Download as pdf or txt
You might also like
- MPC 200 OmDocument113 pagesMPC 200 OmVasiliy Terekhov100% (6)
- Yard Patrol From 108' Concept To DeliveryDocument22 pagesYard Patrol From 108' Concept To Deliverybrenno100% (1)
- Jmse 08 00897 v3Document26 pagesJmse 08 00897 v3Renatto Yupa VillanuevaNo ratings yet
- Hossein+Nouroozi+i+1+in. PMRes 2020 1Document12 pagesHossein+Nouroozi+i+1+in. PMRes 2020 1Thibault HugNo ratings yet
- Hydrodynamic Efficiency Improvement of The High Skew Propeller For The Underwater Vehicle Under Surface and Submerged ConditionsDocument2 pagesHydrodynamic Efficiency Improvement of The High Skew Propeller For The Underwater Vehicle Under Surface and Submerged Conditionsomid123123123No ratings yet
- 1 s2.0 S2092678216305118 MainDocument10 pages1 s2.0 S2092678216305118 MainDhanang Reza PradicaNo ratings yet
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Mi150167 2017 PDFDocument11 pagesMi150167 2017 PDFPepito PerezNo ratings yet
- Das2019 PDFDocument15 pagesDas2019 PDFJian XuNo ratings yet
- DES-based Computation of The Flow Around The Darpa SuboffDocument10 pagesDES-based Computation of The Flow Around The Darpa SuboffShahbazNo ratings yet
- Tb2-2-Bi - Performance Investigation of Ducted Aerodynamic PropulsorsDocument11 pagesTb2-2-Bi - Performance Investigation of Ducted Aerodynamic PropulsorsklopakNo ratings yet
- Optimization of A Diver Propulsion Vehicle Hydrodynamics Parameter and Its' Shape Improvement by CFD Method For Improving Underwater Speed RecordDocument10 pagesOptimization of A Diver Propulsion Vehicle Hydrodynamics Parameter and Its' Shape Improvement by CFD Method For Improving Underwater Speed RecordSudarshan MadeswaranNo ratings yet
- Sciencedirect: A Numerical Case Study: Bovet Approach To Design A Francis Turbine RunnerDocument10 pagesSciencedirect: A Numerical Case Study: Bovet Approach To Design A Francis Turbine RunnerFilip StojkovskiNo ratings yet
- Numerical Analysis of Full-Scale Ship Self-Propulsion Performance With Direct Comparison To Statistical Sea Trail ResultsDocument22 pagesNumerical Analysis of Full-Scale Ship Self-Propulsion Performance With Direct Comparison To Statistical Sea Trail ResultsAJAY LAKSHAMANANNo ratings yet
- From Single To Multistage Marine Propulsor A FullyDocument12 pagesFrom Single To Multistage Marine Propulsor A FullySaeed JavdaniNo ratings yet
- Numerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilDocument7 pagesNumerical Analysis of Effect of Leading-Edge Rotating Cylinder On NACA0021 Symmetric AirfoilArjuna arjunNo ratings yet
- Marine Propeller Design Using CFD ToolsDocument9 pagesMarine Propeller Design Using CFD ToolsadinaNo ratings yet
- InTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicDocument22 pagesInTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicMol MolNo ratings yet
- Performance Analysis and Comparison of High Lift Airfoil For Low-Speed Unmanned Aerial VehicleDocument6 pagesPerformance Analysis and Comparison of High Lift Airfoil For Low-Speed Unmanned Aerial VehicleMd Abdullah Al KhosruNo ratings yet
- Aerodynamic Characteristics of A Novel Catapult Launched Morphing Tandem-Wing Unmanned Aerial VehicleDocument16 pagesAerodynamic Characteristics of A Novel Catapult Launched Morphing Tandem-Wing Unmanned Aerial VehicleGiang BùiNo ratings yet
- Design and Analysis of A Fixed-Wing Unmanned Aerial-Aquatic VehicleDocument8 pagesDesign and Analysis of A Fixed-Wing Unmanned Aerial-Aquatic VehicleWinston YangNo ratings yet
- Numerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformDocument10 pagesNumerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformFauzan MahadityaNo ratings yet
- Halbe 2010 (Control)Document42 pagesHalbe 2010 (Control)vicente acostaNo ratings yet
- Comparative Investigation On Hydrodynamic Performance of Pump-Jet Propulsion Designed by Direct and Inverse Design MethodsDocument33 pagesComparative Investigation On Hydrodynamic Performance of Pump-Jet Propulsion Designed by Direct and Inverse Design MethodsYunkai ZhouNo ratings yet
- Ijmet 09 10 147Document11 pagesIjmet 09 10 147Ilmal YaqinNo ratings yet
- Marine Propeller Modeling and Performance Analysis Using CFD ToolsDocument11 pagesMarine Propeller Modeling and Performance Analysis Using CFD ToolsWidyahsri EllaNo ratings yet
- Journal of Marine Science and Application November 2019Document20 pagesJournal of Marine Science and Application November 2019ikusumaNo ratings yet
- Jmse 08 00357 v3Document32 pagesJmse 08 00357 v3Hua Hidari YangNo ratings yet
- Aerodynamic Performance Characterization and Structural Analysis of Slotted Propeller: Part A Effect of PositionDocument17 pagesAerodynamic Performance Characterization and Structural Analysis of Slotted Propeller: Part A Effect of PositionOnur SEZENNo ratings yet
- Design and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch VehicleDocument14 pagesDesign and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch Vehicle使徒No ratings yet
- Flight Performance of A Package Delivery Quad Rotor BiplaneDocument12 pagesFlight Performance of A Package Delivery Quad Rotor BiplaneBreno Brito MirandaNo ratings yet
- V73No3P7 C1551 OSP HouDocument24 pagesV73No3P7 C1551 OSP HouAnh NgoNo ratings yet
- Numerical Simulations of The Hydrodynamic PerformaDocument18 pagesNumerical Simulations of The Hydrodynamic Performaمجتبی فرامرزیNo ratings yet
- A CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVDocument20 pagesA CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVAnh NgoNo ratings yet
- SciTech 2020 Prop Wing PreprintDocument21 pagesSciTech 2020 Prop Wing Preprintsyed shahim HaiderNo ratings yet
- Impact of Hull Propeller Rudder Interaction On Ship Powering AssessmentDocument15 pagesImpact of Hull Propeller Rudder Interaction On Ship Powering AssessmentPedro ParenteNo ratings yet
- PDFDocument10 pagesPDFAshwin PatilNo ratings yet
- Unsteady Numerical Analysis of Drag On Non-Winged Hypersonic Vehicle During Re-EntryDocument12 pagesUnsteady Numerical Analysis of Drag On Non-Winged Hypersonic Vehicle During Re-Entrymostafakhalil.mtcNo ratings yet
- Kamil RRA 1Document13 pagesKamil RRA 1P24 Innovation CenterNo ratings yet
- Zbook Ijret20170606015 FdaaeDocument6 pagesZbook Ijret20170606015 FdaaeŞevki SağlamNo ratings yet
- Dynamic Response Modeling of High-Speed Planing Craft With Enforced AccelerationDocument13 pagesDynamic Response Modeling of High-Speed Planing Craft With Enforced Accelerationaz1az0% (1)
- Document2 PDFDocument16 pagesDocument2 PDFFernando RodríguezNo ratings yet
- Numerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsDocument7 pagesNumerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsEkin Ege AltıntaşNo ratings yet
- File002 PDFDocument1 pageFile002 PDFtoshugoNo ratings yet
- Tandem Analysis Effects On Bluff Bodies AerodynamicsDocument10 pagesTandem Analysis Effects On Bluff Bodies AerodynamicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Bow ThrustersDocument15 pagesBow ThrustersJohn Angelo Tuliao100% (1)
- Senior Design II Final Report - Red Bull Air RacerDocument52 pagesSenior Design II Final Report - Red Bull Air RacerLuke HoranNo ratings yet
- HydropnematicDocument17 pagesHydropnematicSareddy HemareddyNo ratings yet
- 2017 ISI 3D CFD Propeller BladeDocument12 pages2017 ISI 3D CFD Propeller Bladebhavesh.meghwal.mec22No ratings yet
- Design and Analysis of A H-Rotor Darrieus Turbine For Water Pumping OperationDocument7 pagesDesign and Analysis of A H-Rotor Darrieus Turbine For Water Pumping OperationSubhranil BarmanNo ratings yet
- Propeller-Induced Hull Vibration - Analytical MethodsDocument14 pagesPropeller-Induced Hull Vibration - Analytical MethodsBill Erick CastilloNo ratings yet
- Sjet 104 16-34Document20 pagesSjet 104 16-34Rakhi JadhavNo ratings yet
- Numerical Simulation of The Wing Performance On Onera M-6 Wing by Adding Winglet Using Computational Uid DynamicsDocument16 pagesNumerical Simulation of The Wing Performance On Onera M-6 Wing by Adding Winglet Using Computational Uid Dynamicsjustjames2102No ratings yet
- 2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationsDocument10 pages2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationshenkNo ratings yet
- CFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionDocument11 pagesCFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionAshley KwambokaNo ratings yet
- Li 2017Document15 pagesLi 2017l4dy3v1lNo ratings yet
- TA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANDocument11 pagesTA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANhemsladyvsky9164No ratings yet
- ResearchGate Ferrier2017Document17 pagesResearchGate Ferrier2017Ananthapadmanabha BhatNo ratings yet
- Aiaa Abstract PDFDocument9 pagesAiaa Abstract PDFsdecadiNo ratings yet
- Jmse 09 01226 v3Document13 pagesJmse 09 01226 v3Thant SinNo ratings yet
- Current Hypersonic Research in The USA: Dr. Robert BakosDocument26 pagesCurrent Hypersonic Research in The USA: Dr. Robert BakosChema GomezNo ratings yet
- KramerYoung-snhPaper Revised RevFinalDocument15 pagesKramerYoung-snhPaper Revised RevFinalJUNIOR OLIVONo ratings yet
- 02.02a Ch2 HW SolutionsDocument16 pages02.02a Ch2 HW SolutionsJUNIOR OLIVONo ratings yet
- 05.01a Lab 1 Numerical IntegrationDocument2 pages05.01a Lab 1 Numerical IntegrationJUNIOR OLIVONo ratings yet
- EN400 Lab #1 Prelab Numerical Integration: InstructionsDocument10 pagesEN400 Lab #1 Prelab Numerical Integration: InstructionsJUNIOR OLIVONo ratings yet
- HSC Part 5 - July 2019Document36 pagesHSC Part 5 - July 2019JUNIOR OLIVONo ratings yet
- ZF Marine Propulsion Systems Surface Drives Application FormDocument4 pagesZF Marine Propulsion Systems Surface Drives Application FormJUNIOR OLIVONo ratings yet
- Nuclear Biological and Chemical Protection: High Speed, Light Craft and Naval Surface CraftDocument16 pagesNuclear Biological and Chemical Protection: High Speed, Light Craft and Naval Surface CraftJUNIOR OLIVONo ratings yet
- Transparency of Classification and Statutory Information No.3Document3 pagesTransparency of Classification and Statutory Information No.3JUNIOR OLIVONo ratings yet
- No 2A Procedure For Hull Failure Incident Reporting No. 2ADocument4 pagesNo 2A Procedure For Hull Failure Incident Reporting No. 2AJUNIOR OLIVONo ratings yet
- PR 02b pdf2658Document5 pagesPR 02b pdf2658JUNIOR OLIVONo ratings yet
- ZF 5055 NR2HDocument4 pagesZF 5055 NR2HJUNIOR OLIVONo ratings yet
- Pr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DDocument6 pagesPr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DJUNIOR OLIVONo ratings yet
- Evinrude E-Tec G2: Installation Color SHAFT LENGTH - In. (MM) Steering Model No. WEIGHT - LB (KG)Document1 pageEvinrude E-Tec G2: Installation Color SHAFT LENGTH - In. (MM) Steering Model No. WEIGHT - LB (KG)JUNIOR OLIVONo ratings yet
- Marsun Co., LTD.: 413moo 4, Soi Sitthichai, Taiban RD., Amphur Muang, Samutprakarn 10280Document2 pagesMarsun Co., LTD.: 413moo 4, Soi Sitthichai, Taiban RD., Amphur Muang, Samutprakarn 10280JUNIOR OLIVONo ratings yet
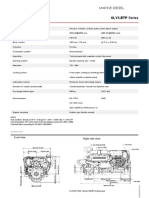
- 6LY3-ETP Series: Marine Diesel EnginesDocument4 pages6LY3-ETP Series: Marine Diesel EnginesJUNIOR OLIVONo ratings yet
- Specifications: Ackhoe OaderDocument4 pagesSpecifications: Ackhoe OaderJUNIOR OLIVO0% (1)
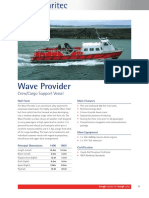
- Wave Provider: Crew/Cargo Support VesselDocument2 pagesWave Provider: Crew/Cargo Support VesselJUNIOR OLIVONo ratings yet
- DIO 01.5a. Pregledi Postojećih Brodova July 2020Document217 pagesDIO 01.5a. Pregledi Postojećih Brodova July 2020Samo SpontanostNo ratings yet
- The Azimuthal PropulsionDocument2 pagesThe Azimuthal PropulsionBORJANo ratings yet
- Phase 2.1Document13 pagesPhase 2.1Neil Allison Najorda CabilbilNo ratings yet
- IIMS News Bulletin October 2023Document37 pagesIIMS News Bulletin October 2023Lionnel ParantNo ratings yet
- Early Aviation History (1909)Document184 pagesEarly Aviation History (1909)CAP History Library100% (8)
- DS-ZF 5355 PDFDocument5 pagesDS-ZF 5355 PDFGabriel Esteban González FrancoNo ratings yet
- Traxxas Tmaxx Pro15Document12 pagesTraxxas Tmaxx Pro15d crosbieNo ratings yet
- FORGINGDocument41 pagesFORGINGPanya PurahongNo ratings yet
- Different Types of Rudder #SafkatDocument11 pagesDifferent Types of Rudder #SafkatSafkat Jubaer ShuvoNo ratings yet
- Sonihull DuoDocument7 pagesSonihull DuoAliasgar PatrawalaNo ratings yet
- Mavic Mini User Manual v1.0 en 1 PDFDocument49 pagesMavic Mini User Manual v1.0 en 1 PDFjaviNo ratings yet
- TWIN DISC MARINE TRANSMISSION Operators - Manual PDFDocument84 pagesTWIN DISC MARINE TRANSMISSION Operators - Manual PDFcascade1100% (2)
- Conceptual Design Studies of Vertical Takeoff and Landing Remotely Piloted Aircraft Systems For Hybrid MissionsDocument14 pagesConceptual Design Studies of Vertical Takeoff and Landing Remotely Piloted Aircraft Systems For Hybrid MissionsS Reza Fattahi MNo ratings yet
- Installation Manual: Multibeam Echo SounderDocument154 pagesInstallation Manual: Multibeam Echo SounderEvgeny YudinNo ratings yet
- Propeller Maintenance Manual 132A: Page 5-5 Rev. 22 Dec/20Document46 pagesPropeller Maintenance Manual 132A: Page 5-5 Rev. 22 Dec/20Alexis KidemaNo ratings yet
- Module-14 Rev-06 PDFDocument168 pagesModule-14 Rev-06 PDFMD. Mahmudul Hasan LimonNo ratings yet
- Propellor Comparison ChartDocument3 pagesPropellor Comparison ChartGuido PoppeNo ratings yet
- U2 Ejercicios00Document13 pagesU2 Ejercicios00francisco trejoNo ratings yet
- National Institute of Technology AgartalaDocument29 pagesNational Institute of Technology AgartalaAbhishek BhattacharjeeNo ratings yet
- Function 4b OralsDocument13 pagesFunction 4b OralsSumeet SawantNo ratings yet
- Chapter1 Mixing PDFDocument26 pagesChapter1 Mixing PDFNicole FelicianoNo ratings yet
- SUBJECT: Increase in Fuel Consumption of Main Engine, MT Aimsmaritime Through The Master, MT AimsmaritimeDocument3 pagesSUBJECT: Increase in Fuel Consumption of Main Engine, MT Aimsmaritime Through The Master, MT AimsmaritimeSwarg VibhaNo ratings yet
- Propulsion of 46000 50000 DWT Handymax TankerDocument20 pagesPropulsion of 46000 50000 DWT Handymax TankerFuchsbauNo ratings yet
- The Ins and Outs Indirect OrvinuDocument8 pagesThe Ins and Outs Indirect OrvinusatishNo ratings yet
- En tp100Document2 pagesEn tp100Arne BergmanNo ratings yet
- Module 1 Exam Practice Exam: Answer:cDocument44 pagesModule 1 Exam Practice Exam: Answer:cJacquie JimenezNo ratings yet
- Azipod XO2100 and XO2300: Product IntroductionDocument28 pagesAzipod XO2100 and XO2300: Product IntroductionReginNo ratings yet
- Untuk Besok TGL 8Document37 pagesUntuk Besok TGL 8Yoga PNo ratings yet