
Network Reconfiguration For Loss Reduction in Electrical Distribution System Using Genetic Algorithm Thesis
Network Reconfiguration For Loss Reduction in Electrical Distribution System Using Genetic Algorithm Thesis
You might also like
- Battery Replacement Manual (DOC0945) R01-000Document21 pagesBattery Replacement Manual (DOC0945) R01-000874895No ratings yet
- Manual Unity Pro PDFDocument612 pagesManual Unity Pro PDFThais Pontes0% (2)
- Efficient Charging of Battery and Production of PowerDocument7 pagesEfficient Charging of Battery and Production of Powermohan venkatNo ratings yet
- Simulation and Implementation of Grid-Connected InvertersDocument10 pagesSimulation and Implementation of Grid-Connected Invertersgiongan342No ratings yet
- A Novel Approach Towards Parametric Assessment ofDocument13 pagesA Novel Approach Towards Parametric Assessment ofDavoud MoghadamNo ratings yet
- Ashraf Ahmed PHD 2011Document188 pagesAshraf Ahmed PHD 2011Selva KumarNo ratings yet
- IET Generation Trans Dist - 2022 - Nazari - A New Power Swing Detection Method in Power Systems With Large Scale WindDocument12 pagesIET Generation Trans Dist - 2022 - Nazari - A New Power Swing Detection Method in Power Systems With Large Scale WindmncrftactNo ratings yet
- An Automated Transmitter Positioning System For Misalignment Compensation of Capacitive-Coupled Electric VehiclesDocument13 pagesAn Automated Transmitter Positioning System For Misalignment Compensation of Capacitive-Coupled Electric VehiclesM Ziaur Rahman KhanNo ratings yet
- Combination of Adaptive and Intelligent Load Shedding Techniques For Distribution NetworkDocument6 pagesCombination of Adaptive and Intelligent Load Shedding Techniques For Distribution NetworkLylia ZennafNo ratings yet
- 1 s2.0 S0142061522005877 MainDocument16 pages1 s2.0 S0142061522005877 MainMirza MerićNo ratings yet
- Overcurrent Protection Study For A Power Network PDFDocument132 pagesOvercurrent Protection Study For A Power Network PDFprathap394No ratings yet
- A New Approach To Detecting and Classifying Multiple Faults in Ieee 14-Bus SystemDocument11 pagesA New Approach To Detecting and Classifying Multiple Faults in Ieee 14-Bus Systemابراهيم النائبNo ratings yet
- Optimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicDocument8 pagesOptimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicAdam MoodyNo ratings yet
- Energy Storage Based Low Frequency OscillationDocument10 pagesEnergy Storage Based Low Frequency OscillationbpchimeraNo ratings yet
- Comprehensive Protection Strategy For An Islanded Microgrid Using Intelligent RelaysDocument9 pagesComprehensive Protection Strategy For An Islanded Microgrid Using Intelligent Relayssuzuki.wagnor234No ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument TransformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument Transformerskhitech2002No ratings yet
- TS4 6 ArtificialNeuralNetworkBasedFaultDocument6 pagesTS4 6 ArtificialNeuralNetworkBasedFaultSubhankar BoseNo ratings yet
- Coordination of Overcurrent Relays Protection Systems For Wind Power PlantsDocument6 pagesCoordination of Overcurrent Relays Protection Systems For Wind Power PlantsSharad PatelNo ratings yet
- Mpce Feb 2023 SaDocument11 pagesMpce Feb 2023 SaDr O H GuptaNo ratings yet
- Fault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsDocument13 pagesFault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsIEEE PROJECTS MICANS INFOTECHNo ratings yet
- Impact of Distributed PV Generation On Relay Coordination and Power QualityDocument6 pagesImpact of Distributed PV Generation On Relay Coordination and Power QualityHARMET UP3 PEMATANGSIANTARNo ratings yet
- Intelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsDocument11 pagesIntelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsKarthikkeyan SNo ratings yet
- Bella 2019Document7 pagesBella 2019rabie torkiNo ratings yet
- 11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsDocument13 pages11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsAdam AlivinoNo ratings yet
- Distributed Generation On Low Voltage Distribution Network ProtectionDocument6 pagesDistributed Generation On Low Voltage Distribution Network Protectionvamsi naidaniNo ratings yet
- Representation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISDocument89 pagesRepresentation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISEdgardoKatReyesNo ratings yet
- A Modified Droop Control Method For PV Systems in Island Mode DC MicrogridDocument7 pagesA Modified Droop Control Method For PV Systems in Island Mode DC MicrogridAdlan Bagus PradanaNo ratings yet
- OC/OL Protection of Droop-Controlled and Directly Voltage-Controlled Microgrids Using TMF/ANN-based Fault Detection and DiscriminationDocument13 pagesOC/OL Protection of Droop-Controlled and Directly Voltage-Controlled Microgrids Using TMF/ANN-based Fault Detection and Discriminationamina bu bakerNo ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution NetworksAli Ahmed Ali AhmedNo ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution Networksjijo123408No ratings yet
- The Islamia University of BahawalpurDocument5 pagesThe Islamia University of BahawalpurMuhammad HuzaifaNo ratings yet
- Bhaskar 2019Document6 pagesBhaskar 2019Mahmood PashiNo ratings yet
- Adaptive Protection Combined With Machine Learning For MicrogridsDocument13 pagesAdaptive Protection Combined With Machine Learning For MicrogridsSwetankNo ratings yet
- Hardware Variability-Aware Duty Cycling For Embedded SensorsDocument13 pagesHardware Variability-Aware Duty Cycling For Embedded Sensorsanmol6237No ratings yet
- Underfrequency Load Shedding For An Islanded Distribution System With Distributed GeneratorsDocument8 pagesUnderfrequency Load Shedding For An Islanded Distribution System With Distributed GeneratorsAlexander WijesooriyaNo ratings yet
- Application of Resistive Super Conductor Fault Current Limiter For Protection of Grid-Connected DgsDocument13 pagesApplication of Resistive Super Conductor Fault Current Limiter For Protection of Grid-Connected DgsMagdi SaadawiNo ratings yet
- Fault Diagnosis in MLIDocument8 pagesFault Diagnosis in MLIGp NAYAGRAH ELECTRICALNo ratings yet
- Probabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodDocument8 pagesProbabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodCIKARANG KOTANo ratings yet
- A Lecture On Current LimiterDocument25 pagesA Lecture On Current LimiterLavanya VallbhareddyNo ratings yet
- GovernorDocument93 pagesGovernorLê Trung DũngNo ratings yet
- Electrochemical Impedance Spectroscopy State of Charge Measurement For Batteries Using Power Converter ModulationDocument5 pagesElectrochemical Impedance Spectroscopy State of Charge Measurement For Batteries Using Power Converter Modulationoishiknandi2004No ratings yet
- 1 s2.0 S0142061512000725 Main PDFDocument12 pages1 s2.0 S0142061512000725 Main PDFSai Kumar MorlaNo ratings yet
- Fault Diagnosis and Reconfiguration For Multilevel Inverter Drive Using AI-Based TechniquesDocument15 pagesFault Diagnosis and Reconfiguration For Multilevel Inverter Drive Using AI-Based TechniquesramunitNo ratings yet
- K Bhavya Psca PlagDocument57 pagesK Bhavya Psca PlagnareshNo ratings yet
- Electronics 12 02598Document23 pagesElectronics 12 02598aghyad.tahNo ratings yet
- A Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeansDocument13 pagesA Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeanspouyanNo ratings yet
- Use of Electrical Energy Storage To Improve The Voltage Stability of A Power System With Large Amount of Wind GenerationDocument6 pagesUse of Electrical Energy Storage To Improve The Voltage Stability of A Power System With Large Amount of Wind Generationreachyourdreams30No ratings yet
- IET Generation Trans Dist 2024 Momeni Using Dynamic State EstimationDocument14 pagesIET Generation Trans Dist 2024 Momeni Using Dynamic State Estimationm.rajabinasabNo ratings yet
- Fault Detection in Solar PVDocument19 pagesFault Detection in Solar PVsiju georgeNo ratings yet
- Research Online Research OnlineDocument9 pagesResearch Online Research Onlinehanaa KarawiaNo ratings yet
- Inductive Power Transfer For Charging The Electric VehicleDocument12 pagesInductive Power Transfer For Charging The Electric VehicleJashmine RachlyNo ratings yet
- Coordinated Control of The Bus Tie Switches and Power Supply Converters For Fault Protection in DC MicrogridsDocument11 pagesCoordinated Control of The Bus Tie Switches and Power Supply Converters For Fault Protection in DC Microgridsmusharraf saeedNo ratings yet
- Ijisa PaperDocument11 pagesIjisa PaperraghavNo ratings yet
- Inverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert DeconinckDocument8 pagesInverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert Deconinckali didebanNo ratings yet
- Asi 04 00063 v2Document13 pagesAsi 04 00063 v2vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvNo ratings yet
- Journal of Power Sources: Yujie Wang, Duo Yang, Xu Zhang, Zonghai ChenDocument10 pagesJournal of Power Sources: Yujie Wang, Duo Yang, Xu Zhang, Zonghai Chenmrgx666No ratings yet
- Voltage SagDocument6 pagesVoltage SagcaetanoNo ratings yet
- Advanced Electronic Circuit Breaker Techniques For The Use in Electric Vehicle Charging StationsDocument4 pagesAdvanced Electronic Circuit Breaker Techniques For The Use in Electric Vehicle Charging Stationsriad vanroosNo ratings yet
- Online Measurement of Battery Impedance Using Motor Controller ExcitationDocument10 pagesOnline Measurement of Battery Impedance Using Motor Controller ExcitationJuanMartinezNo ratings yet
- Rezaei2014 PDFDocument6 pagesRezaei2014 PDFFelipe Mafioletti SchuartzNo ratings yet
- Synopsis MONALI - NEW 2016Document15 pagesSynopsis MONALI - NEW 2016umesh kubdeNo ratings yet
- On-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsFrom EverandOn-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsNo ratings yet
- FL 2011Document84 pagesFL 2011abera alemayehuNo ratings yet
- Chapter OneDocument56 pagesChapter Oneabera alemayehuNo ratings yet
- IC Engine Construction and Main ComponentsDocument23 pagesIC Engine Construction and Main Componentsabera alemayehuNo ratings yet
- Diesel Generator Set X2.5 Series Engine: 15 kVA - 28 kVA 50 HZ 10.8 KW - 20 KW 60 HZDocument4 pagesDiesel Generator Set X2.5 Series Engine: 15 kVA - 28 kVA 50 HZ 10.8 KW - 20 KW 60 HZabera alemayehuNo ratings yet
- Power System Reliability Evaluation Considering Cyber-Malfunctions in SubstationsDocument11 pagesPower System Reliability Evaluation Considering Cyber-Malfunctions in Substationsabera alemayehuNo ratings yet
- 139-0498-02b RPC InstructonsDocument69 pages139-0498-02b RPC Instructonsabera alemayehuNo ratings yet
- JMESTN423527321Document8 pagesJMESTN423527321abera alemayehuNo ratings yet
- Ae CK TelecommDocument8 pagesAe CK Telecommabera alemayehuNo ratings yet
- Mamdani-Type Fuzzy ControllersDocument28 pagesMamdani-Type Fuzzy Controllersabera alemayehuNo ratings yet
- Modeling and Simulation of A Dynamic VolDocument50 pagesModeling and Simulation of A Dynamic Volabera alemayehuNo ratings yet
- Case Analysis of Power Quality Impact Assessment ADocument8 pagesCase Analysis of Power Quality Impact Assessment Aabera alemayehuNo ratings yet
- Introducing Reliability Based DistributiDocument4 pagesIntroducing Reliability Based Distributiabera alemayehuNo ratings yet
- Reliability Analysis of Electric Distribution System: Conference PaperDocument5 pagesReliability Analysis of Electric Distribution System: Conference Paperabera alemayehuNo ratings yet
- Ethnohistory and Culture of Tambaro of SDocument191 pagesEthnohistory and Culture of Tambaro of Sabera alemayehuNo ratings yet
- HS3151 Professional-English-I 01 - by WWW - LearnEngineering.inDocument34 pagesHS3151 Professional-English-I 01 - by WWW - LearnEngineering.inabera alemayehuNo ratings yet
- Em341-Ds-2015 06 10Document16 pagesEm341-Ds-2015 06 10abera alemayehuNo ratings yet
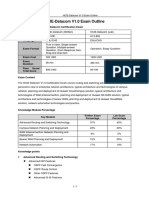
- HCIE-Datacom V1.0 Exam OutlineDocument7 pagesHCIE-Datacom V1.0 Exam Outlineabera alemayehuNo ratings yet
- Gasoline Engine R100-R440 Horizontal Shaft Service Manual: Chongqing Rato Power Manufacturing CorporationDocument78 pagesGasoline Engine R100-R440 Horizontal Shaft Service Manual: Chongqing Rato Power Manufacturing Corporationabera alemayehuNo ratings yet
- Dse7310 MkiiDocument2 pagesDse7310 Mkiiabera alemayehu0% (1)
- EM341 Installation and Use InstructionsDocument14 pagesEM341 Installation and Use Instructionsabera alemayehuNo ratings yet
- 45kva Rental Specification Diesel Generating Set: James Dring Power Plant LTDDocument3 pages45kva Rental Specification Diesel Generating Set: James Dring Power Plant LTDabera alemayehuNo ratings yet
- DG Set Installation Recommendations: Rev-05 Dated 2-Nov - 2015Document69 pagesDG Set Installation Recommendations: Rev-05 Dated 2-Nov - 2015abera alemayehu100% (1)
- Modeling and Analysis of RBTS IEEE-6 BUS System Based On Markov ChainDocument12 pagesModeling and Analysis of RBTS IEEE-6 BUS System Based On Markov Chainabera alemayehuNo ratings yet
- IRESEC2018 FinalDocument6 pagesIRESEC2018 Finalabera alemayehuNo ratings yet
- Sample 1Document1 pageSample 1abera alemayehuNo ratings yet
- Installation Manual: CM20-25 Commercial Mobile Diesel Generator Sets With PCC 1302 Manufactured in de Pere, WisconsinDocument40 pagesInstallation Manual: CM20-25 Commercial Mobile Diesel Generator Sets With PCC 1302 Manufactured in de Pere, Wisconsinabera alemayehuNo ratings yet
- Best Experaince NWR P&E For Operational ExcellenceDocument22 pagesBest Experaince NWR P&E For Operational Excellenceabera alemayehuNo ratings yet
- An Optimized Approach To Remote Telecommunications Cell Site Power SolutionDocument40 pagesAn Optimized Approach To Remote Telecommunications Cell Site Power Solutionabera alemayehuNo ratings yet
- Reliability Evaluation of Distribution Networks Using Fuzzy LogicDocument8 pagesReliability Evaluation of Distribution Networks Using Fuzzy Logicabera alemayehuNo ratings yet
- Reading: September 12, 2017 15:50 WSPC/S0218-5393 122-IJRQSE 1740006Document11 pagesReading: September 12, 2017 15:50 WSPC/S0218-5393 122-IJRQSE 1740006abera alemayehuNo ratings yet
- SSH - The Secure ShellDocument9 pagesSSH - The Secure ShellrajivNo ratings yet
- Borang Inventory ProjectDocument3 pagesBorang Inventory ProjectFAIZAL MOHAMAD TWON TAWINo ratings yet
- Dashboard - Final DocumentDocument4 pagesDashboard - Final Documentmanivarma062000No ratings yet
- Influocial Digital Portfolio-2021Document11 pagesInfluocial Digital Portfolio-2021Influocial Technologies Pvt Ltd100% (1)
- Disks and Disk Drives: in This Lesson Students WillDocument10 pagesDisks and Disk Drives: in This Lesson Students Willkyu haiNo ratings yet
- Flat R20Document4 pagesFlat R20idealnetworkdeptNo ratings yet
- Comparison of Random Forest and Gradient Boosting Fingerprints To Enhance An Outdoor Radio-Frequency Localization SystemDocument11 pagesComparison of Random Forest and Gradient Boosting Fingerprints To Enhance An Outdoor Radio-Frequency Localization SystemfuinhauserNo ratings yet
- Emmi-Lab ManualDocument43 pagesEmmi-Lab ManualNakum PrakashNo ratings yet
- Hot To Draw Comics With MidjourneyDocument10 pagesHot To Draw Comics With MidjourneyOni K.No ratings yet
- 213 Original One Liners: by Norman E. SindlingerDocument21 pages213 Original One Liners: by Norman E. SindlingerSantosh_Verma_814No ratings yet
- MainConcept TranscoderDocument6 pagesMainConcept TranscoderMarianNo ratings yet
- Types of Holding Company Structures - How To Structure - Subsidiary Engagement - PesyncDocument6 pagesTypes of Holding Company Structures - How To Structure - Subsidiary Engagement - Pesyncrahmad santosoNo ratings yet
- Wa0003.Document23 pagesWa0003.kashifmir302No ratings yet
- Alternative Assessment - EportfolioDocument4 pagesAlternative Assessment - EportfolioFrancis Oso PantinoNo ratings yet
- Fire ReviewerDocument18 pagesFire ReviewermacypearlNo ratings yet
- DBM, DBW, DBVDocument7 pagesDBM, DBW, DBVsaid shaydenNo ratings yet
- SL-700 Shing Ling Spare PartsDocument81 pagesSL-700 Shing Ling Spare Partsjoelvalera142No ratings yet
- B4U GLOBAL Group of Companies (PDF) - 1Document40 pagesB4U GLOBAL Group of Companies (PDF) - 1عبدالسبحان بھمبھانیNo ratings yet
- KivyDocument776 pagesKivyNabil SouakiNo ratings yet
- Sony - KV Da29m81 CX 1Document165 pagesSony - KV Da29m81 CX 1Anil BpsNo ratings yet
- Enfermedades ExantematicasDocument48 pagesEnfermedades ExantematicasRichard RosalesNo ratings yet
- Computer Science Project BATCH: 2021-22 Submitted To: Mr. Farroukh NadimDocument34 pagesComputer Science Project BATCH: 2021-22 Submitted To: Mr. Farroukh NadimR MNo ratings yet
- System Analysis Chap 1 MCQDocument4 pagesSystem Analysis Chap 1 MCQthienthan_javaNo ratings yet
- Data Acquisition OctetDocument438 pagesData Acquisition OctetДмитрий КорневNo ratings yet
- Model Operator'S Manual: Non Contact TonometerDocument100 pagesModel Operator'S Manual: Non Contact TonometerRitesh GuptaNo ratings yet
- Chapter TwoDocument9 pagesChapter TwoFuad AhmedNo ratings yet
- Reliability Standards - PRC-024-2Document12 pagesReliability Standards - PRC-024-2aji.isramboNo ratings yet
- PH13-5C-228-33-0050 - 66kV CABLE FEEDER - R0 - 1Document42 pagesPH13-5C-228-33-0050 - 66kV CABLE FEEDER - R0 - 1prakashNo ratings yet




















































































































Download as pdf or txt
You might also like
- Battery Replacement Manual (DOC0945) R01-000Document21 pagesBattery Replacement Manual (DOC0945) R01-000874895No ratings yet
- Manual Unity Pro PDFDocument612 pagesManual Unity Pro PDFThais Pontes0% (2)
- Efficient Charging of Battery and Production of PowerDocument7 pagesEfficient Charging of Battery and Production of Powermohan venkatNo ratings yet
- Simulation and Implementation of Grid-Connected InvertersDocument10 pagesSimulation and Implementation of Grid-Connected Invertersgiongan342No ratings yet
- A Novel Approach Towards Parametric Assessment ofDocument13 pagesA Novel Approach Towards Parametric Assessment ofDavoud MoghadamNo ratings yet
- Ashraf Ahmed PHD 2011Document188 pagesAshraf Ahmed PHD 2011Selva KumarNo ratings yet
- IET Generation Trans Dist - 2022 - Nazari - A New Power Swing Detection Method in Power Systems With Large Scale WindDocument12 pagesIET Generation Trans Dist - 2022 - Nazari - A New Power Swing Detection Method in Power Systems With Large Scale WindmncrftactNo ratings yet
- An Automated Transmitter Positioning System For Misalignment Compensation of Capacitive-Coupled Electric VehiclesDocument13 pagesAn Automated Transmitter Positioning System For Misalignment Compensation of Capacitive-Coupled Electric VehiclesM Ziaur Rahman KhanNo ratings yet
- Combination of Adaptive and Intelligent Load Shedding Techniques For Distribution NetworkDocument6 pagesCombination of Adaptive and Intelligent Load Shedding Techniques For Distribution NetworkLylia ZennafNo ratings yet
- 1 s2.0 S0142061522005877 MainDocument16 pages1 s2.0 S0142061522005877 MainMirza MerićNo ratings yet
- Overcurrent Protection Study For A Power Network PDFDocument132 pagesOvercurrent Protection Study For A Power Network PDFprathap394No ratings yet
- A New Approach To Detecting and Classifying Multiple Faults in Ieee 14-Bus SystemDocument11 pagesA New Approach To Detecting and Classifying Multiple Faults in Ieee 14-Bus Systemابراهيم النائبNo ratings yet
- Optimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicDocument8 pagesOptimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicAdam MoodyNo ratings yet
- Energy Storage Based Low Frequency OscillationDocument10 pagesEnergy Storage Based Low Frequency OscillationbpchimeraNo ratings yet
- Comprehensive Protection Strategy For An Islanded Microgrid Using Intelligent RelaysDocument9 pagesComprehensive Protection Strategy For An Islanded Microgrid Using Intelligent Relayssuzuki.wagnor234No ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument TransformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument Transformerskhitech2002No ratings yet
- TS4 6 ArtificialNeuralNetworkBasedFaultDocument6 pagesTS4 6 ArtificialNeuralNetworkBasedFaultSubhankar BoseNo ratings yet
- Coordination of Overcurrent Relays Protection Systems For Wind Power PlantsDocument6 pagesCoordination of Overcurrent Relays Protection Systems For Wind Power PlantsSharad PatelNo ratings yet
- Mpce Feb 2023 SaDocument11 pagesMpce Feb 2023 SaDr O H GuptaNo ratings yet
- Fault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsDocument13 pagesFault Detection and Protection Strategy For Islanded Inverter-Based MicrogridsIEEE PROJECTS MICANS INFOTECHNo ratings yet
- Impact of Distributed PV Generation On Relay Coordination and Power QualityDocument6 pagesImpact of Distributed PV Generation On Relay Coordination and Power QualityHARMET UP3 PEMATANGSIANTARNo ratings yet
- Intelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsDocument11 pagesIntelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsKarthikkeyan SNo ratings yet
- Bella 2019Document7 pagesBella 2019rabie torkiNo ratings yet
- 11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsDocument13 pages11 - 2023 - Harmonic Dual-Setting Directional Overcurrent Protection For Inverter-Based Islanded MicrogridsAdam AlivinoNo ratings yet
- Distributed Generation On Low Voltage Distribution Network ProtectionDocument6 pagesDistributed Generation On Low Voltage Distribution Network Protectionvamsi naidaniNo ratings yet
- Representation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISDocument89 pagesRepresentation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISEdgardoKatReyesNo ratings yet
- A Modified Droop Control Method For PV Systems in Island Mode DC MicrogridDocument7 pagesA Modified Droop Control Method For PV Systems in Island Mode DC MicrogridAdlan Bagus PradanaNo ratings yet
- OC/OL Protection of Droop-Controlled and Directly Voltage-Controlled Microgrids Using TMF/ANN-based Fault Detection and DiscriminationDocument13 pagesOC/OL Protection of Droop-Controlled and Directly Voltage-Controlled Microgrids Using TMF/ANN-based Fault Detection and Discriminationamina bu bakerNo ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution NetworksAli Ahmed Ali AhmedNo ratings yet
- Impact of Distributed Generation On The Protection of Distribution NetworksDocument4 pagesImpact of Distributed Generation On The Protection of Distribution Networksjijo123408No ratings yet
- The Islamia University of BahawalpurDocument5 pagesThe Islamia University of BahawalpurMuhammad HuzaifaNo ratings yet
- Bhaskar 2019Document6 pagesBhaskar 2019Mahmood PashiNo ratings yet
- Adaptive Protection Combined With Machine Learning For MicrogridsDocument13 pagesAdaptive Protection Combined With Machine Learning For MicrogridsSwetankNo ratings yet
- Hardware Variability-Aware Duty Cycling For Embedded SensorsDocument13 pagesHardware Variability-Aware Duty Cycling For Embedded Sensorsanmol6237No ratings yet
- Underfrequency Load Shedding For An Islanded Distribution System With Distributed GeneratorsDocument8 pagesUnderfrequency Load Shedding For An Islanded Distribution System With Distributed GeneratorsAlexander WijesooriyaNo ratings yet
- Application of Resistive Super Conductor Fault Current Limiter For Protection of Grid-Connected DgsDocument13 pagesApplication of Resistive Super Conductor Fault Current Limiter For Protection of Grid-Connected DgsMagdi SaadawiNo ratings yet
- Fault Diagnosis in MLIDocument8 pagesFault Diagnosis in MLIGp NAYAGRAH ELECTRICALNo ratings yet
- Probabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodDocument8 pagesProbabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodCIKARANG KOTANo ratings yet
- A Lecture On Current LimiterDocument25 pagesA Lecture On Current LimiterLavanya VallbhareddyNo ratings yet
- GovernorDocument93 pagesGovernorLê Trung DũngNo ratings yet
- Electrochemical Impedance Spectroscopy State of Charge Measurement For Batteries Using Power Converter ModulationDocument5 pagesElectrochemical Impedance Spectroscopy State of Charge Measurement For Batteries Using Power Converter Modulationoishiknandi2004No ratings yet
- 1 s2.0 S0142061512000725 Main PDFDocument12 pages1 s2.0 S0142061512000725 Main PDFSai Kumar MorlaNo ratings yet
- Fault Diagnosis and Reconfiguration For Multilevel Inverter Drive Using AI-Based TechniquesDocument15 pagesFault Diagnosis and Reconfiguration For Multilevel Inverter Drive Using AI-Based TechniquesramunitNo ratings yet
- K Bhavya Psca PlagDocument57 pagesK Bhavya Psca PlagnareshNo ratings yet
- Electronics 12 02598Document23 pagesElectronics 12 02598aghyad.tahNo ratings yet
- A Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeansDocument13 pagesA Fault Clearing Method in Converter-Dominated Microgrids With Conventional Protection MeanspouyanNo ratings yet
- Use of Electrical Energy Storage To Improve The Voltage Stability of A Power System With Large Amount of Wind GenerationDocument6 pagesUse of Electrical Energy Storage To Improve The Voltage Stability of A Power System With Large Amount of Wind Generationreachyourdreams30No ratings yet
- IET Generation Trans Dist 2024 Momeni Using Dynamic State EstimationDocument14 pagesIET Generation Trans Dist 2024 Momeni Using Dynamic State Estimationm.rajabinasabNo ratings yet
- Fault Detection in Solar PVDocument19 pagesFault Detection in Solar PVsiju georgeNo ratings yet
- Research Online Research OnlineDocument9 pagesResearch Online Research Onlinehanaa KarawiaNo ratings yet
- Inductive Power Transfer For Charging The Electric VehicleDocument12 pagesInductive Power Transfer For Charging The Electric VehicleJashmine RachlyNo ratings yet
- Coordinated Control of The Bus Tie Switches and Power Supply Converters For Fault Protection in DC MicrogridsDocument11 pagesCoordinated Control of The Bus Tie Switches and Power Supply Converters For Fault Protection in DC Microgridsmusharraf saeedNo ratings yet
- Ijisa PaperDocument11 pagesIjisa PaperraghavNo ratings yet
- Inverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert DeconinckDocument8 pagesInverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert Deconinckali didebanNo ratings yet
- Asi 04 00063 v2Document13 pagesAsi 04 00063 v2vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvNo ratings yet
- Journal of Power Sources: Yujie Wang, Duo Yang, Xu Zhang, Zonghai ChenDocument10 pagesJournal of Power Sources: Yujie Wang, Duo Yang, Xu Zhang, Zonghai Chenmrgx666No ratings yet
- Voltage SagDocument6 pagesVoltage SagcaetanoNo ratings yet
- Advanced Electronic Circuit Breaker Techniques For The Use in Electric Vehicle Charging StationsDocument4 pagesAdvanced Electronic Circuit Breaker Techniques For The Use in Electric Vehicle Charging Stationsriad vanroosNo ratings yet
- Online Measurement of Battery Impedance Using Motor Controller ExcitationDocument10 pagesOnline Measurement of Battery Impedance Using Motor Controller ExcitationJuanMartinezNo ratings yet
- Rezaei2014 PDFDocument6 pagesRezaei2014 PDFFelipe Mafioletti SchuartzNo ratings yet
- Synopsis MONALI - NEW 2016Document15 pagesSynopsis MONALI - NEW 2016umesh kubdeNo ratings yet
- On-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsFrom EverandOn-Chip Electro-Static Discharge (ESD) Protection for Radio-Frequency Integrated CircuitsNo ratings yet
- FL 2011Document84 pagesFL 2011abera alemayehuNo ratings yet
- Chapter OneDocument56 pagesChapter Oneabera alemayehuNo ratings yet
- IC Engine Construction and Main ComponentsDocument23 pagesIC Engine Construction and Main Componentsabera alemayehuNo ratings yet
- Diesel Generator Set X2.5 Series Engine: 15 kVA - 28 kVA 50 HZ 10.8 KW - 20 KW 60 HZDocument4 pagesDiesel Generator Set X2.5 Series Engine: 15 kVA - 28 kVA 50 HZ 10.8 KW - 20 KW 60 HZabera alemayehuNo ratings yet
- Power System Reliability Evaluation Considering Cyber-Malfunctions in SubstationsDocument11 pagesPower System Reliability Evaluation Considering Cyber-Malfunctions in Substationsabera alemayehuNo ratings yet
- 139-0498-02b RPC InstructonsDocument69 pages139-0498-02b RPC Instructonsabera alemayehuNo ratings yet
- JMESTN423527321Document8 pagesJMESTN423527321abera alemayehuNo ratings yet
- Ae CK TelecommDocument8 pagesAe CK Telecommabera alemayehuNo ratings yet
- Mamdani-Type Fuzzy ControllersDocument28 pagesMamdani-Type Fuzzy Controllersabera alemayehuNo ratings yet
- Modeling and Simulation of A Dynamic VolDocument50 pagesModeling and Simulation of A Dynamic Volabera alemayehuNo ratings yet
- Case Analysis of Power Quality Impact Assessment ADocument8 pagesCase Analysis of Power Quality Impact Assessment Aabera alemayehuNo ratings yet
- Introducing Reliability Based DistributiDocument4 pagesIntroducing Reliability Based Distributiabera alemayehuNo ratings yet
- Reliability Analysis of Electric Distribution System: Conference PaperDocument5 pagesReliability Analysis of Electric Distribution System: Conference Paperabera alemayehuNo ratings yet
- Ethnohistory and Culture of Tambaro of SDocument191 pagesEthnohistory and Culture of Tambaro of Sabera alemayehuNo ratings yet
- HS3151 Professional-English-I 01 - by WWW - LearnEngineering.inDocument34 pagesHS3151 Professional-English-I 01 - by WWW - LearnEngineering.inabera alemayehuNo ratings yet
- Em341-Ds-2015 06 10Document16 pagesEm341-Ds-2015 06 10abera alemayehuNo ratings yet
- HCIE-Datacom V1.0 Exam OutlineDocument7 pagesHCIE-Datacom V1.0 Exam Outlineabera alemayehuNo ratings yet
- Gasoline Engine R100-R440 Horizontal Shaft Service Manual: Chongqing Rato Power Manufacturing CorporationDocument78 pagesGasoline Engine R100-R440 Horizontal Shaft Service Manual: Chongqing Rato Power Manufacturing Corporationabera alemayehuNo ratings yet
- Dse7310 MkiiDocument2 pagesDse7310 Mkiiabera alemayehu0% (1)
- EM341 Installation and Use InstructionsDocument14 pagesEM341 Installation and Use Instructionsabera alemayehuNo ratings yet
- 45kva Rental Specification Diesel Generating Set: James Dring Power Plant LTDDocument3 pages45kva Rental Specification Diesel Generating Set: James Dring Power Plant LTDabera alemayehuNo ratings yet
- DG Set Installation Recommendations: Rev-05 Dated 2-Nov - 2015Document69 pagesDG Set Installation Recommendations: Rev-05 Dated 2-Nov - 2015abera alemayehu100% (1)
- Modeling and Analysis of RBTS IEEE-6 BUS System Based On Markov ChainDocument12 pagesModeling and Analysis of RBTS IEEE-6 BUS System Based On Markov Chainabera alemayehuNo ratings yet
- IRESEC2018 FinalDocument6 pagesIRESEC2018 Finalabera alemayehuNo ratings yet
- Sample 1Document1 pageSample 1abera alemayehuNo ratings yet
- Installation Manual: CM20-25 Commercial Mobile Diesel Generator Sets With PCC 1302 Manufactured in de Pere, WisconsinDocument40 pagesInstallation Manual: CM20-25 Commercial Mobile Diesel Generator Sets With PCC 1302 Manufactured in de Pere, Wisconsinabera alemayehuNo ratings yet
- Best Experaince NWR P&E For Operational ExcellenceDocument22 pagesBest Experaince NWR P&E For Operational Excellenceabera alemayehuNo ratings yet
- An Optimized Approach To Remote Telecommunications Cell Site Power SolutionDocument40 pagesAn Optimized Approach To Remote Telecommunications Cell Site Power Solutionabera alemayehuNo ratings yet
- Reliability Evaluation of Distribution Networks Using Fuzzy LogicDocument8 pagesReliability Evaluation of Distribution Networks Using Fuzzy Logicabera alemayehuNo ratings yet
- Reading: September 12, 2017 15:50 WSPC/S0218-5393 122-IJRQSE 1740006Document11 pagesReading: September 12, 2017 15:50 WSPC/S0218-5393 122-IJRQSE 1740006abera alemayehuNo ratings yet
- SSH - The Secure ShellDocument9 pagesSSH - The Secure ShellrajivNo ratings yet
- Borang Inventory ProjectDocument3 pagesBorang Inventory ProjectFAIZAL MOHAMAD TWON TAWINo ratings yet
- Dashboard - Final DocumentDocument4 pagesDashboard - Final Documentmanivarma062000No ratings yet
- Influocial Digital Portfolio-2021Document11 pagesInfluocial Digital Portfolio-2021Influocial Technologies Pvt Ltd100% (1)
- Disks and Disk Drives: in This Lesson Students WillDocument10 pagesDisks and Disk Drives: in This Lesson Students Willkyu haiNo ratings yet
- Flat R20Document4 pagesFlat R20idealnetworkdeptNo ratings yet
- Comparison of Random Forest and Gradient Boosting Fingerprints To Enhance An Outdoor Radio-Frequency Localization SystemDocument11 pagesComparison of Random Forest and Gradient Boosting Fingerprints To Enhance An Outdoor Radio-Frequency Localization SystemfuinhauserNo ratings yet
- Emmi-Lab ManualDocument43 pagesEmmi-Lab ManualNakum PrakashNo ratings yet
- Hot To Draw Comics With MidjourneyDocument10 pagesHot To Draw Comics With MidjourneyOni K.No ratings yet
- 213 Original One Liners: by Norman E. SindlingerDocument21 pages213 Original One Liners: by Norman E. SindlingerSantosh_Verma_814No ratings yet
- MainConcept TranscoderDocument6 pagesMainConcept TranscoderMarianNo ratings yet
- Types of Holding Company Structures - How To Structure - Subsidiary Engagement - PesyncDocument6 pagesTypes of Holding Company Structures - How To Structure - Subsidiary Engagement - Pesyncrahmad santosoNo ratings yet
- Wa0003.Document23 pagesWa0003.kashifmir302No ratings yet
- Alternative Assessment - EportfolioDocument4 pagesAlternative Assessment - EportfolioFrancis Oso PantinoNo ratings yet
- Fire ReviewerDocument18 pagesFire ReviewermacypearlNo ratings yet
- DBM, DBW, DBVDocument7 pagesDBM, DBW, DBVsaid shaydenNo ratings yet
- SL-700 Shing Ling Spare PartsDocument81 pagesSL-700 Shing Ling Spare Partsjoelvalera142No ratings yet
- B4U GLOBAL Group of Companies (PDF) - 1Document40 pagesB4U GLOBAL Group of Companies (PDF) - 1عبدالسبحان بھمبھانیNo ratings yet
- KivyDocument776 pagesKivyNabil SouakiNo ratings yet
- Sony - KV Da29m81 CX 1Document165 pagesSony - KV Da29m81 CX 1Anil BpsNo ratings yet
- Enfermedades ExantematicasDocument48 pagesEnfermedades ExantematicasRichard RosalesNo ratings yet
- Computer Science Project BATCH: 2021-22 Submitted To: Mr. Farroukh NadimDocument34 pagesComputer Science Project BATCH: 2021-22 Submitted To: Mr. Farroukh NadimR MNo ratings yet
- System Analysis Chap 1 MCQDocument4 pagesSystem Analysis Chap 1 MCQthienthan_javaNo ratings yet
- Data Acquisition OctetDocument438 pagesData Acquisition OctetДмитрий КорневNo ratings yet
- Model Operator'S Manual: Non Contact TonometerDocument100 pagesModel Operator'S Manual: Non Contact TonometerRitesh GuptaNo ratings yet
- Chapter TwoDocument9 pagesChapter TwoFuad AhmedNo ratings yet
- Reliability Standards - PRC-024-2Document12 pagesReliability Standards - PRC-024-2aji.isramboNo ratings yet
- PH13-5C-228-33-0050 - 66kV CABLE FEEDER - R0 - 1Document42 pagesPH13-5C-228-33-0050 - 66kV CABLE FEEDER - R0 - 1prakashNo ratings yet