratings yet
- FOSFA Technical Manual Oils and FatsDocument15 pagesFOSFA Technical Manual Oils and FatsNurhayati SurbaktiNo ratings yet
- 65018-1A - Rev 0 - QSF 75 65018-1A Parts ManualDocument52 pages65018-1A - Rev 0 - QSF 75 65018-1A Parts Manualandrei20041No ratings yet
- Guide Raotm2014 JakartaDocument23 pagesGuide Raotm2014 JakartarajavinugmailcomNo ratings yet
- The Metaphysics of The Upanishads VicharDocument461 pagesThe Metaphysics of The Upanishads VicharAyush GaikwadNo ratings yet
- The Brain and Nervous System (Psychology) Unit 14: An Academic ReportDocument7 pagesThe Brain and Nervous System (Psychology) Unit 14: An Academic ReportOlatokunbo SinaayomiNo ratings yet
- The Wild BunchDocument2 pagesThe Wild BuncharnoldNo ratings yet
- Wordlist Unit 3 PDFDocument3 pagesWordlist Unit 3 PDFYea boyNo ratings yet