Download as txt, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Anatomy of The EyeDocument3 pagesThe Anatomy of The EyeChezcaDionisioNo ratings yet
- Carta de Munsell - Munsell Color ChartDocument15 pagesCarta de Munsell - Munsell Color ChartIsabela KyrillosNo ratings yet
- Psychology: (8th Edition) David MyersDocument58 pagesPsychology: (8th Edition) David MyersAdesh Nidhi TiwaryNo ratings yet
- RALDocument1 pageRALQCNo ratings yet
- Introduction To CVIPDocument33 pagesIntroduction To CVIPGetachew Yizengaw EnyewNo ratings yet
- Holographic Interface of The Human BrainDocument11 pagesHolographic Interface of The Human BrainBronnikov Method100% (1)
- Pricelist HippocampusDocument20 pagesPricelist HippocampusFannNo ratings yet
- Bharathiyar College of Engineering and TechnologyDocument26 pagesBharathiyar College of Engineering and TechnologyHãrîNo ratings yet
- Catalogo - Tommy Hilfiger - 2024Document106 pagesCatalogo - Tommy Hilfiger - 2024Ezequiel OjedaNo ratings yet
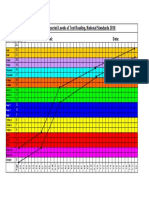
- Wedge Graph - Expected Levels of Text Reading, National Standards 2010 School: DateDocument1 pageWedge Graph - Expected Levels of Text Reading, National Standards 2010 School: Dateapi-26776334No ratings yet
- Internship-Report-Sharath PalleDocument16 pagesInternship-Report-Sharath PalleSharath PalleNo ratings yet
- Importance of Transportation 111Document12 pagesImportance of Transportation 111Noreumi KimNo ratings yet
- Chapter 3 Sensation & Perception (A)Document13 pagesChapter 3 Sensation & Perception (A)Sidra.kNo ratings yet
- Exceptional Children FinalDocument42 pagesExceptional Children FinalRohit Kumar100% (1)
- Educ 1 - Low VisionDocument7 pagesEduc 1 - Low VisionGabriel Nico A. PaquibotNo ratings yet
- Teacher's Manual For Adapting Science Experiments For Blind and Visually Impaired StudentsDocument64 pagesTeacher's Manual For Adapting Science Experiments For Blind and Visually Impaired StudentsmazesolutionNo ratings yet
- TOEFLDocument4 pagesTOEFLLidyaNo ratings yet
- Notes in Art (Lines and Colors)Document6 pagesNotes in Art (Lines and Colors)Trashy kawaNo ratings yet
- Campbell, John (2012) - Lichtenberg and The Cogito (12p)Document12 pagesCampbell, John (2012) - Lichtenberg and The Cogito (12p)BlodhostaNo ratings yet
- Book 1Document4 pagesBook 1wayne huangNo ratings yet
- Paletar Steag Sasi Schema AccentDocument4 pagesPaletar Steag Sasi Schema AccentTaka TomoNo ratings yet
- Title Proposal Final Ever EverDocument4 pagesTitle Proposal Final Ever EvergwynsandyNo ratings yet
- Lesson 6: Brain, Intelligence and Thinking in AdolescenceDocument2 pagesLesson 6: Brain, Intelligence and Thinking in AdolescenceJames MariñasNo ratings yet
- Job Analysis Questionnaire PDFDocument10 pagesJob Analysis Questionnaire PDFCong Phuong AnhNo ratings yet
- BlueControl BrochureDocument3 pagesBlueControl BrochureionNo ratings yet
- Colors of Light-Wps OfficeDocument3 pagesColors of Light-Wps OfficeReymond PerezNo ratings yet
- ACC AutoDocument1 pageACC AutoKMTEC Prudente Movel1No ratings yet
- Art Takes On Religion: Michelangelo PistolettoDocument3 pagesArt Takes On Religion: Michelangelo PistolettoAndres KalNo ratings yet
- Hartong 2006Document15 pagesHartong 2006ppapapNo ratings yet
- Turvey-Jean Epstein Cinema of ImmanenceDocument27 pagesTurvey-Jean Epstein Cinema of ImmanenceFernandaLemeNo ratings yet