Download as pdf or txt
You might also like
- CG CGK StudyDocument8 pagesCG CGK StudyRahul BenkeNo ratings yet
- Advanced Engineering Informatics: Satoshi Nishiyama, Nao Minakata, Teruyuki Kikuchi, Takao YanoDocument8 pagesAdvanced Engineering Informatics: Satoshi Nishiyama, Nao Minakata, Teruyuki Kikuchi, Takao YanoLUZ XIMENA ESCOBAR BARRIGANo ratings yet
- Industrial Application of Machine VisionDocument6 pagesIndustrial Application of Machine VisionsenthilkumarmamseNo ratings yet
- lidar calibration관련Document7 pageslidar calibration관련yune3139396No ratings yet
- As 117014 TG 601061 WW GB 2021 1Document12 pagesAs 117014 TG 601061 WW GB 2021 1Srivatsava RajagopalanNo ratings yet
- FHM KN Scale Bar 2Document19 pagesFHM KN Scale Bar 2nurnazuraabdrazak97No ratings yet
- Path WebcamDocument8 pagesPath WebcamDeva RajNo ratings yet
- Close Range Photogrammetry For Industrial ApplicationsDocument12 pagesClose Range Photogrammetry For Industrial ApplicationsDoc2005No ratings yet
- Idap 2017 8090292Document5 pagesIdap 2017 8090292redstitch15No ratings yet
- NonContactwhole Part Inspection FinalDocument10 pagesNonContactwhole Part Inspection Finalkranthi142434No ratings yet
- Automated Vision Inspection of Critical Steel Components Based On Signal Analysis Extracted Form ImagesDocument4 pagesAutomated Vision Inspection of Critical Steel Components Based On Signal Analysis Extracted Form ImagesMatteo LanciniNo ratings yet
- Calibration of Photomasks For Optical Coordinate MetrologyDocument12 pagesCalibration of Photomasks For Optical Coordinate MetrologyAlessandroAbateNo ratings yet
- Brain Tumor Pattern Recognition Using Correlation FilterDocument5 pagesBrain Tumor Pattern Recognition Using Correlation FilterInternational Journal of Research in Engineering and TechnologyNo ratings yet
- An Intelligent Cloth Quality Analysis and Reduction of Man Power in Image ProcessingDocument5 pagesAn Intelligent Cloth Quality Analysis and Reduction of Man Power in Image ProcessingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unit V Learning MaterialDocument10 pagesUnit V Learning Materialkk11091079No ratings yet
- Hoang MasalarDocument6 pagesHoang MasalarmydustNo ratings yet
- Toaz - Info Engineering Metrology PRDocument129 pagesToaz - Info Engineering Metrology PRB05Vedant BarpandeNo ratings yet
- 110 Doers TelDocument8 pages110 Doers TelAtha RabbitaNo ratings yet
- Profile Projector 10052016Document24 pagesProfile Projector 10052016S MurthyNo ratings yet
- Advances in Three Dimensional Measurement in Remote Visual InspectionDocument7 pagesAdvances in Three Dimensional Measurement in Remote Visual InspectionTiendatHoangNo ratings yet
- On-Line Inspection and Sorting System For Mechanical Parts Based On Machine VisionDocument6 pagesOn-Line Inspection and Sorting System For Mechanical Parts Based On Machine VisionDaniel SouzaNo ratings yet
- A Simple Method For Dimensional Measurement of Ring-Shaped Objects Using Image Processing TechniqueDocument22 pagesA Simple Method For Dimensional Measurement of Ring-Shaped Objects Using Image Processing TechniqueGogyNo ratings yet
- A Convenient and High-Accuracy Multicamera Calibration Method Based On Imperfect Spherical ObjectsDocument15 pagesA Convenient and High-Accuracy Multicamera Calibration Method Based On Imperfect Spherical ObjectsDr Srini vasanNo ratings yet
- Unit-I Concepts of MeasurementDocument33 pagesUnit-I Concepts of MeasurementShekhar MallurNo ratings yet
- Stereo Camera Calibration For Large Field of View Digital Image Correlation by GaoDocument8 pagesStereo Camera Calibration For Large Field of View Digital Image Correlation by GaoYusril Ihza TachririNo ratings yet
- Profile Projector: Prepared and Presented byDocument25 pagesProfile Projector: Prepared and Presented byMuhammad FaridNo ratings yet
- Overview On Optical Measurements of Shaft Diameter DetectionDocument4 pagesOverview On Optical Measurements of Shaft Diameter DetectionPranav karnNo ratings yet
- Brain Tumor Pattern Recognition Using Correlation FilterDocument5 pagesBrain Tumor Pattern Recognition Using Correlation FilteresatjournalsNo ratings yet
- Automated Defect Inspection System For CMOS Image Sensor With Micro Multi-Layer Non-Spherical Lens ModuleDocument12 pagesAutomated Defect Inspection System For CMOS Image Sensor With Micro Multi-Layer Non-Spherical Lens Module랑블루No ratings yet
- Geometric CalibrationDocument19 pagesGeometric Calibrationb66680028No ratings yet
- Review On Camera CalibrationDocument5 pagesReview On Camera CalibrationJorge LeandroNo ratings yet
- 28-04-2021-1619594381-6 - Ijcse-6. Ijcse - Defect Classification in Surface Structure of Steels Using Deep LearningDocument10 pages28-04-2021-1619594381-6 - Ijcse-6. Ijcse - Defect Classification in Surface Structure of Steels Using Deep Learningiaset123No ratings yet
- Measurement of Building Components Deformations by The Methods of Digital PhotogrammetryDocument9 pagesMeasurement of Building Components Deformations by The Methods of Digital PhotogrammetryKumar PallavNo ratings yet
- 〈1788.3〉 FLOW IMAGING METHOD FOR THE DETERMINATION OF SUBVISIBLE PARTICULATE MATTERDocument6 pages〈1788.3〉 FLOW IMAGING METHOD FOR THE DETERMINATION OF SUBVISIBLE PARTICULATE MATTERMehran ImaniNo ratings yet
- Simple, Accurate, and Robust Projector-Camera CalibrationDocument8 pagesSimple, Accurate, and Robust Projector-Camera CalibrationJosue MelongNo ratings yet
- A26BC887 0912 43F9 A77B 772AF5B41576.Artec Metrology Kit BrochureDocument5 pagesA26BC887 0912 43F9 A77B 772AF5B41576.Artec Metrology Kit Brochureysc22nsfm7No ratings yet
- 2D - DicDocument22 pages2D - Dicitsnothing at the endNo ratings yet
- Size Detection of Firebricks Based On Machine Vision TechnologyDocument4 pagesSize Detection of Firebricks Based On Machine Vision TechnologyMekaTronNo ratings yet
- Bearing Defect Inspection Based On Machine VisionDocument20 pagesBearing Defect Inspection Based On Machine VisionArun Kumar100% (1)
- ControladoresDocument19 pagesControladoresJesus HuamaniNo ratings yet
- In-Process Dimensional Inspection SensorsDocument16 pagesIn-Process Dimensional Inspection SensorsUlviyye ElesgerovaNo ratings yet
- 1 s2.0 S0888327021009675 MainDocument21 pages1 s2.0 S0888327021009675 Mainvincenzo.gattulliNo ratings yet
- WWW - Mechanical.in: Unit-I Concepts of MeasurementDocument33 pagesWWW - Mechanical.in: Unit-I Concepts of Measurementharim_meNo ratings yet
- Lens Distortion Measurement - v30Document24 pagesLens Distortion Measurement - v30haze.eslemNo ratings yet
- Met - 1Document132 pagesMet - 1Ashwani KaninaNo ratings yet
- Application of Computers in TextileDocument4 pagesApplication of Computers in TextileMobin AkhandNo ratings yet
- Engineering Metrology and Measurements Unit 1 2Document82 pagesEngineering Metrology and Measurements Unit 1 2scorpionarnold100% (1)
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocument10 pagesVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNo ratings yet
- Me 3Document5 pagesMe 3Muhammad J SherwaniNo ratings yet
- Introduction To Linear MetrologyDocument71 pagesIntroduction To Linear MetrologyDivakaran MullathNo ratings yet
- Engineering MetrologyDocument34 pagesEngineering MetrologyMatthew CurmiNo ratings yet
- Unit-I Concepts of MeasurementDocument33 pagesUnit-I Concepts of Measurementmuru0105No ratings yet
- Development of An Automatic Optical Measurement System For Automotive Part Surface InspectionDocument6 pagesDevelopment of An Automatic Optical Measurement System For Automotive Part Surface InspectionAnonymous eL4Dsp1BaNo ratings yet
- Oe 29 4 5006Document12 pagesOe 29 4 5006SreedharViswasNo ratings yet
- ProfileDocument25 pagesProfileMuhammad FarhanNo ratings yet
- Inspection of Press Tools and MouldsDocument35 pagesInspection of Press Tools and MouldsPra VeeNo ratings yet
- Engineering Metrology and MeasurementsDocument128 pagesEngineering Metrology and MeasurementsArvind Bhosale100% (7)
- c2Document40 pagesc2Juan Posada GNo ratings yet
- Identification and Rejection of Defective Ceramic Tile Using Image Processing and ARDUINODocument4 pagesIdentification and Rejection of Defective Ceramic Tile Using Image Processing and ARDUINOIJMTST-Online JournalNo ratings yet
- DeforestationDocument1 pageDeforestationzaineb chzkibNo ratings yet
- Apuntes Ingles b2Document25 pagesApuntes Ingles b2Arancha ManeiroNo ratings yet
- Decantador Intermedio IsDocument38 pagesDecantador Intermedio IsAlessacolNo ratings yet
- FijiTimes - Feb 17 2012 Web PDFDocument48 pagesFijiTimes - Feb 17 2012 Web PDFfijitimescanadaNo ratings yet
- REVISING EXERCISES 1baDocument3 pagesREVISING EXERCISES 1baAlvaro LorcaNo ratings yet
- English Upsr: English Paper 2 - Section B 2 (B) - How To Write Your Reasons - SamplesDocument6 pagesEnglish Upsr: English Paper 2 - Section B 2 (B) - How To Write Your Reasons - SamplesAhmad Firdaus IdrisNo ratings yet
- Wa0004.Document15 pagesWa0004.Sudhir RoyNo ratings yet
- Worksheet Research-Title FINALDocument3 pagesWorksheet Research-Title FINALJierroe EvangelistaNo ratings yet
- The Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full ChapterDocument67 pagesThe Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full Chaptersharon.tuttle380100% (6)
- Chapter 6Document18 pagesChapter 6Lydelle Mae CabaltejaNo ratings yet
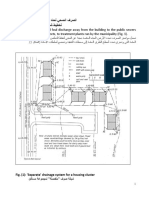
- Drainage Below GroundDocument5 pagesDrainage Below GroundmisharyNo ratings yet
- DX-790-960-65-16.5i-M Model: A79451600v02: Antenna SpecificationsDocument2 pagesDX-790-960-65-16.5i-M Model: A79451600v02: Antenna SpecificationsakiselNo ratings yet
- RailTel Annual Report For Web-CompressedDocument228 pagesRailTel Annual Report For Web-CompressedAmit SahooNo ratings yet
- PR m1Document15 pagesPR m1Jazmyn BulusanNo ratings yet
- Getting Started With Nuvoton NUC140 32-Bit ARM Cortex-M0 Microcontroller PDFDocument7 pagesGetting Started With Nuvoton NUC140 32-Bit ARM Cortex-M0 Microcontroller PDFoktaNo ratings yet
- Cuadernillo de Trabajo: InglésDocument20 pagesCuadernillo de Trabajo: InglésFátima Castellano AlcedoNo ratings yet
- Urushi ArtDocument24 pagesUrushi ArtGuadalupeCaravajalNo ratings yet
- Bcsbi Pictorial BookDocument24 pagesBcsbi Pictorial BookMALAYADRI DUARINo ratings yet
- Bolting Chart For Industrial FlangesDocument6 pagesBolting Chart For Industrial FlangesPritam JadhavNo ratings yet
- SPB ClientDocument4 pagesSPB ClientRKNo ratings yet
- BitBox CarList 2022 10 28Document97 pagesBitBox CarList 2022 10 28marcos hernandezNo ratings yet
- Lienard EquationDocument9 pagesLienard EquationmenguemengueNo ratings yet
- Feasibility StudyyyDocument27 pagesFeasibility StudyyyMichael James ll BanawisNo ratings yet
- g8 With Answer SheetDocument4 pagesg8 With Answer SheetMICHAEL REYESNo ratings yet
- Practice Questions: Musculoskeletal SystemDocument4 pagesPractice Questions: Musculoskeletal SystemSali IqraNo ratings yet
- The Laws On Local Governments SyllabusDocument4 pagesThe Laws On Local Governments SyllabusJohn Kevin ArtuzNo ratings yet
- OrganoLithium ReagentDocument6 pagesOrganoLithium ReagentizaowsikNo ratings yet
- Gcrouch@wsu - Edu Rmancini@wsu - Edu Andreakl@wsu - Edu: Groups/chem.345Document5 pagesGcrouch@wsu - Edu Rmancini@wsu - Edu Andreakl@wsu - Edu: Groups/chem.345Daniel McDermottNo ratings yet
- Sandy Point Brochure 2016Document7 pagesSandy Point Brochure 2016miller999No ratings yet