Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hollander - HF Oscillation Shunt Vs PearsonDocument19 pagesHollander - HF Oscillation Shunt Vs PearsonGiancarloRichardRivadeneyraMirandaNo ratings yet
- 09 Optimal ZVS Modulation EvertsDocument18 pages09 Optimal ZVS Modulation EvertsGiancarloRichardRivadeneyraMirandaNo ratings yet
- HX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005Document48 pagesHX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005GiancarloRichardRivadeneyraMirandaNo ratings yet
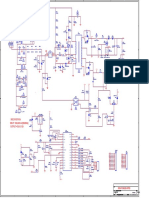
- 5800-P24QB-WP20-C (Electric Diagram) 2012.9.13Document1 page5800-P24QB-WP20-C (Electric Diagram) 2012.9.13GiancarloRichardRivadeneyraMirandaNo ratings yet
- Guía UART de PS4 - Wiki de ReparaciónDocument9 pagesGuía UART de PS4 - Wiki de ReparaciónGiancarloRichardRivadeneyraMiranda50% (2)
- Lector de Bus de Datos IÂ CDocument4 pagesLector de Bus de Datos IÂ CGiancarloRichardRivadeneyraMiranda100% (1)
- United States Patent: (10) Patent No.: (45) Date of PatentDocument23 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentGiancarloRichardRivadeneyraMirandaNo ratings yet
- SN75LVDS88PFD Texas InstrumentsDocument12 pagesSN75LVDS88PFD Texas InstrumentsGiancarloRichardRivadeneyraMirandaNo ratings yet
- THAN0060 Rev.1.50 EDocument12 pagesTHAN0060 Rev.1.50 EGiancarloRichardRivadeneyraMirandaNo ratings yet
- Service Manual: Auto WasherDocument42 pagesService Manual: Auto WasherGiancarloRichardRivadeneyraMirandaNo ratings yet
- 1200/1152/1080/960-Output TFT LCD Gate Driver: Fitipower Integrated Technology IncDocument26 pages1200/1152/1080/960-Output TFT LCD Gate Driver: Fitipower Integrated Technology IncGiancarloRichardRivadeneyraMirandaNo ratings yet
- Sunlord: Wire Wound SMD Power Inductors - SWPA SeriesDocument20 pagesSunlord: Wire Wound SMD Power Inductors - SWPA SeriesGiancarloRichardRivadeneyraMirandaNo ratings yet
- N - Channel Enhancement Mode " Single Feature Size " Power MosfetDocument9 pagesN - Channel Enhancement Mode " Single Feature Size " Power MosfetGiancarloRichardRivadeneyraMirandaNo ratings yet
- Battery Data Sheet Model: 564-276Document1 pageBattery Data Sheet Model: 564-276GiancarloRichardRivadeneyraMirandaNo ratings yet
- FA1A60N/FA6B20N: Enhanced Efficiency With Dual ICDocument2 pagesFA1A60N/FA6B20N: Enhanced Efficiency With Dual ICGiancarloRichardRivadeneyraMirandaNo ratings yet
- Led TV: Service ManualDocument89 pagesLed TV: Service ManualGiancarloRichardRivadeneyraMiranda100% (1)
- Kickstarting Your PCB Design With Partquest: W W W - P A D S - C o MDocument8 pagesKickstarting Your PCB Design With Partquest: W W W - P A D S - C o MGiancarloRichardRivadeneyraMirandaNo ratings yet
- 05 - High Speed Interface Various Applications - LG전자 - 홍국태 발표자료 - HS Interface - V10Document51 pages05 - High Speed Interface Various Applications - LG전자 - 홍국태 발표자료 - HS Interface - V10GiancarloRichardRivadeneyraMirandaNo ratings yet
- Samsung-Ps43e400 Service ManualDocument66 pagesSamsung-Ps43e400 Service ManualGiancarloRichardRivadeneyraMiranda88% (8)
- SVC - Intervals Vertical Bar - 160422Document4 pagesSVC - Intervals Vertical Bar - 160422GiancarloRichardRivadeneyraMirandaNo ratings yet
- ZXGD3005E6: 25V 10A Gate Driver in Sot26Document8 pagesZXGD3005E6: 25V 10A Gate Driver in Sot26Manoel BonfimNo ratings yet
- Avago ACPL-339J Driving and Protecting IGBTs Article - v4 (Final)Document4 pagesAvago ACPL-339J Driving and Protecting IGBTs Article - v4 (Final)Arvind NangareNo ratings yet
- Advanced Mechatronics SystemsDocument13 pagesAdvanced Mechatronics Systemssaleem razaNo ratings yet
- Data Sheet TOP210PFIDocument16 pagesData Sheet TOP210PFIlobitoferozlNo ratings yet
- Fully Integrated PMIC For Safety-Related SystemsDocument42 pagesFully Integrated PMIC For Safety-Related SystemsFurkan Berk KayaNo ratings yet
- Control Integrated Power System (Cipos™) Igcm06B60Ga: DatasheetDocument16 pagesControl Integrated Power System (Cipos™) Igcm06B60Ga: Datasheetjose luisNo ratings yet
- Power Management GuideDocument121 pagesPower Management GuidelibertadorpmvNo ratings yet
- Max17126 Max17126a PDFDocument34 pagesMax17126 Max17126a PDFVukica IvicNo ratings yet
- 795F AC Drive Train Poster 2Document1 page795F AC Drive Train Poster 2Luis Jhonathan Lazo AbrilNo ratings yet
- ACS800 Electronic BoardsDocument27 pagesACS800 Electronic BoardsPuneet Joshi100% (1)
- ISL6263C IntersilDocument18 pagesISL6263C IntersilCer CerNo ratings yet
- Vehicle BLDC PTVTDocument87 pagesVehicle BLDC PTVTBộ Môn DieuKhienhocNo ratings yet
- Ir 2156Document24 pagesIr 2156anon_702708521No ratings yet
- (Att) 4471Document46 pages(Att) 4471contateste123No ratings yet
- Application Note: MicrocontrollersDocument20 pagesApplication Note: MicrocontrollersAdailton SantosNo ratings yet
- Hybrid IC IGBT Gate Driver + DC/DC Converter VLA500K-01RDocument6 pagesHybrid IC IGBT Gate Driver + DC/DC Converter VLA500K-01RdevchandarNo ratings yet
- IGBT DriversDocument13 pagesIGBT Driverssdio06No ratings yet
- AP3041 Ic Driver Placa Simply Syled37i Que Se QuemaDocument14 pagesAP3041 Ic Driver Placa Simply Syled37i Que Se QuemaAndres Alegria0% (1)
- 5V/12V Synchronous-Rectified Buck Controller With Reference InputDocument19 pages5V/12V Synchronous-Rectified Buck Controller With Reference InputIgor LabutinNo ratings yet
- Low Frequency Transformer Based SOHO UPS Design: AN - 1910 - PL15 - 1910 - 001345Document69 pagesLow Frequency Transformer Based SOHO UPS Design: AN - 1910 - PL15 - 1910 - 001345Sugeng HariadiNo ratings yet
- Infineon-Gate Driver ICs For EV Charging Stations and Wallboxes-ProductPresentation-V02 00-EnDocument8 pagesInfineon-Gate Driver ICs For EV Charging Stations and Wallboxes-ProductPresentation-V02 00-EnAbdulraheem SalmanNo ratings yet
- High-Efficiency, Quad-Output, Main Power Supply Controllers For Notebook Computers FeaturesDocument35 pagesHigh-Efficiency, Quad-Output, Main Power Supply Controllers For Notebook Computers FeaturesAndré da HoraNo ratings yet
- TMC6100 Datasheet Rev1.03Document41 pagesTMC6100 Datasheet Rev1.03Max INo ratings yet
- ncp5901 r2 OnDocument10 pagesncp5901 r2 OnakashNo ratings yet
- Energies: Design and Implementation of A Low-Power Low-Cost Digital Current-Sink Electronic LoadDocument14 pagesEnergies: Design and Implementation of A Low-Power Low-Cost Digital Current-Sink Electronic LoadciccioNo ratings yet
- FOD3180 2A Output Current, High Speed MOSFET Gate Driver OptocouplerDocument17 pagesFOD3180 2A Output Current, High Speed MOSFET Gate Driver OptocouplerAliandoNo ratings yet
- Infineon 6EDL04X0XXX DataSheet v02 08 EN-3160006Document22 pagesInfineon 6EDL04X0XXX DataSheet v02 08 EN-3160006Paresh PanchalNo ratings yet
- AP8263Document10 pagesAP8263SamerNo ratings yet
- PI IGBT ProductCatalog PDFDocument52 pagesPI IGBT ProductCatalog PDFanand shekhawatNo ratings yet
- Final Report Project #26 Induction Heater For Melting AluminumDocument64 pagesFinal Report Project #26 Induction Heater For Melting Aluminumlight yagamiNo ratings yet