
Alokasi
Alokasi
You might also like
- TM 11398Document592 pagesTM 11398krill.copco50% (2)
- What Is RAID Control PDFDocument6 pagesWhat Is RAID Control PDFAhmedNo ratings yet
- Concurrency: Deadlock and StarvationDocument21 pagesConcurrency: Deadlock and StarvationAlainNo ratings yet
- Operating - System DeadlockDocument23 pagesOperating - System Deadlocksasongko wardhanaNo ratings yet
- DeadlocksDocument29 pagesDeadlocksNarmatha ThiyagarajanNo ratings yet
- Lecture24 25 26Document28 pagesLecture24 25 26b96er34955No ratings yet
- System Programming - II DeadlocksDocument55 pagesSystem Programming - II DeadlocksKumail RazaNo ratings yet
- Chapter 03 OSDocument35 pagesChapter 03 OSDo Cao Dat (K15 HL)No ratings yet
- DeadlockDocument50 pagesDeadlockali bajwaNo ratings yet
- Unit 3 Chapter2 Deadlock NotesDocument29 pagesUnit 3 Chapter2 Deadlock NotesArvind Reddy4.0No ratings yet
- Unit IVDocument53 pagesUnit IVKHARDEKAR SUJALNo ratings yet
- Concurrency: Deadlock and Starvation: William StallingsDocument87 pagesConcurrency: Deadlock and Starvation: William StallingsSree MakenaNo ratings yet
- CH 5Document30 pagesCH 5jobNo ratings yet
- Concurrency: Deadlock and StarvationDocument51 pagesConcurrency: Deadlock and Starvationapi-26103409No ratings yet
- Chapter 06Document26 pagesChapter 06Fauzan PrasetyoNo ratings yet
- Principles of Operating Systems: Lecture 11 - Deadlocks Ardalan Amiri SaniDocument45 pagesPrinciples of Operating Systems: Lecture 11 - Deadlocks Ardalan Amiri SanigabboudehNo ratings yet
- Unit-3 OS DeadlockDocument45 pagesUnit-3 OS DeadlockFaizan AhmadNo ratings yet
- Operting System BookDocument32 pagesOperting System Bookbasit qamar100% (2)
- DeadlockDocument41 pagesDeadlockapi-26557430No ratings yet
- DeadlocksDocument29 pagesDeadlocksAtif RehmanNo ratings yet
- Unit 3Document67 pagesUnit 3Apeksha puppalwarNo ratings yet
- Lecture 4 DeadlocksDocument26 pagesLecture 4 DeadlocksHarris ChikunyaNo ratings yet
- Operating SystemsDocument46 pagesOperating SystemsBùi MinhNo ratings yet
- 5 DeadlockDocument48 pages5 Deadlock22bce068No ratings yet
- Concurrency: Mutual Exclusion, Synchronization, Deadlock and StarvationDocument57 pagesConcurrency: Mutual Exclusion, Synchronization, Deadlock and StarvationBasharat HussainNo ratings yet
- OS Chapter 6 (Deadlock) (13!4!2020) 1Document24 pagesOS Chapter 6 (Deadlock) (13!4!2020) 1nabish khanNo ratings yet
- Set4 DeadlockDocument16 pagesSet4 DeadlockmeeraNo ratings yet
- Chapter 4 Process Management DeadlockDocument22 pagesChapter 4 Process Management DeadlockArmoniem BezabihNo ratings yet
- DeadlocksDocument38 pagesDeadlocksM Hussnain ShabbirNo ratings yet
- Chapter 3Document48 pagesChapter 3mehari kirosNo ratings yet
- DeadlockDocument71 pagesDeadlockGlrmnNo ratings yet
- OS Part 06Document45 pagesOS Part 06Nguyen Hai An (K15 HL)No ratings yet
- 3.1 DeadlocksDocument11 pages3.1 DeadlocksPAVITHRA M RNo ratings yet
- OS Part 06Document47 pagesOS Part 06dieuNo ratings yet
- DeadlockDocument29 pagesDeadlockVeer SinghNo ratings yet
- Chapter 3 - Old PPT - DeadlockDocument40 pagesChapter 3 - Old PPT - DeadlockYashika.Asrani Btech2020No ratings yet
- Concurrency: Deadlock and StarvationDocument18 pagesConcurrency: Deadlock and Starvationnaqash33No ratings yet
- OS Lecture-8 (Deadlock)Document55 pagesOS Lecture-8 (Deadlock)pkapurbe22No ratings yet
- Chapter 03 OSDocument35 pagesChapter 03 OSQuý Ngo XuanNo ratings yet
- Chapter 3Document57 pagesChapter 3Elikana BarikiNo ratings yet
- OS-Chap6-2021 01 22Document38 pagesOS-Chap6-2021 01 22hieuhn.22dsNo ratings yet
- Chapter06 - Concurrency Deadlock and StarvationDocument54 pagesChapter06 - Concurrency Deadlock and StarvationJoko SusantoNo ratings yet
- Chapter06 - Concurrency Deadlock and StarvationDocument52 pagesChapter06 - Concurrency Deadlock and StarvationKhofifah NurlaelaNo ratings yet
- OS Chapter 3 DeadlockDocument38 pagesOS Chapter 3 Deadlockhabtamuasefa563No ratings yet
- Unit 6.deadlockDocument46 pagesUnit 6.deadlocknicotinelife0No ratings yet
- GM-3 2BCS303Document48 pagesGM-3 2BCS303geetha megharajNo ratings yet
- Lecture 19Document26 pagesLecture 19Vikas ChoudharyNo ratings yet
- OS Lec 15-DeadlocksDocument32 pagesOS Lec 15-Deadlocksvibivo3532No ratings yet
- Chapter 5-DeadlockDocument30 pagesChapter 5-DeadlockRediet BadieNo ratings yet
- Yongchuan Liu School of Computer ScienceDocument42 pagesYongchuan Liu School of Computer Sciencemd kamruzzamanNo ratings yet
- Module 23Document22 pagesModule 23NikhilNo ratings yet
- Operating System-DeadlockDocument65 pagesOperating System-DeadlockShivam BhaskarNo ratings yet
- DeadlockDocument44 pagesDeadlocksimbarashepmapfumoNo ratings yet
- Deadlock Mar 21Document37 pagesDeadlock Mar 21skha5997No ratings yet
- Deadlocks: Reading: Silberschatz Additional Reading: StallingsDocument42 pagesDeadlocks: Reading: Silberschatz Additional Reading: StallingsdureNo ratings yet
- Ln8-Deadlock 2pp PDFDocument15 pagesLn8-Deadlock 2pp PDFSivaVigneshNo ratings yet
- Chapter8 Deadlocks PDFDocument22 pagesChapter8 Deadlocks PDFjavediqbal45820No ratings yet
- OS Unit - 3 NotesDocument43 pagesOS Unit - 3 NoteshahahaNo ratings yet
- Operating System B. Tech. Delhi Technological University Deadlocks Instructor: Divyashikha SethiaDocument26 pagesOperating System B. Tech. Delhi Technological University Deadlocks Instructor: Divyashikha Sethiasx46bNo ratings yet
- DeadlockDocument67 pagesDeadlockshamza hanifNo ratings yet
- Ag4q-212s KBDocument2 pagesAg4q-212s KBhtek.thunderainNo ratings yet
- Brochure Keor S GBDocument8 pagesBrochure Keor S GBFernando CespedesNo ratings yet
- Fetomaternal Hemorrhage (FMH), An Update Review of LiteratureDocument35 pagesFetomaternal Hemorrhage (FMH), An Update Review of LiteratureEugenia Jeniffer JNo ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- EuropeDocument5 pagesEuropeAmicus CuriaeNo ratings yet
- Production of Biodegradable Plastics AsDocument6 pagesProduction of Biodegradable Plastics AsEbenezer EffisahNo ratings yet
- Chapter8-Campuran Pada Tingkat Molekuler - Part 1Document58 pagesChapter8-Campuran Pada Tingkat Molekuler - Part 1Uswatun KhasanahNo ratings yet
- 1 Kawasaki FSDocument16 pages1 Kawasaki FSmatgoffNo ratings yet
- Costing By-Product and Joint ProductsDocument36 pagesCosting By-Product and Joint ProductseltantiNo ratings yet
- CSC 2701 - CalculusDocument5 pagesCSC 2701 - CalculusMd Rubaiyat BhuiyanNo ratings yet
- (HMI-LP-RT30 + R131-A - User Manual) A06 - ENDocument110 pages(HMI-LP-RT30 + R131-A - User Manual) A06 - ENrehanNo ratings yet
- Regulator InfoDocument6 pagesRegulator InfoAguilar AlexNo ratings yet
- Background of Philippine Art and Literature in Romantic RealismDocument2 pagesBackground of Philippine Art and Literature in Romantic RealismRaldz CoyocaNo ratings yet
- 1 s2.0 S0264127522004105 MainDocument11 pages1 s2.0 S0264127522004105 MainAsimov RiyazNo ratings yet
- ToR For Fiberglass Biogas Plants Installation - EOI PDFDocument4 pagesToR For Fiberglass Biogas Plants Installation - EOI PDFmy09No ratings yet
- SR-36-01-01 HAZOP TOR Rehman Production FacilityDocument30 pagesSR-36-01-01 HAZOP TOR Rehman Production FacilityMuhammad.Saim100% (1)
- Visual Storytelling The Digital Video Documentary - Original PDFDocument44 pagesVisual Storytelling The Digital Video Documentary - Original PDFjparanoti100% (1)
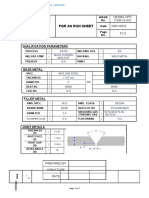
- PQR As Run SheetDocument2 pagesPQR As Run SheetAhmed ElsharkawNo ratings yet
- Ex 4Document4 pagesEx 420-MCE-63 SYED HASSAN KUMAILNo ratings yet
- Solution Manual For Fundamentals of Semiconductor Fabrication Gary S May Simon M Sze Isbn 0471232793 Isbn 978-0-471 23279 7 Isbn 9780471232797Document16 pagesSolution Manual For Fundamentals of Semiconductor Fabrication Gary S May Simon M Sze Isbn 0471232793 Isbn 978-0-471 23279 7 Isbn 9780471232797warepneumomxkhf100% (17)
- EVM TechmaxDocument96 pagesEVM Techmaxnikhileshdhuri97No ratings yet
- 10 1016@j Compag 2020 105668Document9 pages10 1016@j Compag 2020 105668manohar badriNo ratings yet
- Ebffiledoc - 204download PDF Logic and Algebraic Structures in Quantum Computing 1St Edition Jennifer Chubb Ebook Full ChapterDocument53 pagesEbffiledoc - 204download PDF Logic and Algebraic Structures in Quantum Computing 1St Edition Jennifer Chubb Ebook Full Chapterkevin.carter759100% (3)
- Veins and Hydrothermal DepositsDocument2 pagesVeins and Hydrothermal Depositsalimurtadha100% (1)
- Intensifying AdjectivesDocument2 pagesIntensifying AdjectivesReena JimmyNo ratings yet
- KDIGO CKD MBD Quick Reference Guide June 2022Document11 pagesKDIGO CKD MBD Quick Reference Guide June 2022Esy LNo ratings yet
- Petroleum Engineering Lab 1 (PGE313) Experiment 2 Determination of PorosityDocument13 pagesPetroleum Engineering Lab 1 (PGE313) Experiment 2 Determination of PorosityAli AbubakarNo ratings yet
- هاشم عدي حاتم سيارات ثاني التجربة الثانيهDocument6 pagesهاشم عدي حاتم سيارات ثاني التجربة الثانيههاشم عديNo ratings yet
























































































Download as pdf or txt
You might also like
- TM 11398Document592 pagesTM 11398krill.copco50% (2)
- What Is RAID Control PDFDocument6 pagesWhat Is RAID Control PDFAhmedNo ratings yet
- Concurrency: Deadlock and StarvationDocument21 pagesConcurrency: Deadlock and StarvationAlainNo ratings yet
- Operating - System DeadlockDocument23 pagesOperating - System Deadlocksasongko wardhanaNo ratings yet
- DeadlocksDocument29 pagesDeadlocksNarmatha ThiyagarajanNo ratings yet
- Lecture24 25 26Document28 pagesLecture24 25 26b96er34955No ratings yet
- System Programming - II DeadlocksDocument55 pagesSystem Programming - II DeadlocksKumail RazaNo ratings yet
- Chapter 03 OSDocument35 pagesChapter 03 OSDo Cao Dat (K15 HL)No ratings yet
- DeadlockDocument50 pagesDeadlockali bajwaNo ratings yet
- Unit 3 Chapter2 Deadlock NotesDocument29 pagesUnit 3 Chapter2 Deadlock NotesArvind Reddy4.0No ratings yet
- Unit IVDocument53 pagesUnit IVKHARDEKAR SUJALNo ratings yet
- Concurrency: Deadlock and Starvation: William StallingsDocument87 pagesConcurrency: Deadlock and Starvation: William StallingsSree MakenaNo ratings yet
- CH 5Document30 pagesCH 5jobNo ratings yet
- Concurrency: Deadlock and StarvationDocument51 pagesConcurrency: Deadlock and Starvationapi-26103409No ratings yet
- Chapter 06Document26 pagesChapter 06Fauzan PrasetyoNo ratings yet
- Principles of Operating Systems: Lecture 11 - Deadlocks Ardalan Amiri SaniDocument45 pagesPrinciples of Operating Systems: Lecture 11 - Deadlocks Ardalan Amiri SanigabboudehNo ratings yet
- Unit-3 OS DeadlockDocument45 pagesUnit-3 OS DeadlockFaizan AhmadNo ratings yet
- Operting System BookDocument32 pagesOperting System Bookbasit qamar100% (2)
- DeadlockDocument41 pagesDeadlockapi-26557430No ratings yet
- DeadlocksDocument29 pagesDeadlocksAtif RehmanNo ratings yet
- Unit 3Document67 pagesUnit 3Apeksha puppalwarNo ratings yet
- Lecture 4 DeadlocksDocument26 pagesLecture 4 DeadlocksHarris ChikunyaNo ratings yet
- Operating SystemsDocument46 pagesOperating SystemsBùi MinhNo ratings yet
- 5 DeadlockDocument48 pages5 Deadlock22bce068No ratings yet
- Concurrency: Mutual Exclusion, Synchronization, Deadlock and StarvationDocument57 pagesConcurrency: Mutual Exclusion, Synchronization, Deadlock and StarvationBasharat HussainNo ratings yet
- OS Chapter 6 (Deadlock) (13!4!2020) 1Document24 pagesOS Chapter 6 (Deadlock) (13!4!2020) 1nabish khanNo ratings yet
- Set4 DeadlockDocument16 pagesSet4 DeadlockmeeraNo ratings yet
- Chapter 4 Process Management DeadlockDocument22 pagesChapter 4 Process Management DeadlockArmoniem BezabihNo ratings yet
- DeadlocksDocument38 pagesDeadlocksM Hussnain ShabbirNo ratings yet
- Chapter 3Document48 pagesChapter 3mehari kirosNo ratings yet
- DeadlockDocument71 pagesDeadlockGlrmnNo ratings yet
- OS Part 06Document45 pagesOS Part 06Nguyen Hai An (K15 HL)No ratings yet
- 3.1 DeadlocksDocument11 pages3.1 DeadlocksPAVITHRA M RNo ratings yet
- OS Part 06Document47 pagesOS Part 06dieuNo ratings yet
- DeadlockDocument29 pagesDeadlockVeer SinghNo ratings yet
- Chapter 3 - Old PPT - DeadlockDocument40 pagesChapter 3 - Old PPT - DeadlockYashika.Asrani Btech2020No ratings yet
- Concurrency: Deadlock and StarvationDocument18 pagesConcurrency: Deadlock and Starvationnaqash33No ratings yet
- OS Lecture-8 (Deadlock)Document55 pagesOS Lecture-8 (Deadlock)pkapurbe22No ratings yet
- Chapter 03 OSDocument35 pagesChapter 03 OSQuý Ngo XuanNo ratings yet
- Chapter 3Document57 pagesChapter 3Elikana BarikiNo ratings yet
- OS-Chap6-2021 01 22Document38 pagesOS-Chap6-2021 01 22hieuhn.22dsNo ratings yet
- Chapter06 - Concurrency Deadlock and StarvationDocument54 pagesChapter06 - Concurrency Deadlock and StarvationJoko SusantoNo ratings yet
- Chapter06 - Concurrency Deadlock and StarvationDocument52 pagesChapter06 - Concurrency Deadlock and StarvationKhofifah NurlaelaNo ratings yet
- OS Chapter 3 DeadlockDocument38 pagesOS Chapter 3 Deadlockhabtamuasefa563No ratings yet
- Unit 6.deadlockDocument46 pagesUnit 6.deadlocknicotinelife0No ratings yet
- GM-3 2BCS303Document48 pagesGM-3 2BCS303geetha megharajNo ratings yet
- Lecture 19Document26 pagesLecture 19Vikas ChoudharyNo ratings yet
- OS Lec 15-DeadlocksDocument32 pagesOS Lec 15-Deadlocksvibivo3532No ratings yet
- Chapter 5-DeadlockDocument30 pagesChapter 5-DeadlockRediet BadieNo ratings yet
- Yongchuan Liu School of Computer ScienceDocument42 pagesYongchuan Liu School of Computer Sciencemd kamruzzamanNo ratings yet
- Module 23Document22 pagesModule 23NikhilNo ratings yet
- Operating System-DeadlockDocument65 pagesOperating System-DeadlockShivam BhaskarNo ratings yet
- DeadlockDocument44 pagesDeadlocksimbarashepmapfumoNo ratings yet
- Deadlock Mar 21Document37 pagesDeadlock Mar 21skha5997No ratings yet
- Deadlocks: Reading: Silberschatz Additional Reading: StallingsDocument42 pagesDeadlocks: Reading: Silberschatz Additional Reading: StallingsdureNo ratings yet
- Ln8-Deadlock 2pp PDFDocument15 pagesLn8-Deadlock 2pp PDFSivaVigneshNo ratings yet
- Chapter8 Deadlocks PDFDocument22 pagesChapter8 Deadlocks PDFjavediqbal45820No ratings yet
- OS Unit - 3 NotesDocument43 pagesOS Unit - 3 NoteshahahaNo ratings yet
- Operating System B. Tech. Delhi Technological University Deadlocks Instructor: Divyashikha SethiaDocument26 pagesOperating System B. Tech. Delhi Technological University Deadlocks Instructor: Divyashikha Sethiasx46bNo ratings yet
- DeadlockDocument67 pagesDeadlockshamza hanifNo ratings yet
- Ag4q-212s KBDocument2 pagesAg4q-212s KBhtek.thunderainNo ratings yet
- Brochure Keor S GBDocument8 pagesBrochure Keor S GBFernando CespedesNo ratings yet
- Fetomaternal Hemorrhage (FMH), An Update Review of LiteratureDocument35 pagesFetomaternal Hemorrhage (FMH), An Update Review of LiteratureEugenia Jeniffer JNo ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- EuropeDocument5 pagesEuropeAmicus CuriaeNo ratings yet
- Production of Biodegradable Plastics AsDocument6 pagesProduction of Biodegradable Plastics AsEbenezer EffisahNo ratings yet
- Chapter8-Campuran Pada Tingkat Molekuler - Part 1Document58 pagesChapter8-Campuran Pada Tingkat Molekuler - Part 1Uswatun KhasanahNo ratings yet
- 1 Kawasaki FSDocument16 pages1 Kawasaki FSmatgoffNo ratings yet
- Costing By-Product and Joint ProductsDocument36 pagesCosting By-Product and Joint ProductseltantiNo ratings yet
- CSC 2701 - CalculusDocument5 pagesCSC 2701 - CalculusMd Rubaiyat BhuiyanNo ratings yet
- (HMI-LP-RT30 + R131-A - User Manual) A06 - ENDocument110 pages(HMI-LP-RT30 + R131-A - User Manual) A06 - ENrehanNo ratings yet
- Regulator InfoDocument6 pagesRegulator InfoAguilar AlexNo ratings yet
- Background of Philippine Art and Literature in Romantic RealismDocument2 pagesBackground of Philippine Art and Literature in Romantic RealismRaldz CoyocaNo ratings yet
- 1 s2.0 S0264127522004105 MainDocument11 pages1 s2.0 S0264127522004105 MainAsimov RiyazNo ratings yet
- ToR For Fiberglass Biogas Plants Installation - EOI PDFDocument4 pagesToR For Fiberglass Biogas Plants Installation - EOI PDFmy09No ratings yet
- SR-36-01-01 HAZOP TOR Rehman Production FacilityDocument30 pagesSR-36-01-01 HAZOP TOR Rehman Production FacilityMuhammad.Saim100% (1)
- Visual Storytelling The Digital Video Documentary - Original PDFDocument44 pagesVisual Storytelling The Digital Video Documentary - Original PDFjparanoti100% (1)
- PQR As Run SheetDocument2 pagesPQR As Run SheetAhmed ElsharkawNo ratings yet
- Ex 4Document4 pagesEx 420-MCE-63 SYED HASSAN KUMAILNo ratings yet
- Solution Manual For Fundamentals of Semiconductor Fabrication Gary S May Simon M Sze Isbn 0471232793 Isbn 978-0-471 23279 7 Isbn 9780471232797Document16 pagesSolution Manual For Fundamentals of Semiconductor Fabrication Gary S May Simon M Sze Isbn 0471232793 Isbn 978-0-471 23279 7 Isbn 9780471232797warepneumomxkhf100% (17)
- EVM TechmaxDocument96 pagesEVM Techmaxnikhileshdhuri97No ratings yet
- 10 1016@j Compag 2020 105668Document9 pages10 1016@j Compag 2020 105668manohar badriNo ratings yet
- Ebffiledoc - 204download PDF Logic and Algebraic Structures in Quantum Computing 1St Edition Jennifer Chubb Ebook Full ChapterDocument53 pagesEbffiledoc - 204download PDF Logic and Algebraic Structures in Quantum Computing 1St Edition Jennifer Chubb Ebook Full Chapterkevin.carter759100% (3)
- Veins and Hydrothermal DepositsDocument2 pagesVeins and Hydrothermal Depositsalimurtadha100% (1)
- Intensifying AdjectivesDocument2 pagesIntensifying AdjectivesReena JimmyNo ratings yet
- KDIGO CKD MBD Quick Reference Guide June 2022Document11 pagesKDIGO CKD MBD Quick Reference Guide June 2022Esy LNo ratings yet
- Petroleum Engineering Lab 1 (PGE313) Experiment 2 Determination of PorosityDocument13 pagesPetroleum Engineering Lab 1 (PGE313) Experiment 2 Determination of PorosityAli AbubakarNo ratings yet
- هاشم عدي حاتم سيارات ثاني التجربة الثانيهDocument6 pagesهاشم عدي حاتم سيارات ثاني التجربة الثانيههاشم عديNo ratings yet