Download as pdf or txt
You might also like
- Mat223 UTM Midterm UofTDocument7 pagesMat223 UTM Midterm UofTRevownSada100% (1)
- Ah 100Document3 pagesAh 100Zoeloe_2100% (1)
- Exercise 2Document7 pagesExercise 2noormqNo ratings yet
- Test I: InstructionsDocument6 pagesTest I: InstructionsJustino LorenzoNo ratings yet
- Test I: 'Xnh8QlyhuvlwDocument6 pagesTest I: 'Xnh8QlyhuvlwJustino LorenzoNo ratings yet
- Test I: 'Xnh8QlyhuvlwDocument6 pagesTest I: 'Xnh8QlyhuvlwJustino LorenzoNo ratings yet
- Jdcortor - Actividad 2 Redes en Serie y Paralelo de Resistores, Resistencia EquivalenteDocument4 pagesJdcortor - Actividad 2 Redes en Serie y Paralelo de Resistores, Resistencia EquivalentePaolaBernalSRNo ratings yet
- The Parameter Table For A Number of Filter Responses Is Given in The Appendix at The End of This Question PaperDocument6 pagesThe Parameter Table For A Number of Filter Responses Is Given in The Appendix at The End of This Question PaperAlex ZXNo ratings yet
- ECX4230 - Assignment # 3 - 2010 Due Date: See Activity DiaryDocument4 pagesECX4230 - Assignment # 3 - 2010 Due Date: See Activity DiaryDilanNo ratings yet
- ECE 3144 Lecture 8: Dr. Rose Q. Hu Electrical and Computer Engineering Department Mississippi State UniversityDocument10 pagesECE 3144 Lecture 8: Dr. Rose Q. Hu Electrical and Computer Engineering Department Mississippi State UniversityGopakumar G NairNo ratings yet
- 15 DC Circuits Tutorial SolutionsDocument7 pages15 DC Circuits Tutorial SolutionsZhao Le TongNo ratings yet
- Lecture 06Document6 pagesLecture 06Putu Ayu SaraswatiNo ratings yet
- 212 - Problem Set 5Document1 page212 - Problem Set 5everyoneMDNo ratings yet
- Circuits 1 Delta To WyeDocument11 pagesCircuits 1 Delta To WyeSherwin PagpaguitanNo ratings yet
- EEE 5 Homework 01: InstructionsDocument1 pageEEE 5 Homework 01: InstructionsJoseph Vladimir EstilloreNo ratings yet
- Implementar en Laboratorio Controlador Pid: 2 6 3 2 6 A B C DDocument2 pagesImplementar en Laboratorio Controlador Pid: 2 6 3 2 6 A B C Dharlyn159No ratings yet
- Name: Nr. Mat. Signature:: A B A BDocument6 pagesName: Nr. Mat. Signature:: A B A BThanujaNo ratings yet
- Electric Circuits 1st Edition by Kang ISBN Test BankDocument20 pagesElectric Circuits 1st Edition by Kang ISBN Test Bankhazel100% (26)
- Test Bank For Electric Circuits 1St Edition by Kang Isbn 1305635213 9781305635210 Full Chapter PDFDocument30 pagesTest Bank For Electric Circuits 1St Edition by Kang Isbn 1305635213 9781305635210 Full Chapter PDFlouise.pushard527100% (25)
- Test I: 'Xnh8QlyhuvlwDocument6 pagesTest I: 'Xnh8QlyhuvlwJustino LorenzoNo ratings yet
- Islamic University of Technology (Iut) : Course: Name of The ExperimentDocument2 pagesIslamic University of Technology (Iut) : Course: Name of The ExperimentshiamNo ratings yet
- Star &delta ConnectionDocument4 pagesStar &delta ConnectionRali sp college DumkaNo ratings yet
- Dwnload Full Electric Circuits 1st Edition Kang Test Bank PDFDocument35 pagesDwnload Full Electric Circuits 1st Edition Kang Test Bank PDFpeterrodriguezcwbqomdksi100% (16)
- D Y ConversionDocument1 pageD Y Conversionmstan11No ratings yet
- R1 6Ω R4 4Ω R5 6Ω V1 10 VDocument63 pagesR1 6Ω R4 4Ω R5 6Ω V1 10 Vď èNo ratings yet
- Third Week (Class Work and Home Work)Document3 pagesThird Week (Class Work and Home Work)Mai AlafandyNo ratings yet
- Exercise 4Document4 pagesExercise 4kchaurasia868No ratings yet
- Exercise 4Document4 pagesExercise 4kchaurasia868No ratings yet
- Arduino 8x48 Led Matrix With 74HC595 ROW Common CathodeDocument1 pageArduino 8x48 Led Matrix With 74HC595 ROW Common CathodevinNo ratings yet
- R1.4 2.5 D435 TG 04 2021 EMEA Rev00 EN v1 PDFDocument16 pagesR1.4 2.5 D435 TG 04 2021 EMEA Rev00 EN v1 PDFGilo MonterrubioNo ratings yet
- 4.6 Y-Delta ConversionDocument3 pages4.6 Y-Delta ConversioncutiesfunnypetNo ratings yet
- امثلة ماتلاب PDFDocument64 pagesامثلة ماتلاب PDFď è100% (1)
- Solu HWset 9Document16 pagesSolu HWset 9AmalinaNo ratings yet
- Circuit With Series-Parallel Resistor CombinationsDocument6 pagesCircuit With Series-Parallel Resistor CombinationsMuhammad HasnainNo ratings yet
- Current Electricity Exercise 4 SolDocument4 pagesCurrent Electricity Exercise 4 SolAyush AroraNo ratings yet
- RC Phase Shift OscillatorDocument25 pagesRC Phase Shift Oscillatorahmed omarNo ratings yet
- R R R R R R V R I: Instructions: Fill in Each Blank With The Appropriate Answer. If Explanation Is RequiredDocument5 pagesR R R R R R V R I: Instructions: Fill in Each Blank With The Appropriate Answer. If Explanation Is RequiredEarl Cris RiggsNo ratings yet
- حسابات التأريضDocument4 pagesحسابات التأريضHemo A AlsharifNo ratings yet
- Reading 5bDocument37 pagesReading 5bshafyvonommyNo ratings yet
- +24V DC - 24V DC: 5 Orange 6 Light Blue NC NC NO NODocument1 page+24V DC - 24V DC: 5 Orange 6 Light Blue NC NC NO NOMOHAMED SAYED NASEM TeachingNo ratings yet
- Electric Circuits 1st Edition Kang Test BankDocument35 pagesElectric Circuits 1st Edition Kang Test Banknicoledickersonwmncpoyefk100% (27)
- Multiplexado PDFDocument1 pageMultiplexado PDFANGEL SAMANAMUDNo ratings yet
- Circuito de Control para Motor DCDocument3 pagesCircuito de Control para Motor DCEdgar AvircataNo ratings yet
- Prob3 19sDocument3 pagesProb3 19scucabeludoNo ratings yet
- Linear Power Amplifier Using HEXFETDocument9 pagesLinear Power Amplifier Using HEXFETRicardoCavalheiroNo ratings yet
- Pre Info 1 ReqDocument4 pagesPre Info 1 ReqBoris AmaroNo ratings yet
- Homework 4: Programming Languages and Compilers (Cos 305) S - Aa - Bac - DC - Bda A - ADocument5 pagesHomework 4: Programming Languages and Compilers (Cos 305) S - Aa - Bac - DC - Bda A - AAbdullahNo ratings yet
- Sankalp Phase-V Ce 6 Practice-1Document4 pagesSankalp Phase-V Ce 6 Practice-1PranavNo ratings yet
- Small Signal Model AC AC IHDocument1 pageSmall Signal Model AC AC IHruanNo ratings yet
- Delta-Wye and Wye-Delta TransformationDocument3 pagesDelta-Wye and Wye-Delta TransformationDozdi40% (5)
- Engineering 3821 Circuit Analysis Laboratory Manual (Fall 2006)Document20 pagesEngineering 3821 Circuit Analysis Laboratory Manual (Fall 2006)Adnan KarimNo ratings yet
- ESC201 Assignment 1Document3 pagesESC201 Assignment 1garud2221No ratings yet
- 4bar MechanismDocument3 pages4bar MechanismStar GlacierNo ratings yet
- Ansys ShapeoptDocument10 pagesAnsys Shapeoptapi-3833671No ratings yet
- Dynamic Resistance Measurement For Onload Tap ChangesDocument50 pagesDynamic Resistance Measurement For Onload Tap ChangesAhmed GhaniNo ratings yet
- Tap Changers Positions and Its Resistance CapabilitesDocument50 pagesTap Changers Positions and Its Resistance CapabilitesAhmed GhaniNo ratings yet
- 03 Oscillator With Op AmpDocument19 pages03 Oscillator With Op Ampjacklai900906No ratings yet
- Worked Annotated Sample Problems CreateDocument8 pagesWorked Annotated Sample Problems CreateJohnrenald SuelloNo ratings yet
- Mechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manual DownloadDocument84 pagesMechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manual DownloadAlice Jones100% (25)
- Stereo Widening: Huub Smits (The Netherlands)Document2 pagesStereo Widening: Huub Smits (The Netherlands)HecOsNo ratings yet
- HW 6Document3 pagesHW 6qurriyatus zahroNo ratings yet
- Dynamics PPT 1Document13 pagesDynamics PPT 1qurriyatus zahroNo ratings yet
- HW 4Document2 pagesHW 4qurriyatus zahroNo ratings yet
- AME 352 Online, HW-3 3-1 Design An Equal Time Forward and Back Four-Bar Mechanism To Operate The Windshield Wiper of The RearDocument2 pagesAME 352 Online, HW-3 3-1 Design An Equal Time Forward and Back Four-Bar Mechanism To Operate The Windshield Wiper of The Rearqurriyatus zahroNo ratings yet
- HW 11Document2 pagesHW 11qurriyatus zahroNo ratings yet
- AME 352 Online, HW-10: A, Determine The Resistive Force That IsDocument2 pagesAME 352 Online, HW-10: A, Determine The Resistive Force That Isqurriyatus zahroNo ratings yet
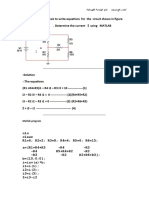
- AME 352 Online, HW-9 9-1 For The Slider-Crank Mechanism Shown Consider The Following Data (Your Choice of Unit)Document3 pagesAME 352 Online, HW-9 9-1 For The Slider-Crank Mechanism Shown Consider The Following Data (Your Choice of Unit)qurriyatus zahroNo ratings yet
- Torsion Field, A Review1Document6 pagesTorsion Field, A Review1MariusEduardNo ratings yet
- Matrices II, Transformations II and VectorsDocument25 pagesMatrices II, Transformations II and VectorsAnthony BensonNo ratings yet
- Fermi EnergyDocument6 pagesFermi EnergyReddyvari Venugopal100% (1)
- Three Revolutionary Principles: Classical MechanicsDocument17 pagesThree Revolutionary Principles: Classical MechanicsjNo ratings yet
- F GMM/R: 6735 Unit Test Phy5Document5 pagesF GMM/R: 6735 Unit Test Phy5Dr-Salah JaradatNo ratings yet
- Applications Hamilton PrincipleDocument12 pagesApplications Hamilton PrincipleSeparatorNo ratings yet
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Interfacial Transport Phenomena 2"" EditionDocument14 pagesInterfacial Transport Phenomena 2"" EditionMahdi koolivandNo ratings yet
- Lec 4 Equation of PlaneDocument6 pagesLec 4 Equation of PlaneMahad ElahiNo ratings yet
- Quantum Field Theory in Curved Spacetime: Peng ZhaoDocument30 pagesQuantum Field Theory in Curved Spacetime: Peng Zhaohimanshudhol25No ratings yet
- Chem530 Syllabus F15Document3 pagesChem530 Syllabus F15sd2No ratings yet
- Analysis of Additional Mathematics SPM PapersDocument2 pagesAnalysis of Additional Mathematics SPM PapersJeremy LingNo ratings yet
- Om Vector Helmholtz Equation To Scalar Wave EquationDocument3 pagesOm Vector Helmholtz Equation To Scalar Wave EquationfaisalbanNo ratings yet
- Black Hole - LessonDocument6 pagesBlack Hole - LessonShweta JainNo ratings yet
- PHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Document1 pagePHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Supratim RoyNo ratings yet
- A Dynamical Approach To Random Matrix Theory PDFDocument239 pagesA Dynamical Approach To Random Matrix Theory PDFPhong VânNo ratings yet
- Matrix2DOperations PDFDocument1 pageMatrix2DOperations PDFTheGRaveNo ratings yet
- BookletDocument35 pagesBookletLuca Selva CampobassoNo ratings yet
- Vector ExamplesDocument7 pagesVector Examplesanon1992No ratings yet
- Booster Class-2.3/4 Class Notes Booster Class-2.3/4 Class NotesDocument19 pagesBooster Class-2.3/4 Class Notes Booster Class-2.3/4 Class NotesGautamSinghNo ratings yet
- Inorganic Chemistry HomeworkDocument3 pagesInorganic Chemistry HomeworkAlpNo ratings yet
- Laser Cooling and Trapping of Neutral AtomsDocument79 pagesLaser Cooling and Trapping of Neutral AtomsNacer ItourarNo ratings yet
- Thomson's Cathode Ray Tube LabDocument20 pagesThomson's Cathode Ray Tube LabKunbi SantosNo ratings yet
- Intro To Phonons-CastepDocument57 pagesIntro To Phonons-CastepgadasNo ratings yet
- Conservation Laws: These Are Absolute Conservation Laws: They Are Always ObeyedDocument22 pagesConservation Laws: These Are Absolute Conservation Laws: They Are Always ObeyedcsarajNo ratings yet
- A-Level Physics: OCR B (Advancing Physics)Document159 pagesA-Level Physics: OCR B (Advancing Physics)Emmanuel Kachingwe PhiriNo ratings yet
- Structure of AtomDocument20 pagesStructure of AtomSachin KumarNo ratings yet
- Intersection Theory NotesDocument68 pagesIntersection Theory NotesChor Yin HoNo ratings yet