Download as pdf or txt
You might also like
- Fuse Box Diagram Volkswagen Passat (B8 2015-2019)Document2 pagesFuse Box Diagram Volkswagen Passat (B8 2015-2019)slhkrh1905No ratings yet
- Calculus Strauss PDFDocument1,114 pagesCalculus Strauss PDFR.V. Raghavan76% (38)
- Events API DocumentationDocument5 pagesEvents API Documentationmario librerosNo ratings yet
- Johnston (1999) Why We Feel. The Science of Human EmotionsDocument221 pagesJohnston (1999) Why We Feel. The Science of Human EmotionsNavi Setnom ArieugonNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityDocument22 pagesCS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityHarrisNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 04: Convexity and ContinuityDocument16 pagesCS 726: Nonlinear Optimization 1 Lecture 04: Convexity and ContinuityHarrisNo ratings yet
- Sat Comp0142Document4 pagesSat Comp0142Musa AsadNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 05: Existence: Michael C. FerrisDocument11 pagesCS 726: Nonlinear Optimization 1 Lecture 05: Existence: Michael C. FerrisHarrisNo ratings yet
- EN007001 Engineering Research Methodology: Statistical Inference: Bayesian InferenceDocument72 pagesEN007001 Engineering Research Methodology: Statistical Inference: Bayesian Inferenceคงเดช คํานึกNo ratings yet
- Final Review Part2Document3 pagesFinal Review Part2Bad ManNo ratings yet
- FunctionsDocument14 pagesFunctionsAkash KumarNo ratings yet
- 2008 Multiple Choice WITH ANSWERSDocument29 pages2008 Multiple Choice WITH ANSWERSAradheea GawadeNo ratings yet
- 2018 MidcalculusDocument8 pages2018 Midcalculusalliyaahmad3No ratings yet
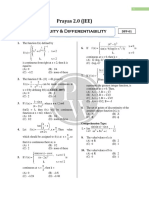
- Prayas 2.0 (JEE) : Continuity & DifferentiabilityDocument2 pagesPrayas 2.0 (JEE) : Continuity & DifferentiabilityVISHNU PRIYA BUDDANINo ratings yet
- PDFDocument66 pagesPDFgajaNo ratings yet
- Assignment Booklet: School of Sciences Indira Gandhi National Open University Maidan Garhi New Delhi-110068Document5 pagesAssignment Booklet: School of Sciences Indira Gandhi National Open University Maidan Garhi New Delhi-110068Achuthan MukundarajanNo ratings yet
- 07of15 - Theoretical PerspectivesDocument20 pages07of15 - Theoretical PerspectivesBranko NikolicNo ratings yet
- Chapter 3Document48 pagesChapter 3Nguyễn Hoàng TùngNo ratings yet
- 8 - Data FittingDocument27 pages8 - Data FittingDuy MaiNo ratings yet
- Topology Short NoticesDocument12 pagesTopology Short Noticesfaisal chathaNo ratings yet
- Nonlinear Observer Design For Smooth SystemsDocument13 pagesNonlinear Observer Design For Smooth Systemsoussama sadkiNo ratings yet
- Continuous Random Variables and Probability Distributions: Institute of Technology of CambodiaDocument34 pagesContinuous Random Variables and Probability Distributions: Institute of Technology of CambodiaLeng BuntithNo ratings yet
- Biweekly Test - 2 (Advanced) : DATE: 26/05/2018 TIME: 180 Min. AE: MathematicsDocument6 pagesBiweekly Test - 2 (Advanced) : DATE: 26/05/2018 TIME: 180 Min. AE: MathematicsaumoghNo ratings yet
- Assignment Booklet: School of Sciences Indira Gandhi National Open University New DelhiDocument5 pagesAssignment Booklet: School of Sciences Indira Gandhi National Open University New DelhiSiba Prasad HotaNo ratings yet
- Assignment 3Document4 pagesAssignment 3samsNo ratings yet
- CPSC 542F WINTER 2017: Lecture NotesDocument10 pagesCPSC 542F WINTER 2017: Lecture NotesArif HermawanNo ratings yet
- M2504 Lec 01Document19 pagesM2504 Lec 01Mokoepa LipholoNo ratings yet
- Lecture 3Document27 pagesLecture 3ALBANO JOAQUIMNo ratings yet
- DPP 3 Function StudentDocument5 pagesDPP 3 Function Studenttomarayush570No ratings yet
- Chapter 3: Partial Derivative: Lecturer: Nguyen Minh Quan, PHD Quannm@Hcmiu - Edu.VnDocument101 pagesChapter 3: Partial Derivative: Lecturer: Nguyen Minh Quan, PHD Quannm@Hcmiu - Edu.VnKhánh AnNo ratings yet
- 2016 MidDocument6 pages2016 MidAazmeer RahmanNo ratings yet
- Isi Msqe 2008Document13 pagesIsi Msqe 2008chinmayaNo ratings yet
- Inverse Function TheoremNewDocument10 pagesInverse Function TheoremNewAbrid AgharasNo ratings yet
- Lease Squares MethodDocument10 pagesLease Squares Methodsuraj poudelNo ratings yet
- Week 2Document11 pagesWeek 2JaZz SFNo ratings yet
- Homework Assignment #1Document6 pagesHomework Assignment #1QuangAnh VuNo ratings yet
- Apr-2023-Ece-Board-Exam-Preboard HIGHLIGHTDocument8 pagesApr-2023-Ece-Board-Exam-Preboard HIGHLIGHTJanmarc CorpuzNo ratings yet
- Metric Space NotesDocument70 pagesMetric Space NotesNehal AnuragNo ratings yet
- Series 1: April 2020Document5 pagesSeries 1: April 2020Bob CrossNo ratings yet
- Midterm Key Version ADocument8 pagesMidterm Key Version AAli Zain ParharNo ratings yet
- Chapter3and4extra YousefDocument8 pagesChapter3and4extra YousefyusufshabanNo ratings yet
- Mathematical Association of AmericaDocument17 pagesMathematical Association of AmericaElham AnarakiNo ratings yet
- MathDocument14 pagesMathhungkgNo ratings yet
- Definite IntegralsDocument6 pagesDefinite IntegralsMatthew JordanNo ratings yet
- GRADE 12 Mathematics NAT Review MaterialsDocument12 pagesGRADE 12 Mathematics NAT Review MaterialsIrene MacapalaNo ratings yet
- D-4 (Diff. Calculus) QDocument2 pagesD-4 (Diff. Calculus) QRiya SharmaNo ratings yet
- MTS423 - Functional AnalysisDocument20 pagesMTS423 - Functional AnalysisEmmanuel AyomikunNo ratings yet
- Week 6 Worksheet: F (X) F (X) X 3Document4 pagesWeek 6 Worksheet: F (X) F (X) X 3Sean Eddward CunananNo ratings yet
- SRG AOD QuestionsDocument14 pagesSRG AOD QuestionsHarshul DuaNo ratings yet
- A Comparison of Methods For The Estimation of Weibull Distribution ParametersDocument14 pagesA Comparison of Methods For The Estimation of Weibull Distribution ParametersNeng Iyani MaulidaNo ratings yet
- MIT18 05S14 Class5slides PDFDocument17 pagesMIT18 05S14 Class5slides PDFAftab SaadNo ratings yet
- Calculusstrausspdf PDF FreeDocument1,114 pagesCalculusstrausspdf PDF Freevansh tomarNo ratings yet
- Math Physics: Fourier Integrals: Part IiDocument8 pagesMath Physics: Fourier Integrals: Part IiEpic WinNo ratings yet
- Chapter 2Document8 pagesChapter 2murad.ridwanNo ratings yet
- A10289W1 CP4 June2022Document5 pagesA10289W1 CP4 June2022ryanlin10No ratings yet
- L - Unit 1Document3 pagesL - Unit 1Raymond ShirimaNo ratings yet
- The Completion of Generalized B-Metric Spaces and Fixed PointsDocument19 pagesThe Completion of Generalized B-Metric Spaces and Fixed PointsSafoora ElienNo ratings yet
- Anal 2Document5 pagesAnal 2florezjulian74No ratings yet
- Fractional Taylor Expansions For Some Classes of FunctionsDocument2 pagesFractional Taylor Expansions For Some Classes of FunctionsDimiter ProdanovNo ratings yet
- X P X e X X D X e X X D X e X X D V X e X: Q P P QDocument5 pagesX P X e X X D X e X X D X e X X D V X e X: Q P P QErmiasNo ratings yet
- Calc 3 Lecture Notes Section 12.4 1 of 7Document7 pagesCalc 3 Lecture Notes Section 12.4 1 of 7Nicholas MutuaNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityDocument22 pagesCS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityHarrisNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 05: Existence: Michael C. FerrisDocument11 pagesCS 726: Nonlinear Optimization 1 Lecture 05: Existence: Michael C. FerrisHarrisNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 04: Convexity and ContinuityDocument16 pagesCS 726: Nonlinear Optimization 1 Lecture 04: Convexity and ContinuityHarrisNo ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 04A: Matrix BackgroundDocument24 pagesCS 726: Nonlinear Optimization 1 Lecture 04A: Matrix BackgroundHarrisNo ratings yet
- Lecture 01Document16 pagesLecture 01HarrisNo ratings yet
- Some, No, Any, EveryDocument2 pagesSome, No, Any, Everyvivadavid100% (1)
- Diesel Engine Crankshaft DisassemblyDocument15 pagesDiesel Engine Crankshaft DisassemblyAnshar NaraNo ratings yet
- Unit 5 - Futher PractiseDocument34 pagesUnit 5 - Futher PractiseNgọc Hoa LêNo ratings yet
- Mobily Tbpo Civil SpecsDocument96 pagesMobily Tbpo Civil Specsmarwan.mohamed.mostafa2008No ratings yet
- Module 1 An Overview of ArtDocument4 pagesModule 1 An Overview of ArtAngeline AdezaNo ratings yet
- Sfdunj Jkon PH 1F 3DM Mep 000014Document1 pageSfdunj Jkon PH 1F 3DM Mep 000014Syauqy AlfarakaniNo ratings yet
- Cunningworths' Checklist (1995) : Number Items YES NO A. Aims and Approaches 1 2 3 4 B. Design and Organization 5 6 7 8Document3 pagesCunningworths' Checklist (1995) : Number Items YES NO A. Aims and Approaches 1 2 3 4 B. Design and Organization 5 6 7 8Thảo NhiNo ratings yet
- Full Download PDF of Test Bank For Exploring Marriages and Families, 3rd Edition, Karen Seccombe All ChapterDocument26 pagesFull Download PDF of Test Bank For Exploring Marriages and Families, 3rd Edition, Karen Seccombe All Chapterroosennwosu100% (4)
- PVC Foam Furniture Sheet PDFDocument2 pagesPVC Foam Furniture Sheet PDFAbdul Majid100% (1)
- Checklist Information Security Policy ImplementationDocument18 pagesChecklist Information Security Policy Implementationbaye omar SoceNo ratings yet
- Ruskin Bonds "THE KITE MAKER"Document14 pagesRuskin Bonds "THE KITE MAKER"Dhruti Galgali38% (8)
- The Terror of Pediatric Medicine DR SircusDocument258 pagesThe Terror of Pediatric Medicine DR SircusAngel Francisco100% (1)
- A30 CismDocument14 pagesA30 CismRohan SharmaNo ratings yet
- Unit 4 HadoopDocument86 pagesUnit 4 HadoopShivanshuSinghNo ratings yet
- Organisational Analysis of Hero Motocorp and Eicher Motors: Group 9Document7 pagesOrganisational Analysis of Hero Motocorp and Eicher Motors: Group 9Rupanshi JaiswalNo ratings yet
- Critical Analysis of Story Number 2Document12 pagesCritical Analysis of Story Number 2David MorganNo ratings yet
- FAKRO Technical Specification DRF DU6 PDFDocument2 pagesFAKRO Technical Specification DRF DU6 PDFthomasNo ratings yet
- DichotomousKeyNYFish PDFDocument13 pagesDichotomousKeyNYFish PDFNermine AbedNo ratings yet
- Lamellar TearingDocument6 pagesLamellar TearingAndreaNo ratings yet
- E4 16 1-FlangeDocument7 pagesE4 16 1-Flangesajadbe3792No ratings yet
- Chapter 1 of Why Machines Will Never RulDocument53 pagesChapter 1 of Why Machines Will Never Rulprof William S. DantasNo ratings yet
- Cabbash Vms BrochureDocument22 pagesCabbash Vms BrochureOghosa OsahenrhumwenNo ratings yet
- Job Opportunities Sydney 7082017Document10 pagesJob Opportunities Sydney 7082017Dianita CorreaNo ratings yet
- Solutions For The Extra Problems in Module 4Document3 pagesSolutions For The Extra Problems in Module 4Dev HalvawalaNo ratings yet
- The Separation and Synthesis of Lipidic 1,2-And 1,3-Diols From Natural Phenolic Lipids For The Complexation and Recovery of BoronDocument23 pagesThe Separation and Synthesis of Lipidic 1,2-And 1,3-Diols From Natural Phenolic Lipids For The Complexation and Recovery of BoronNanasaheb PatilNo ratings yet
- Taylor's Scientific ManagementDocument7 pagesTaylor's Scientific Managementsipanjegiven0% (1)
- Vijaya DairyDocument65 pagesVijaya DairyAjay KumarNo ratings yet