
Hspice Stimulus Types
Hspice Stimulus Types
You might also like
- Lab 8Document7 pagesLab 8Sulu YntymakovaNo ratings yet
- LAB5Document4 pagesLAB5Juan Camilo Guarnizo BermudezNo ratings yet
- Iso 24356 2022Document11 pagesIso 24356 2022贾宗林No ratings yet
- Irwin, Engineering Circuit Analysis, 11e ISV Chapter 12Document90 pagesIrwin, Engineering Circuit Analysis, 11e ISV Chapter 12이잉No ratings yet
- EP10 Operation of A Cathode Ray Oscilloscope (CRO)Document4 pagesEP10 Operation of A Cathode Ray Oscilloscope (CRO)Kw ChanNo ratings yet
- Lab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)Document6 pagesLab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)MarteNo ratings yet
- Control Systems MAde EasyDocument28 pagesControl Systems MAde EasyJomar BuenaventuraNo ratings yet
- Lab 4: Rectifiers: EE2301: Electronic Devices and Circuits Lab October 16, 2020Document10 pagesLab 4: Rectifiers: EE2301: Electronic Devices and Circuits Lab October 16, 2020Mansi NanavatiNo ratings yet
- Lab # 3 Analysis of Uniform and Non Uniform Quantization of Speech Signals (U-Law and A-Law)Document13 pagesLab # 3 Analysis of Uniform and Non Uniform Quantization of Speech Signals (U-Law and A-Law)zain islamNo ratings yet
- 4 VlsiDocument4 pages4 VlsiNeetish KumarNo ratings yet
- Biomedical Instrumentation File: Submitted By: Preeti GuptaDocument11 pagesBiomedical Instrumentation File: Submitted By: Preeti GuptaPreeti GuptaNo ratings yet
- Design and Development of Single Phase PWM ConverterDocument9 pagesDesign and Development of Single Phase PWM ConverterPulkit SinghNo ratings yet
- 7 Segment Display in LabviewDocument11 pages7 Segment Display in LabviewSatya SwethaNo ratings yet
- Basic Guide To Virtual Electronics in SpiceDocument14 pagesBasic Guide To Virtual Electronics in SpiceKiranNo ratings yet
- VHDL StatementsDocument30 pagesVHDL StatementsEr Deepak GargNo ratings yet
- Lab 4 Write UpDocument6 pagesLab 4 Write UpChuy ResendizNo ratings yet
- Performance Characteristics of Sensors and Actuators - P2Document25 pagesPerformance Characteristics of Sensors and Actuators - P2mxolisi.dhlamini95No ratings yet
- Arduino - Auto Range Analog InputDocument7 pagesArduino - Auto Range Analog InputbarbosiNo ratings yet
- Introduction To Oscilloscope and Function Generator Lab 1Document6 pagesIntroduction To Oscilloscope and Function Generator Lab 1Suleman MalikNo ratings yet
- Question 3Document10 pagesQuestion 3Correos WebNo ratings yet
- DSP Record EndDocument91 pagesDSP Record Endpapa pepaamNo ratings yet
- Code DumpDocument17 pagesCode DumpGameplay OrIgInAlINo ratings yet
- Signal Generator Project StatementDocument16 pagesSignal Generator Project StatementHussain Bin AliNo ratings yet
- Computation of Scattering Using The Finite Difference Time Domain (FDTD) MethodDocument7 pagesComputation of Scattering Using The Finite Difference Time Domain (FDTD) MethodAndyNo ratings yet
- 6LABO Ganago Student Lab7Document27 pages6LABO Ganago Student Lab7Rocio Deidamia Puppi HerreraNo ratings yet
- Yeditepe University Department of Electrical and Electronics Engineering Ee 232 Introduction To ElectronicsDocument5 pagesYeditepe University Department of Electrical and Electronics Engineering Ee 232 Introduction To Electronicstarafe5509No ratings yet
- UNIT 3-Cluster - 4Document67 pagesUNIT 3-Cluster - 4Anvesh MagantiNo ratings yet
- Experiment 3Document6 pagesExperiment 3piyushvarsh0No ratings yet
- Assignment 1 - Btech 10040 21Document14 pagesAssignment 1 - Btech 10040 21gvjbhknlkmNo ratings yet
- DSP Experiment 1Document23 pagesDSP Experiment 1Dharshan kumarNo ratings yet
- Lab 4Document15 pagesLab 4Edwin JijoNo ratings yet
- EE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainDocument50 pagesEE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainWala SaadehNo ratings yet
- Documentatie PT A Scrie Aplicatii Analize MatlabDocument19 pagesDocumentatie PT A Scrie Aplicatii Analize MatlabAlin ArgeseanuNo ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- Module2 Python 17CS664Document18 pagesModule2 Python 17CS664thejasrajNo ratings yet
- cs2403 16marksDocument120 pagescs2403 16marksAnna PhilipsNo ratings yet
- EL220 Signals and Systems: Experiment # 03Document7 pagesEL220 Signals and Systems: Experiment # 03Choudhary Abdul AqeelNo ratings yet
- Question 4Document17 pagesQuestion 4Correos WebNo ratings yet
- Exp 5 Oscilloscope X-Y Mode, Function Generator and Lissajous Polar (2012)Document13 pagesExp 5 Oscilloscope X-Y Mode, Function Generator and Lissajous Polar (2012)usmpowerlabNo ratings yet
- Experiment 6 Sinusoidal Steady State: ObjectiveDocument5 pagesExperiment 6 Sinusoidal Steady State: Objectiveahmed shahNo ratings yet
- Cathode Ray Oscilloscope ExperimentDocument10 pagesCathode Ray Oscilloscope ExperimentHenok BelaynehNo ratings yet
- DSP LM15 - 0611Document144 pagesDSP LM15 - 0611arunkumar subbarajNo ratings yet
- Lab 5Document11 pagesLab 5Kishore KumarNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- UNIT 3 Cluster 4Document67 pagesUNIT 3 Cluster 4SandyNo ratings yet
- Experiment No. 2 AIM:: A) To Measure Phase Difference Between Two WaveformsDocument6 pagesExperiment No. 2 AIM:: A) To Measure Phase Difference Between Two Waveformsnishugoel0102No ratings yet
- Module - 2: 2.1 IterationDocument19 pagesModule - 2: 2.1 IterationEC010No ratings yet
- RET670 Transformer Testing GuideDocument7 pagesRET670 Transformer Testing Guidefrodo frodoNo ratings yet
- LRC CircuitsDocument10 pagesLRC CircuitsleisllyNo ratings yet
- Lock-In BasicsDocument6 pagesLock-In BasicsAnkitMishraNo ratings yet
- GNU Plot AssignmentDocument4 pagesGNU Plot AssignmentDivyanshuVermaNo ratings yet
- Nomi Eca2 Lab 1Document10 pagesNomi Eca2 Lab 1mubarizmughalNo ratings yet
- Static CalibrationDocument9 pagesStatic Calibrationcoper123No ratings yet
- Fourier TransformDocument3 pagesFourier TransformIndra SetyaNo ratings yet
- Student Lab Manual For Signals - ConvolutionDocument13 pagesStudent Lab Manual For Signals - ConvolutionAndrew KohNo ratings yet
- To Convert The Analog Signal Into Digital PulsesDocument12 pagesTo Convert The Analog Signal Into Digital PulsesJuNo ratings yet
- Question 2Document7 pagesQuestion 2Correos WebNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- How To Calibrateda Oscilloscope - HTMLDocument8 pagesHow To Calibrateda Oscilloscope - HTMLWahyu DinNo ratings yet
- Delta Ia-Mds Vfd-Ed Um en 20201006Document389 pagesDelta Ia-Mds Vfd-Ed Um en 20201006Oscar ThrasherNo ratings yet
- Milliohm Meter Mk2 Parts ListDocument1 pageMilliohm Meter Mk2 Parts Listgg blaNo ratings yet
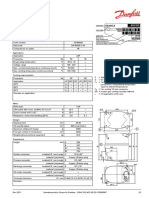
- Gs26Clx LBP Compressor R404A/R507 220-240V 50Hz: GeneralDocument2 pagesGs26Clx LBP Compressor R404A/R507 220-240V 50Hz: GeneralmustafaNo ratings yet
- 2f5b5radar Numerical IIDocument2 pages2f5b5radar Numerical IIGiri PrasadNo ratings yet
- Iskra Alternators AAK CDocument2 pagesIskra Alternators AAK CosobaxNo ratings yet
- Iot Based Landslide DetectorDocument4 pagesIot Based Landslide Detectorsaurabhmagar333No ratings yet
- Watch Wireless Calling Receiver User ManualDocument12 pagesWatch Wireless Calling Receiver User ManualCata GodoyNo ratings yet
- Apcjab Fmi C10adhoc A en 220301Document27 pagesApcjab Fmi C10adhoc A en 220301M. AZIZINo ratings yet
- FA 500 - Dew Point Sensor From - 80 To 20 °ctdDocument2 pagesFA 500 - Dew Point Sensor From - 80 To 20 °ctdKaisar JamilNo ratings yet
- CA11E User S ManualDocument2 pagesCA11E User S ManualJr Da SilvaNo ratings yet
- Diagrama de Lineas RadioDocument1 pageDiagrama de Lineas RadioPedro Rodríguez FernándezNo ratings yet
- Celan GT SL enDocument7 pagesCelan GT SL enwosahe3570No ratings yet
- Power System Analysis and Design, SI EditionDocument5 pagesPower System Analysis and Design, SI EditionAkimeNo ratings yet
- 5 Hybird Inverters + Batteries Price List 08-04-240411 - 084955Document7 pages5 Hybird Inverters + Batteries Price List 08-04-240411 - 084955lucasalentuNo ratings yet
- M-Audio Profire 2626 - Multiple Profire ConfigurationDocument6 pagesM-Audio Profire 2626 - Multiple Profire ConfigurationCirrusStratusNo ratings yet
- Digital Logics and Microprocessor Lab Assessment 4: Registration No.: 19BIT0267 Name: Ankit Kumar Slot: L47 + L48Document9 pagesDigital Logics and Microprocessor Lab Assessment 4: Registration No.: 19BIT0267 Name: Ankit Kumar Slot: L47 + L48ANKITNo ratings yet
- Pf-Emco#218-63p Rev.bDocument6 pagesPf-Emco#218-63p Rev.bPhung Cam VanNo ratings yet
- Cyntec Co., LTD.: Power Choke Coil PCMB053T TypeDocument3 pagesCyntec Co., LTD.: Power Choke Coil PCMB053T TypeRDNo ratings yet
- Low Cost, 4 Range Timer 642SQ: SpecificationsDocument1 pageLow Cost, 4 Range Timer 642SQ: SpecificationsAhmad AbdelrazekNo ratings yet
- Jlpea 08 00023 PDFDocument20 pagesJlpea 08 00023 PDFKarim BNo ratings yet
- Sa 518#9Document204 pagesSa 518#9Manikandan SelvarajNo ratings yet
- L38: Viterbi Decoder 저전력 설계: Sungkyunkwan Univ. Vada LabDocument33 pages L38: Viterbi Decoder 저전력 설계: Sungkyunkwan Univ. Vada LabVP SengarNo ratings yet
- IDAX 300/350: Insulation Diagnostic AnalyzersDocument6 pagesIDAX 300/350: Insulation Diagnostic AnalyzersizwanNo ratings yet
- Crossvent-3+: Operation & Service ManualDocument102 pagesCrossvent-3+: Operation & Service ManualIngenieria NemoconNo ratings yet
- Curie Temp KanthalDocument3 pagesCurie Temp KanthalMoamen MohamedNo ratings yet
- Isplsi and Plsi 1032E: High-Density Programmable LogicDocument17 pagesIsplsi and Plsi 1032E: High-Density Programmable LogicLAUTHUSNo ratings yet
- Technical Manual: SE-B1, B2, B3, B4Document18 pagesTechnical Manual: SE-B1, B2, B3, B4Renan SonciniNo ratings yet
- Clarity Matrix G3 MX55X: LCD Video Wall SystemDocument2 pagesClarity Matrix G3 MX55X: LCD Video Wall SystemanganNo ratings yet
























































































Download as pdf or txt
You might also like
- Lab 8Document7 pagesLab 8Sulu YntymakovaNo ratings yet
- LAB5Document4 pagesLAB5Juan Camilo Guarnizo BermudezNo ratings yet
- Iso 24356 2022Document11 pagesIso 24356 2022贾宗林No ratings yet
- Irwin, Engineering Circuit Analysis, 11e ISV Chapter 12Document90 pagesIrwin, Engineering Circuit Analysis, 11e ISV Chapter 12이잉No ratings yet
- EP10 Operation of A Cathode Ray Oscilloscope (CRO)Document4 pagesEP10 Operation of A Cathode Ray Oscilloscope (CRO)Kw ChanNo ratings yet
- Lab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)Document6 pagesLab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)MarteNo ratings yet
- Control Systems MAde EasyDocument28 pagesControl Systems MAde EasyJomar BuenaventuraNo ratings yet
- Lab 4: Rectifiers: EE2301: Electronic Devices and Circuits Lab October 16, 2020Document10 pagesLab 4: Rectifiers: EE2301: Electronic Devices and Circuits Lab October 16, 2020Mansi NanavatiNo ratings yet
- Lab # 3 Analysis of Uniform and Non Uniform Quantization of Speech Signals (U-Law and A-Law)Document13 pagesLab # 3 Analysis of Uniform and Non Uniform Quantization of Speech Signals (U-Law and A-Law)zain islamNo ratings yet
- 4 VlsiDocument4 pages4 VlsiNeetish KumarNo ratings yet
- Biomedical Instrumentation File: Submitted By: Preeti GuptaDocument11 pagesBiomedical Instrumentation File: Submitted By: Preeti GuptaPreeti GuptaNo ratings yet
- Design and Development of Single Phase PWM ConverterDocument9 pagesDesign and Development of Single Phase PWM ConverterPulkit SinghNo ratings yet
- 7 Segment Display in LabviewDocument11 pages7 Segment Display in LabviewSatya SwethaNo ratings yet
- Basic Guide To Virtual Electronics in SpiceDocument14 pagesBasic Guide To Virtual Electronics in SpiceKiranNo ratings yet
- VHDL StatementsDocument30 pagesVHDL StatementsEr Deepak GargNo ratings yet
- Lab 4 Write UpDocument6 pagesLab 4 Write UpChuy ResendizNo ratings yet
- Performance Characteristics of Sensors and Actuators - P2Document25 pagesPerformance Characteristics of Sensors and Actuators - P2mxolisi.dhlamini95No ratings yet
- Arduino - Auto Range Analog InputDocument7 pagesArduino - Auto Range Analog InputbarbosiNo ratings yet
- Introduction To Oscilloscope and Function Generator Lab 1Document6 pagesIntroduction To Oscilloscope and Function Generator Lab 1Suleman MalikNo ratings yet
- Question 3Document10 pagesQuestion 3Correos WebNo ratings yet
- DSP Record EndDocument91 pagesDSP Record Endpapa pepaamNo ratings yet
- Code DumpDocument17 pagesCode DumpGameplay OrIgInAlINo ratings yet
- Signal Generator Project StatementDocument16 pagesSignal Generator Project StatementHussain Bin AliNo ratings yet
- Computation of Scattering Using The Finite Difference Time Domain (FDTD) MethodDocument7 pagesComputation of Scattering Using The Finite Difference Time Domain (FDTD) MethodAndyNo ratings yet
- 6LABO Ganago Student Lab7Document27 pages6LABO Ganago Student Lab7Rocio Deidamia Puppi HerreraNo ratings yet
- Yeditepe University Department of Electrical and Electronics Engineering Ee 232 Introduction To ElectronicsDocument5 pagesYeditepe University Department of Electrical and Electronics Engineering Ee 232 Introduction To Electronicstarafe5509No ratings yet
- UNIT 3-Cluster - 4Document67 pagesUNIT 3-Cluster - 4Anvesh MagantiNo ratings yet
- Experiment 3Document6 pagesExperiment 3piyushvarsh0No ratings yet
- Assignment 1 - Btech 10040 21Document14 pagesAssignment 1 - Btech 10040 21gvjbhknlkmNo ratings yet
- DSP Experiment 1Document23 pagesDSP Experiment 1Dharshan kumarNo ratings yet
- Lab 4Document15 pagesLab 4Edwin JijoNo ratings yet
- EE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainDocument50 pagesEE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainWala SaadehNo ratings yet
- Documentatie PT A Scrie Aplicatii Analize MatlabDocument19 pagesDocumentatie PT A Scrie Aplicatii Analize MatlabAlin ArgeseanuNo ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- Module2 Python 17CS664Document18 pagesModule2 Python 17CS664thejasrajNo ratings yet
- cs2403 16marksDocument120 pagescs2403 16marksAnna PhilipsNo ratings yet
- EL220 Signals and Systems: Experiment # 03Document7 pagesEL220 Signals and Systems: Experiment # 03Choudhary Abdul AqeelNo ratings yet
- Question 4Document17 pagesQuestion 4Correos WebNo ratings yet
- Exp 5 Oscilloscope X-Y Mode, Function Generator and Lissajous Polar (2012)Document13 pagesExp 5 Oscilloscope X-Y Mode, Function Generator and Lissajous Polar (2012)usmpowerlabNo ratings yet
- Experiment 6 Sinusoidal Steady State: ObjectiveDocument5 pagesExperiment 6 Sinusoidal Steady State: Objectiveahmed shahNo ratings yet
- Cathode Ray Oscilloscope ExperimentDocument10 pagesCathode Ray Oscilloscope ExperimentHenok BelaynehNo ratings yet
- DSP LM15 - 0611Document144 pagesDSP LM15 - 0611arunkumar subbarajNo ratings yet
- Lab 5Document11 pagesLab 5Kishore KumarNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- UNIT 3 Cluster 4Document67 pagesUNIT 3 Cluster 4SandyNo ratings yet
- Experiment No. 2 AIM:: A) To Measure Phase Difference Between Two WaveformsDocument6 pagesExperiment No. 2 AIM:: A) To Measure Phase Difference Between Two Waveformsnishugoel0102No ratings yet
- Module - 2: 2.1 IterationDocument19 pagesModule - 2: 2.1 IterationEC010No ratings yet
- RET670 Transformer Testing GuideDocument7 pagesRET670 Transformer Testing Guidefrodo frodoNo ratings yet
- LRC CircuitsDocument10 pagesLRC CircuitsleisllyNo ratings yet
- Lock-In BasicsDocument6 pagesLock-In BasicsAnkitMishraNo ratings yet
- GNU Plot AssignmentDocument4 pagesGNU Plot AssignmentDivyanshuVermaNo ratings yet
- Nomi Eca2 Lab 1Document10 pagesNomi Eca2 Lab 1mubarizmughalNo ratings yet
- Static CalibrationDocument9 pagesStatic Calibrationcoper123No ratings yet
- Fourier TransformDocument3 pagesFourier TransformIndra SetyaNo ratings yet
- Student Lab Manual For Signals - ConvolutionDocument13 pagesStudent Lab Manual For Signals - ConvolutionAndrew KohNo ratings yet
- To Convert The Analog Signal Into Digital PulsesDocument12 pagesTo Convert The Analog Signal Into Digital PulsesJuNo ratings yet
- Question 2Document7 pagesQuestion 2Correos WebNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- How To Calibrateda Oscilloscope - HTMLDocument8 pagesHow To Calibrateda Oscilloscope - HTMLWahyu DinNo ratings yet
- Delta Ia-Mds Vfd-Ed Um en 20201006Document389 pagesDelta Ia-Mds Vfd-Ed Um en 20201006Oscar ThrasherNo ratings yet
- Milliohm Meter Mk2 Parts ListDocument1 pageMilliohm Meter Mk2 Parts Listgg blaNo ratings yet
- Gs26Clx LBP Compressor R404A/R507 220-240V 50Hz: GeneralDocument2 pagesGs26Clx LBP Compressor R404A/R507 220-240V 50Hz: GeneralmustafaNo ratings yet
- 2f5b5radar Numerical IIDocument2 pages2f5b5radar Numerical IIGiri PrasadNo ratings yet
- Iskra Alternators AAK CDocument2 pagesIskra Alternators AAK CosobaxNo ratings yet
- Iot Based Landslide DetectorDocument4 pagesIot Based Landslide Detectorsaurabhmagar333No ratings yet
- Watch Wireless Calling Receiver User ManualDocument12 pagesWatch Wireless Calling Receiver User ManualCata GodoyNo ratings yet
- Apcjab Fmi C10adhoc A en 220301Document27 pagesApcjab Fmi C10adhoc A en 220301M. AZIZINo ratings yet
- FA 500 - Dew Point Sensor From - 80 To 20 °ctdDocument2 pagesFA 500 - Dew Point Sensor From - 80 To 20 °ctdKaisar JamilNo ratings yet
- CA11E User S ManualDocument2 pagesCA11E User S ManualJr Da SilvaNo ratings yet
- Diagrama de Lineas RadioDocument1 pageDiagrama de Lineas RadioPedro Rodríguez FernándezNo ratings yet
- Celan GT SL enDocument7 pagesCelan GT SL enwosahe3570No ratings yet
- Power System Analysis and Design, SI EditionDocument5 pagesPower System Analysis and Design, SI EditionAkimeNo ratings yet
- 5 Hybird Inverters + Batteries Price List 08-04-240411 - 084955Document7 pages5 Hybird Inverters + Batteries Price List 08-04-240411 - 084955lucasalentuNo ratings yet
- M-Audio Profire 2626 - Multiple Profire ConfigurationDocument6 pagesM-Audio Profire 2626 - Multiple Profire ConfigurationCirrusStratusNo ratings yet
- Digital Logics and Microprocessor Lab Assessment 4: Registration No.: 19BIT0267 Name: Ankit Kumar Slot: L47 + L48Document9 pagesDigital Logics and Microprocessor Lab Assessment 4: Registration No.: 19BIT0267 Name: Ankit Kumar Slot: L47 + L48ANKITNo ratings yet
- Pf-Emco#218-63p Rev.bDocument6 pagesPf-Emco#218-63p Rev.bPhung Cam VanNo ratings yet
- Cyntec Co., LTD.: Power Choke Coil PCMB053T TypeDocument3 pagesCyntec Co., LTD.: Power Choke Coil PCMB053T TypeRDNo ratings yet
- Low Cost, 4 Range Timer 642SQ: SpecificationsDocument1 pageLow Cost, 4 Range Timer 642SQ: SpecificationsAhmad AbdelrazekNo ratings yet
- Jlpea 08 00023 PDFDocument20 pagesJlpea 08 00023 PDFKarim BNo ratings yet
- Sa 518#9Document204 pagesSa 518#9Manikandan SelvarajNo ratings yet
- L38: Viterbi Decoder 저전력 설계: Sungkyunkwan Univ. Vada LabDocument33 pages L38: Viterbi Decoder 저전력 설계: Sungkyunkwan Univ. Vada LabVP SengarNo ratings yet
- IDAX 300/350: Insulation Diagnostic AnalyzersDocument6 pagesIDAX 300/350: Insulation Diagnostic AnalyzersizwanNo ratings yet
- Crossvent-3+: Operation & Service ManualDocument102 pagesCrossvent-3+: Operation & Service ManualIngenieria NemoconNo ratings yet
- Curie Temp KanthalDocument3 pagesCurie Temp KanthalMoamen MohamedNo ratings yet
- Isplsi and Plsi 1032E: High-Density Programmable LogicDocument17 pagesIsplsi and Plsi 1032E: High-Density Programmable LogicLAUTHUSNo ratings yet
- Technical Manual: SE-B1, B2, B3, B4Document18 pagesTechnical Manual: SE-B1, B2, B3, B4Renan SonciniNo ratings yet
- Clarity Matrix G3 MX55X: LCD Video Wall SystemDocument2 pagesClarity Matrix G3 MX55X: LCD Video Wall SystemanganNo ratings yet