Professional Documents
Culture Documents
FBN04227 Fieldbus FDS Sample
FBN04227 Fieldbus FDS Sample
Uploaded by
Jorge Pérez FrisanchoOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
FBN04227 Fieldbus FDS Sample
FBN04227 Fieldbus FDS Sample
Uploaded by
Jorge Pérez FrisanchoCopyright:
Available Formats
Foundation Fieldbus Design Specifications
Foundation Fieldbus Design Specifications
Project:
Document Number:
Y
Yokogawa Electric Corporation
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 1/25
Foundation Fieldbus Design Specifications
CONTENTS
1 Introduction.............................................................................................................................4
1-1 Scope ..................................................................................................................................... 4
1-2 Purpose.................................................................................................................................. 4
2 Definitions ...............................................................................................................................5
2-1 Definitions ............................................................................................................................. 5
2-1-1 Foundation Fieldbus Definitions ................................................................................... 5
3 Fieldbus System Overview....................................................................................................8
3-1 Project Objectives................................................................................................................. 8
3-2 Overall System Configuration .............................................................................................. 8
3-2-1 General ........................................................................................................................ 8
3-2-2 Integration of Control Function in FCS ......................................................................... 8
3-2-3 Integration of Operation and Monitoring ....................................................................... 8
3-2-4 Integrated Engineering function in YOKOGAWA CS3000 system ............................... 9
3-3 Work Flow.............................................................................................................................. 9
4 Fieldbus System Design Guidelines ..................................................................................10
4-1 General Concept of Fieldbus System Architecture .......................................................... 10
4-2 Main differences between Fieldbus and a traditional installation ................................... 11
4-2-1 Hardware ................................................................................................................... 11
4-2-2 Communication .......................................................................................................... 11
4-2-3 Protocol...................................................................................................................... 11
4-2-4 General Concept of Fieldbus System Engineering..................................................... 11
4-3 Fieldbus Application........................................................................................................... 12
4-4 Field Device Selection ........................................................................................................ 13
4-4-1 Interoperability ........................................................................................................... 13
4-4-2 Fieldbus Function Blocks ........................................................................................... 13
4-4-3 Field Device Power .................................................................................................... 14
4-4-4 Link Master Devices................................................................................................... 14
4-5 Critical Valve and Segment Definition and Design Requirement .................................... 15
4-5-1 Level 1 Valves and H1 Segments .............................................................................. 15
4-5-2 Level 2 Valves and H1 Segments .............................................................................. 15
4-5-3 Level 3 Valves and H1 Segments .............................................................................. 15
4-5-4 Level 4 H1 Segments: No control............................................................................... 15
4-5-5 Redundant or Plural Measurement in a Closed Loop................................................. 16
4-6 Control Assignment............................................................................................................ 16
4-7 Hazardous Area Classification........................................................................................... 16
4-8 Redundancy of the Fieldbus System................................................................................. 16
4-9 H1 Segment Physical Device Loading Requirements on the H1 bus.............................. 16
4-10 H1 Segment Wiring Design and Spare Philosophy .......................................................... 17
4-10-1 Overall Wiring Design and Spare Philosophy............................................................. 17
4-10-2 Cable Type ................................................................................................................ 19
4-10-3 Cable Length ............................................................................................................. 19
4-10-4 Power Consumption................................................................................................... 20
4-10-5 Minimum Operating Voltage....................................................................................... 20
4-10-6 Grounding of Fieldbus System ................................................................................... 20
4-10-7 Example Calculation .................................................................................................. 21
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 2/25
Foundation Fieldbus Design Specifications
4-11 H1 Segment Communication Performance....................................................................... 22
4-11-1 General ...................................................................................................................... 22
4-11-2 H1 Segment Communication ..................................................................................... 22
4-12 Fieldbus Field Junction Box (FFJB) Requirements.......................................................... 22
5 Fieldbus Application Design Guidelines ...........................................................................23
5-1 Naming Conventions .......................................................................................................... 23
5-1-1 Node addressing convention...................................................................................... 23
5-1-2 Physical Device tag naming convention ..................................................................... 23
5-1-3 Block naming convention ........................................................................................... 23
6 Fieldbus Documentation .....................................................................................................24
6-1 Foundation Fieldbus Documentation ................................................................................ 24
6-2 Drawings.............................................................................................................................. 24
6-2-1 Loop drawings – H1 Segment Diagrams.................................................................... 24
6-2-2 Location Drawings with Cable Routing....................................................................... 25
6-2-3 Piping and Instruments Diagram (P&ID) .................................................................... 25
6-3 Instrument Index/Database ................................................................................................ 25
6-4 Instrument Datasheets........................................................................................................ 25
6-5 Manufacturer Documentation ............................................................................................ 25
6-6 H1 Segment Checkout Form .............................................................................................. 25
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 3/25
Foundation Fieldbus Design Specifications
1 Introduction
1-1 Scope
The purpose of this specification of the Front End Design (FED) Document is to define the fundamental
コメント [KB1]: Replace by your
design guideline of Foundation Fieldbus System for the xxxxxxxx project.
project name
The specification is the basis for the Fieldbus H1 segment configuration, application software configu-
ration and for the factory acceptance test.
The approved FED Document is the basis for the application software configuration and for the factory
acceptance test. In case of conflict, the approved FED Document supersedes any other documentation.
The FED Document will refer to other project documentation as necessary. If there are exceptional cases
コメント [KB2]: Replace by your
from this document, the issues shall be subject to discussed and be approved by the customer.
customer name.
1-2 Purpose
The purpose of the specification is to define the Foundation Fieldbus System Design Requirements to:
Ensure consistency across the entire project
Simplify the overall Fieldbus implementation process
Establish adequate design of Fieldbus H1 segment
Minimize the design effort required by all parties
Define the deliverables for this project
Minimize the validation requirements
Minimize commissioning related problem
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 4/25
Foundation Fieldbus Design Specifications
2 Definitions
2-1 Definitions
2-1-1 Foundation Fieldbus Definitions
The following represent definitions of Fieldbus terms used within this specification, however, a compre-
hensive list of definitions can be found at the Foundation web site <http://www.fieldbus.org/>.
Term Definition
Acyclic Period
That portion of the communication cycle time, during which information other than Pub-
lish/Subscribe data is transmitted. Typical information transmitted during this time includes
Alarms/Events, Maintenance/Diagnostic information, Program invocations, Permissive/Interlocks,
Display information, Trend Information and Configuration.
Bus A H1 Fieldbus cable between a host and field devices.
Capabilities File
A Capabilities File describes the communication objects in a Fieldbus device. A configuration de-
vice can use Device Description (DD) Files and Capabilities Files to configure a Fieldbus system
without having the Fieldbus devices online.
Common File Format (CFF)
A software file used by the host to know the device detailed Fieldbus capabilities without requiring
the actual device.
Device Description (DD)
A Description (DD) provides an extended description of each object in the Virtual Field Device
(VFD), and includes information needed for a control system or host to understand the meaning of
data in the VFD.
Data Link Layer (DLL)
The Data Link Layer (DLL) controls transmission of messages onto the Fieldbus, and manages ac-
cess to the Fieldbus through the Link Active Scheduler (LAS). The DLL used by Foundation Field-
bus is defined in IEC 61158 and ISA S50. It includes Publisher/Subscriber, Client/Server and
Source/Sink services.
Fieldbus
A Fieldbus is a communication method that allows bidirectional and multi-drop communication link
via digital signals.
Fieldbus device
Field devices to be connected directly to Fieldbus H1 segment. Typical Fieldbus Devices are con-
trol valve positioner and transmitters.
H1 H1 is a term used to describe a Fieldbus network operating at 31.25 kbps / second.
HIST Host Interoperability Support Testing performed by the Foundation to approve Host conformance to
the Fieldbus Foundation specifications.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 5/25
Foundation Fieldbus Design Specifications
Interchangeability
Interchangeability is the capability to substitute a device from one (1) manufacturer with that of an-
other manufacturer on a Fieldbus network without loss of functionality or degree of integration.
Interoperability
Interoperability is the capability for a device from one (1) manufacturer to interact with that of an-
other manufacturer on a Fieldbus network without loss of functionality.
ITK Interoperability Test Kit used for verifying interoperability of Fieldbus devices
Link A Link is the logical medium by which Fieldbus devices are interconnected. It is composed of one
(1) or more physical interconnected H1 segments. All of the devices on a link share a common
schedule which is administered by that link’s current LAS.
Link Active Scheduler (LAS)
A Link Active Scheduler (LAS) is a deterministic, centralized bus scheduler that maintains a list of
transmission times for all data buffers in all devices that need to be cyclically transmitted. Only one
(1) Link Master (LM) device on an H1 Fieldbus Link can be functioning as that link’s LAS.
Link Master (LM)
A Link Master (LM) is any device containing Link Active Scheduler (LAS) functionality that can con-
trol communications on an H1 Fieldbus Link. There must be at least one (1) LM on an H1 Link; one
of those LM devices will be elected to serve as LAS.
Resource Block (RB)
A Resource Block (RB) describes characteristics of the Fieldbus device such as the device name,
manufacturer and serial number. There is only one (1) Resource Block (RB) in a device.
Schedules
Schedules define when Function Blocks (FBs) execute and when data and status is published on
the bus.
Segment
A segment is a section of an H1 Fieldbus that is terminated in its characteristic impedance. H1
segments can be linked by Repeaters to form a longer H1 Fieldbus. Each H1segment can include
up to 32 H1 Fieldbus devices.
Spur A Spur is an H1 branch line connecting to the Trunk via Brick that is a final circuit. A Spur can vary
in length from 1 m (3.28 ft.) to 120 m (394 ft.) as specified ISA S50.02 part 2
Standard Function Block (FB)
Standard Function Blocks (FBs) are built into Fieldbus devices as needed to achieve the desired
control functionality. Automation functions provided by Standard FBs include Analog Input (AI),
Analog Output (AO) and Proportional/Integral/Derivative (PID) control. The Fieldbus Foundation™
has released specifications for 21 types of Standard FBs. There can be many types of FBs in a de-
vice. The order and definition of Standard FB parameters are fixed and defined by the specifica-
tions.
System Management (SM)
System Management (SM) synchronizes execution of Function Blocks (FB) and the communication
of Function Block parameters on the Fieldbus, and handles publication of the time of day to all de-
vices, automatic assignment of device addresses, and searching for parameter names or “tags” on
the Fieldbus.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 6/25
Foundation Fieldbus Design Specifications
Term Definition
Terminator
A Terminator is an impedance-matching module used at or near each end of a transmission line.
Two (2) Terminators must be used on each H1 segment.
Tick Marked
Tick marked Fieldbus devices are those with validated compliance with FOUNDATION Fieldbus
specifications: ITK. The resource block contains the device approved ITK level.
Topology The segment structure; Tree, Daisy Chain, etc. are examples.
Transducer Block (TB)
A Transducer Block (TB) decouples Function Blocks (FB) from the field Input/Output (I/O) functions
required to read sensors and command output hardware. Transducer Blocks (TB) contain informa-
tion such as calibration date and sensor type. There is usually one (1) TB channel for each input or
output of a Function Block (FB).
Transmitter
A Transmitter is an active Fieldbus device containing circuitry, which applies a digital signal on the
bus.
Trunk/Home-run
A Trunk is the main communication highway between devices on an H1 Fieldbus network. The
Trunk acts as a source of main supply to Spurs on the network. A Home-run is a part of trunk cable
that is laid down between MDF in control room and 1st Fieldbus Field Junction Box (FFJB).
User Layer
The User Layer provides scheduling of Function Blocks (FB), as well as Device Descriptions (DD),
which allow the host system (DCS) to communicate with devices without the need for custom pro-
gramming.
Further information is described in reference document as TI 38K02A01-01E “YOKOGAWA Technical
Information FOUNDATION Fieldbus Book - A Tutorial”. Access to YOKOGAWA web site
<http://www.yokogawa.com/> and use search with ‘Fieldbus’ as keyword.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 7/25
Foundation Fieldbus Design Specifications
3 Fieldbus System Overview
3-1 Project Objectives
The Process Control System for the xxxx project is based on the Open System Architecture concept コメント [KB3]: Replace by your
with Foundation Fieldbus interfacing capabilities to smart devices in the process field. project name
Key driver for this technology choice is the ability to realize an infrastructure that is ready to implement
advanced diagnostics and asset management capabilities and to prepare for preventative maintenance in
future.
Spin-off advantages could be found in reducing required system cabinets space and savings on cable
procurement, installation costs, etc., but these are not the prime drivers for the technology choice.
The specifications provided in this document are intended to all concerned parties of the project in de-
signing of the Fieldbus based system with minimum effort and risks. Understanding of typical design phi-
losophy and restrictions of the Fieldbus system will realize that the system design with Fieldbus technol-
ogy does not significantly differ from a traditional technology approach.
3-2 Overall System Configuration
3-2-1 General
A Fieldbus system refers to a control system that uses a digital, two-way, multi-drop communication
link among intelligent measurement and control devices. It serves as a Local Area Network (LAN) for ad-
vanced process control, remote I/O and high speed process automation applications. With the YOKO-
GAWA CENTUM CS3000 system, it is possible to build a Fieldbus system according to the CENTUM
CS3000 engineering standard, and to operate and monitor the Fieldbus blocks of the Fieldbus devices in
the same manner as for the traditional function blocks of the Field Control Station (FCS).
By mounting a YOKOGAWA Fieldbus Communication Module (ALF111) in the YOKOGAWA FCS, it is
possible to integrate a Fieldbus system in the following manner:
3-2-2 Integration of Control Function in FCS
A Fieldbus faceplate block is part of FCS function block library that represents a Fieldbus block of a
Fieldbus device and can be expressed on a control drawing in the same manner as the FCS function
block by the system builder function. For example, if a control loop is required to be configured with the
Fieldbus blocks, the loop consists of a FF-AI, FF-PID, and FF-AO as Fieldbus faceplate blocks on the
control drawing instead of using FCS function blocks. The use of a combination of FCS function blocks
and Fieldbus Faceplate blocks is also possible.
3-2-3 Integration of Operation and Monitoring
Fieldbus blocks of the Fieldbus devices can be operated and monitored through Fieldbus faceplate
blocks in the same way as FCS function blocks are operated and monitored.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 8/25
Foundation Fieldbus Design Specifications
3-2-4 Integrated Engineering function in YOKOGAWA CS3000 system
An engineering function of YOKOGAWA CS3000 system provides both function block builder and
Fieldbus builder functions as a system builder function in order to integrate the Fieldbus system functions,
such as configuration of Fieldbus H1 segments, registration of Fieldbus devices and control drawings
containing Fieldbus faceplate blocks.
In addition, a Plant Resource Manager (PRM) function is provided. This function is an asset manage-
ment system for field devices. This function is not directly related to above engineering, operation and
monitoring functions, but is a maintenance related function with long-term data storage capability. The
PRM will efficiently handle Fieldbus devices management and maintenance works, which will reduce the
コメント [KB4]: Replace by your
Total Cost of Ownership (TCO) in plants.
system scope
Further information is described in YOKOGAWA General Specification Integrated Production Control
System CENTUM CS3000 System Overview and YOKOGAWA Fieldbus Technical Information which can
be found on the YOKOGAWA web site <http://www.yokogawa.com/> .
Figure 3-2.1: Overall System Configuration for Fieldbus System
3-3 Work Flow
The Work Flow Chart shown in Appendix-A details the required work flow for the Fieldbus engineering
of the Program as responsibilities of the Yokogawa.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 9/25
Foundation Fieldbus Design Specifications
4 Fieldbus System Design Guidelines
4-1 General Concept of Fieldbus System Architecture
Foundation Fieldbus system is an all-digital, serial, two-way communication protocol that interconnects
devices in the field such as sensors, actuators, and controllers. Fieldbus has also the capability to distrib-
ute control applications across its network in the field. Furthermore it enables advanced diagnostics and
asset management tools resulting in higher plant availability. A typical Fieldbus installation provides con-
nection from a network of field devices to a host system (DCS) via a two way, digital communication link.
The cabling and connections are arranged in a multi-drop fashion, requiring only a single pair wire with
parallel connections to field devices. This is quite different from the traditional approach of connecting 4 to
20mA devices to a DCS system using dedicated pairs of wires for each device.
Figure 4-1.1 shows the traditional dedicated pair approaches. Figure 4-1.2 shows a typical Fieldbus ar-
rangement.
Figure 4-1.1: Traditional approach to instrument connection
Figure 4-1.2: Typical Fieldbus approach to instrument connection
Two-way, multi-drop, digital
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 10/25
Foundation Fieldbus Design Specifications
Each Fieldbus run from the DCS to the field is known as a H1 segment. Each segment consists of a
trunk running from the DCS through the processing plant with parallel-connected spurs linking a brick to
Fieldbus devices such as transmitters and control valves. Fieldbus Field Junction boxes (FFJB) are used
to connect multi pair trunk cable from the Fieldbus power conditioner in control room and to extend the
trunk to subsequent FFJBs and/or bricks. Bricks are used to connect to the individual spurs with field de-
vices.
A Fieldbus power conditioner module provides power to all devices on a H1 segment.
4-2 Main differences between Fieldbus and a traditional installation
4-2-1 Hardware
The difference in cabling is one of the beneficial features of Fieldbus technology. In Fieldbus, the
power and communication is provided over the same cable with some exceptions, such as, Magnetic flow
meter.
In addition, as a result of the network configuration there are less I/O cards, I/O interface racks within
DCS cabinets and marshalling cabinets required in control room or in the Remote Instrument Enclosure
(RIE). Consequently, a reduction in the footprint for the system in control room or RIE is achieved and
installation work is faster.
Also more sensors can be integrated in one (1) Fieldbus device leading to a reduction in field devices
and/or enhanced diagnostic features.
4-2-2 Communication
Fieldbus technology is tag driven, which means that the host system checks and commissions Fieldbus
devices on basis of tags in the database and with the auto addressing of the devices, a reduction in the
loop check effort can be realized. Special Fieldbus tools are available to quickly check the adequate
communication performance of the Fieldbus H1 segments.
The data transfer is fully digital signal that does not cause of degradation of the signal accuracy
through transmission. Furthermore a higher accuracy in process control can lead to less variability and
better product quality.
4-2-3 Protocol
The Fieldbus protocol enables the adequate transfer of all types of messages such as, Process Vari-
able, status, diagnostics, etc. This coupled with the ability of the DCS to convert all these basic data into
information leads to higher plant availability and reduced maintenance costs.
However, there is a need for well-trained and qualified personnel to handle the technology changes
and exploit all the advantages.
4-2-4 General Concept of Fieldbus System Engineering
The aim of this section is to provide a design concept for the basic engineering activities to follow the
Specification phase of the project, especially H1 segment design, field device selection and cabling
schedule.
The Fieldbus system design process itself is similar to the traditional system design. However, for tradi-
tional systems, the device layouts and cable schedules are used mainly for marshalling cabinet design,
and the DCS system is designed based on I/O lists and process operation procedures, irrespective of the
cable schedule or the location of the devices and junction box.
Whereas, in case of a Fieldbus based system, the field side details, i.e. H1 segment design, do affect
the DCS design. This means that the DCS design is dependant on device layout, cable detail, i.e. H1
segment design details. Therefore, at the beginning of detailed engineering in the specification phase,
design information with respect to the layout of field instrumentation and its cable routing is required.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 11/25
Foundation Fieldbus Design Specifications
4-3 Fieldbus Application
The Fieldbus technology is used for regulatory process controls where the suitable Fieldbus devices
are available. The regulatory process control loops typically include the following:
Monitoring loops
Simple PID loops (Note 4-3(1))
Cascade loops
Sequence loops (batch processing & Continuous measurement used to create switching action)
Complex loops
Fieldbus will not be used for the following applications:
Protective Instrumentation System (PIS) and Fire & Gas Detection System (FGS) signals due to
safety reasons (Note 4-3(2))
Discrete signals, i.e. digital signals due to limited availability and lack of enhanced functionality of
such devices. (Note 4-3(3))
For this project, all PID control algorithm reside in the DCS controller (FCS) and not in the Fieldbus de- コメント [KB5]: Yokogawa Rec-
vices, unless otherwise specified. ommendation.
If the customer requires that PID
(Note 4-3(1)): PID algorithm is in principle only executed in DCS controller; FCS for the project. reside in Fieldbus devices, ex-
(Note 4-3(2)): PIS and FGS are used to prevent or mitigate hazardous events. The PIS and FGS is a plain our philosophy to the cus-
separate system. The probability of hazardous events is indicated by the SIL (Safety In- tomer agrees with our recom-
tegrity Level); SIL 0 is minimum risks and SIL 3 is high risk. The PIS and FGS should be mendation.
structured using highly reliable components. Although Fieldbus technology is highly attrac-
tive in PIS and FGS applications, the Fieldbus system has not been approved for these
applications yet. This implies that PIS/FGS applications in the project will need to apply 4-
20 mA field devices. Work is in progress to obtain Fieldbus technology approved for appli-
cations up to SIL 3. Note that for the project, HART devices operating at 4-20 mA can
multiplex HART based diagnostics signals into the plant asset management tools such as
PRM.
(Note 4-3(3)): In general, Fieldbus processing of discrete signals has two (2) drawbacks: (1) the com-
munication protocol has quite some overhead to transmit simple on/off information and (2)
the power requirement of on/off solenoids is more than standard Fieldbus power supplies
that conditioners can deliver. For these applications it is advised to consider ASI bus or
PROFIBUS DP. Only in case of monitoring discrete inputs (e.g. proximity switches) with-
out the need for local logics, a multi-points Fieldbus (MAI or MDI) approach can be con-
sidered. For the Project, Fieldbus technology for desecrate signals is not applied due to
limited availability /functionality of such devices.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 12/25
Foundation Fieldbus Design Specifications
4-4 Field Device Selection
4-4-1 Interoperability
The Fieldbus devices have to be fully interoperable with the host system (DCS: YOKOGAWA CENTUM
CS3000) including maximizing of the associated advanced diagnostic features fully coupled to the asset
management capabilities within YOKOGAWA PRM plant asset management system.
Based on the above objective, the following method applies for Fieldbus devices selection:
1st Selection - YOKOGAWA Fieldbus devices
2nd Selection - Other Fieldbus devices already tested in accordance with host system interopera-
bility support test (HIST) procedure and confirmed by YOKOGAWA as fully interoperable with the
YOKOGAWA CENTUM CS3000 system. コメント [KB6]: Yokogawa Rec-
ommendation.
In case need to consider adoption of any Fieldbus devices other than specified above in the project To reduce project risks, Yoko-
have to have the following ‘features’ available as a minimum: gawa device or tested device are
highly recommended.
Foundation Fieldbus Certification as having passed the Interoperability Test Kit (ITK), revision
4.01 or later and are listed on the approved devices list maintained on the Fieldbus Foundation コメント [KB7]: Mandatory
web site: www.Fieldbus.org
A ‘sample’ device shall be submitted to YOKOGAWA for HIST with the YOKOGAWA CENTUM
CS3000. コメント [KB8]: It is recom-
The device is capable of performing continuous diagnostics, including self-test functions, to pro- mended to test candidate device
vide specific diagnostic information to the YOKOGAWA PRM. as earlier as possible to eliminate
problems at later work phase.
4-4-2 Fieldbus Function Blocks
The Fieldbus Function Blocks (FB) as defined by the Fieldbus Foundation is grouped into standard,
Enhanced and Additional (Fieldbus Foundation Document FF-891 and FF-892), but not all of these FB’s
are appropriate for use in Fieldbus devices, and some are not available and/or do not have interoperabil-
ity tests.
For that reason the following guideline for function block selection is made:
AI - Analog Input is used in all transmitters
AO - Analog Output is used in all valve positioners
PID - Proportional/Integral/Derivative (PID algorithm is in principle only executed in DCS control-
ler; FCS for the project)
MAI - Multiple Analog Input is only used in multi channel temperature devices for monitoring ap-
plications.
For all applied function blocks it is essential to clearly define the static parameters for monitoring and
control purpose with feasible default settings, i.e. Input filter time constants, low cut filter and Calibra-
tion/measuring range etc, in accordance with the process control philosophy and requirements of the pro-
ject. The definition of proper defaults avoids tedious additional work during application software imple-
mentation, testing and subsequent commissioning / system start-up work on site.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 13/25
Foundation Fieldbus Design Specifications
The default setting parameters and data are reconfirmed during the specification phase with referring to
process application characteristic, if required.
The following parameters and data setting are specified at model selection of Fieldbus devices (i.e.
transmitter and valve positioner, etc). To specify proper parameter and data setting at order placement of
Fieldbus devices will also avoid tedious additional work during commissioning phase.
<General>
Boot_Class - BASIC (No LAS function in Fieldbus devices) コメント [KB9]: It is recom-
mended to set by manufacturer to
(Physical) DEVICE TAG - (As per instrument specification) reduce on-site work.
XD_SCALE and UNIT - (As per instrument specification)
コメント [KB10]: It is recom-
(Calibration range with unit of devices) mended to reduce on-site work.
OUT_SCALE and UNIT - (As per instrument specification)
(Measuring range with unit of devices)
Node Address - (According to actual H1 segment design) コメント [KB11]: It is recom-
mended to to reduce on-site work.
PV_FTIME - 0 sec. (Note 4-4-2 (1))
(Input damping function in Fieldbus devices)
<Pressure & Differential Pressure Transmitter for pressure application>
L_TYPE (Input signal conversion) - Direct
<Level Transmitters>
L_TYPE - Indirect Linear (0-100%)
<Differential Pressure Transmitters for flow application>
L_TYPE - Indirect SQRT
(Note 4-4-2(1)) Input signal filter function in DCS function blocks i.e. PVI and PID shall be utilized as input
damping function.
4-4-3 Field Device Power
Fieldbus devices may be powered either from the H1 segment, or locally powered, depending on the
device design. Bus-powered devices typically require 12 - 30 mA of current at between 9 and 32 volts.
Some Fieldbus devices are power polarity sensitive and therefore wiring polarity has to be maintained
for all devices.
Externally powered Fieldbus devices such as 4-wire devices are specified with isolation between exter-
nal power and Fieldbus signal inputs, if applicable.
For this project, the bus-powered method is applied unless otherwise specified.
4-4-4 Link Master Devices
No Fieldbus device will be specified as the Link Master since the redundant H1 interface cards (model:
ALF111) within the DCS provide both the active and back-up LAS functionality.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 14/25
Foundation Fieldbus Design Specifications
コメント [KB12]: This section
introduces a criticality rating ex-
4-5 Critical Valve and Segment Definition and Design Requirement ample. Criticality and design re-
quirement should be follow to
Criticality of loop and H1 segment is classified into four (4) levels as per 4-5-1 to 4-5-4. Criticality Level customer’s standard or philoso-
of each control loop is determined by the customer depending on their process requirement. Refer to phy.
Section 4-10 and 4-11 for other limitations on the number of Fieldbus devices on a H1 segment.
コメント [KB13]: Replace by
your customer name.
4-5-1 Level 1 Valves and H1 Segments
Definition:
Failure of this valve will result in causing a shutdown of the entire unit.
Application:
Level 1 Valves and their associated measurement device(s) (transmitter) shall reside on H1 segments
that are only used for Level 1 control. The H1 segment may have 1 Level 1 Valve and associated Trans-
mitter when services are independent or 2 Level 1 Valves and associated Transmitters when services are
dependent. ‘Dependent’ means that either of the 2 valves will shut down the same piece of equipment
(example pass flows on a fired heater).
To aid in assurance of interoperability, the field devices and interface cards for Level 1 shall be sup-
plied by a single vendor.
4-5-2 Level 2 Valves and H1 Segments
Definition:
Failure of a level 2 valve will result in a shutdown of the entire unit. However, the level 2 valve’s proc-
ess dynamics allow time for quick recovery from the failure, either by quickly fixing a fault or by taking
manual control. The material and energy capacity of associated vessels, geographic location, and eleva-
tion/accessibility of such valves should be considered. The difference in level 1 and 2 valves depends on
operations ability to respond to a single failure.
Application:
Level 2 valves and their associated measurement device(s) (transmitter) shall reside on H1 segments
that are only used for control. The H1 segment may have 1 Level 2 Valve and associated Transmitter(s)
when services are independent, or 2 Level 2 Valves or a Level 2 and a Level 3 Valve and associated
Transmitters when services are dependent. Dependent means that either of the 2 valves will shut down
the same piece of equipment (example: pass flows on a fired heater).
To aid in assurance of interoperability, a single vendor shall supply the field devices and interface cards
for a Level 2 design.
4-5-3 Level 3 Valves and H1 Segments
Definition:
Failure of this valve will not result in any short-term risk of total unit shutdown or major operating losses.
Level 3 valves can go to their fail position without requiring immediate operator action.
Application:
Level 3 valves can reside on a H1 segment with up to 3 other level 3 valves, or on a H1 segment with a
level 2 valve.
Fieldbus multi channel temperature device for monitoring purpose is considered as Level 3 or 4 instru-
ments.
4-5-4 Level 4 H1 Segments: No control
Definition:
Level 4 Devices are measurement only devices that shall not be used for control and may be config-
ured in a way that could interrupt control on a H1 segment. Devices in this class contain Multiple I/O
blocks.
Application:
Level 4 Devices can reside on H1 segments with up to 12 Level 4 devices only (no control).
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 15/25
Foundation Fieldbus Design Specifications
4-5-5 Redundant or Plural Measurement in a Closed Loop
Redundant measurements for control (i.e. measurement select) are distributed across separate H1
segments to increase measurement availability. However in case of Level-1 or Level-2 controls the appli-
cation definition of the respective control take precedence.
In case of plural measurements that require computation (i.e. differential, high/low selection) the meas-
urements are assigned on the same H1 segment.
Project Note: The above H1 segment definition and allocation rules are design guidelines. Physical lo-
cations and cable routing requirements may require exceptions to above rules in order to have a cost ef-
fective solution. These shall be discussed on a case by case basis to reach a conclusion.
4-6 Control Assignment
In general, control related functions are carried out in the DCS controller rather than the field devices.
PID for regulatory control algorithm is located in the DCS controllers.
4-7 Hazardous Area Classification
Hazardous area protections for this project are as follows;
FM Non incentive application: EEx (n)
EEx (n) for all devices in Group IIC Zone 2
Intrinsic safety application: EEx (ia)
EEx (ia) for all devices in Group IIC Zone 0 and 1 where applicable
Explosion Proof (Frame Proof) Application: EEx (d)
EEx (d) for all devices in Group IIc Zone 0 and 1 where applicable コメント [KB14]: Hazardous
area classification/electrical regu-
lation shall be comply to explo-
4-8 Redundancy of the Fieldbus System sion protection standards, setup
requirements and installation
Higher availability shall be achieved by implementing the following redundant components: guidelines applied in this country.
Redundant Bulk Power Supplies (24V DC) for Fieldbus Power Conditioner Modules
Redundant Fieldbus H1 Cards type ALF111 serving 4 H1 segments per pair of cards.
Redundant Fieldbus Power Conditioners modules serving 1 H1 segment per pair of power condi-
tioners. コメント [KB15]: Yokogawa
Recommendation.
4-9 H1 Segment Physical Device Loading Requirements on the H1 bus
The Fieldbus Foundation specification states that a maximum of 32 devices per H1 segment can be
connected. Up to 12 devices per a H1 segment are feasible to keep communication spare for future addi-
tion and modification of Fieldbus device diagnostics. See details in section 4-11 for Fieldbus H1 segment
communication performance.
Additionally in order to minimize the Fieldbus design effort for physical limitation check (e.g. validation)
and commissioning related problems, the numbers of devices are limited to 12 devices per H1 segment
as defined in section 4-5. This requirement is consistent with maximum loadings given with 1 second
Macrocycle time unless otherwise specified. Requirements for fast loop execution or scanning of meas-
urement (plural times scanning of measurement(s) within one (1) Macrocycle period) that conflicts with
this directive need to be discussed in specification phase.
With this limit there is no need to calculate the H1 segment load in combination with the recommended
Macrocycle of 1 second with no more than 9 transmitters and 2 closed control loops per a H1 segment as
defined in section 4-11.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 16/25
Foundation Fieldbus Design Specifications
4-10 H1 Segment Wiring Design and Spare Philosophy
コメント [KB16]: If required, add
lightning protection devices in this
4-10-1 Overall Wiring Design and Spare Philosophy section.
The basic Fieldbus H1 segment wiring design and spare philosophy of this project are as follows.
<Wiring Design Philosophy>
The Tree (Chicken-Foot) topology is adopted to compose a H1 segment as per Figure 4-10.1 in コメント [KB17]: Consider ap-
propriate topology to meet the
below.
system condition.
Figure 4-10.1: Example of Tree (Chicken Foot) topology
FJB
(Field
FF Power Junction Box) Trunk cable
ALF111 Conditioner
Spur cable
Brick Brick
MDF
Trunk cable
(Homerun)
Fieldbus power conditioner should be Make MTL/Relcom, Model F600A in this project. コメント [KB18]: Choose appro-
priate power supply to comply
The Main Distribution Frame (MDF) cabinet in each local control room (or RIE) is connected to
hazardous area classification.
the 1st Fieldbus Junction Box (FFJB) via trunk (homerun) cable.
The trunk (homerun) cable between MDF cabinet and 1st FFJB is to be ITC 18 gauge multi (20,
10 or 6) pairs, with an individually twisted and shield for each pair. (Note TC 16 gauge cable is
used only in M-Unit)
Each pair cable in multi pair trunk cable accommodates a H1 segment.
2nd/3rd FJB may be required due to the layout of Fieldbus devices within related H1 segments.
However maximum number of FFJB within a H1 segment is limited up to three (3).
The 1st FFJB shall accommodate 16, 8 or 4 numbers of distribution ways for extension of subse-
quent trunk cables of each H1 segment.
The maximum number of devices per a H1 segment does not exceed 12 as detailed in section
7.6.5.
Brick should be Make: Interlink BT, Model: JBBS-49SC-M6 (or 4) 13 for this project.
Each Fieldbus device is connected to the brick via a single pair shielded spur cable. The spur ca-
ble should be Make: Interlink BT type 490 (18 gauge single pair shielded Fieldbus type A cable)
with Minifast connector コメント [KB19]: This is an ex-
ample implementation. This sys-
tem adopts multi pairs cable for
<Spare Philosophy> trunk cable, and connector type
brick and spur cable. However
The multi-pairs homerun cable between MDF in each control room and 1st FFJB has ten percent there are many alternatives in the
(10%) spare pair(s) with a minimum of one (1) spare pair. The spare pair cables are taped it back market.
at both ends and kept in or under the MFD and FFJB.
Each H1 segment is designed with adequate spare capacity for the future addition of one (1) con-
trol loop (i.e. one (1) transmitter and one (1) final element).
No future spare capacity for Fieldbus Power conditioner (MTL: F600A) in MDF and spare slots for
installation of Fieldbus interface card (ALF111) in the FCS is required. コメント [KB20]: This is an ex-
ample. Spare capacity should be
follow to the customer’s require-
ment.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 17/25
Foundation Fieldbus Design Specifications
For easy understanding of overall wiring design and spare philosophy, an example is shown in next
page.
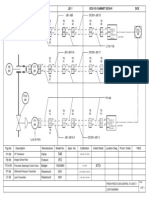
Figure 4-10.2: Wiring Design and Spare Concept for a Fieldbus H1 segment
コメント [KB21]: An example.
ALF111 Fieldbus Interface Card (No-provision of ALF111 for future Spare)
System Cables for Four (4) Fieldbus H1 Segment (No-provision of cable for future Spare)
FCS Fieldbus Field Junction Box (FFJB) is to extend Homerun cable to sub-
sequent FFJB (s) or Brick(s) with conversion function from 3 wires
ALF111 screw terminal wiring to minifast connector. (No provision of spare
terminals of Trunk cable connection in 2nd and 3rd FFJBs )
ALF111
MDF 1st FFJB
Fieldbus Homerun
Cabinet (16, 8 or 4 way)
Cable
FF Power Fieldbus Homerun Cable: ITC 18 gauge 2nd /3rd FFJB
Conditioner multi pairs cable (20, 10 or 6 pairs) with an (if necessary)
individually twisted and shield for each
pair with 10% spare pairs.
Fieldbus Trunk Cable: Interlink BT
model 490 (16 gauge single pair FF type
A cable and signal shield) with Minifast
connector
Redundant power conditioner for a
Fieldbus H1 segment (MTL model 1st Brick Brick
F600A). (No provision of FF power H1 Segment
conditioner module).
2nd Brick
H1 Segment
2nd / 3rd Brick may be used
if necessary.
Up to 12 Up to 12
Fieldbus Spur Cable: Interlink BT type FF devices FF devices
490 (16 gauge single pair shielded FF (includes one (includes one
type A cable) with Minifast connector control loop control loop
future space) future space)
: TRUNKCABLE
: SPUR CABLE
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 18/25
Foundation Fieldbus Design Specifications
4-10-2 Cable Type
In order to get maximum performance for Fieldbus network, individually shielded twisted-pair cable de-
signed especially for Fieldbus Foundation is recommended by IEC Fieldbus standard. See Table 4-10.1
for typical cable characteristics.
Table 4-10.1: Typical Fieldbus Cable Characteristics per IEC Physical Layer Standard
Wire Size 18 AWG (0.8 mm²)
Shield 90% coverage
Maximum Attenuation 3 db/km at 39 kHz
Maximum Capacitance 150 pF/m
Characteristic Impedance 100 Ohms +/- 20% at 31.25 kHz
Maximum dc Resistance 22 Ohms / Km コメント [KB22]: This shows the
characteristics of Type-A cable.
However for this project, normal instrument cables (ITC 18 gauge, multi pairs, individuals shielded) that Yokogawa recommends to use
have similar cable characteristic with typical Fieldbus type A is used for trunk cables connection between Type-A cable for new installation.
MDF and FFJBs. Interlink BT type 490 cable is used truck cable extension between FFJB and brick, and
as spur cable between brick and Fieldbus devices. The cable characteristics are as follows:
Table 4-10.2: Cable Characteristics ITC 18 Gauge for this project
Wire Size 18 AWG (0.8 mm²)
Shield 100% coverage
Maximum Attenuation 3 db/km at 39 kHz
Maximum Capacitance 50.2 pF/m
Characteristic Impedance 100 Ohms +/- 20% at 1 MHz
Maximum dc Resistance 19.22 Ohms / Km
Cable Type Specification
Trunk Cable <Between MDF and FFJBs)
ITC 18 Gauge (7 x 26) cable: twenty (20), ten (10) or six (6) multiple pairs cable, individually
twisted pairs and individually shielded (and overall Bledfoil shield with an 18 gauge (7 x 26) drain wire,
Polypropylene insulated, PVC jacket
<Between FJB and Brick>
Interlink BT type 490: Fieldbus Type A cable, ITC 18 AWG, single twisted pair and individually
shielded, PVC yellow jacket with factory molded minifast connectors コメント [KB23]: This is an ex-
ample implement.
Spur Cable Interlink BT type 490
コメント [KB24]: This is an ex-
ample implementation.
4-10-3 Cable Length
Yokogawa introduces the our
The total cable length of a H1 segment is computed by adding the length of the main trunk line and all assessment report in technical
the spurs. Information “FOUNDATION
Fieldbus Book - A Tutorial” (TI
Total H1 segment cable length = Trunk + All Spurs 38K02A01-01E)
-----
The maximum of total spur length should not exceed 120 m (ISA S50.02 part 2), but for this system, a The spur cable lengths can be
spur length limit of 30 meters (98 ft.) is recommended. increased under the following
conditions:
The total cable length of a H1 segment is limited by voltage drop and signal quality (i.e. attenuation and ·Use of Fieldbus Type A cable
distortion). In order to eliminate the need to calculate the physical loading of each H1 segment and to ·Number of field devices con-
reduce the validation requirement, the following limits are applied for the project: nected to a segment: max. 16
devices
Trunk cable length 1300 meters (4265 ft.) ·Maximum length of spur cable:
A spur cable lengths 30 meters (98 ft.), total spurs length 360 meters (1181 ft.) 120 m
·Maximum total length of spur
See section 4-10-7 for the details. cable: 960 m
·Maximum length of trunk cable:
1900 m - total length of spur ca-
ble
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 19/25
Foundation Fieldbus Design Specifications
4-10-4 Power Consumption
The maximum current supplied on a H1 segment is 350 mA that is limited by MTL F600A power condi- コメント [KB25]: Replace by the
tioners. Fieldbus devices draw currents in the range of 12 to 30 mA (on average 20 mA). With a maxi- capacity of your choice.
mum number of 12 devices per a H1 segment (i.e. 240 mA) more than sufficient margin is available to コメント [KB26]: Replace by
accommodate the required segment power. your choice.
For this project, the maximum current required by a Fieldbus device does not exceed 30mA (refer to コメント [KB27]: It depends on
section4-4-3). the FFPS capacity. e.g.) When
using IS barriers, supply current
Commentary: the current consumption of each YOKOGAWA and Dresser Fieldbus device for the pro- can drive only 3 to 4 devices.
ject use, i.e. Pressure / Differential pressure transmitter (model: EJA), Temperature transmitter (model:
YTA) and Control valve positioner (model: FVP) is specified maximum 17mA DC. Hence, up to 20 de-
vices may be theoretically connected on a H1 segment; however communication performance on a H1
segment needs to be considered for decision of number of Fieldbus devices per a H1 segment. See sec-
tion 4-11 ‘H1 segment Communication Performance’ for further details.
4-10-5 Minimum Operating Voltage
For this project, minimum voltage at the Fieldbus device for design validation purpose is 13 V dc, which
コメント [KB28]: This value is
includes a 4 V dc safety margin.
not applicable to IS application.
IS barriers limit its output voltage
4-10-6 Grounding of Fieldbus System approx. 13 V. So that, it can not
keep 13 V at the device. Possible
A Fieldbus system is susceptible to electrical noise that may be induced by electromagnetic / electro- margin may be 0.1 – 0.5 V.
static induction, from radio wave and/or ground potential differences, etc. The proper signal grounding
design and construction methods in order to prevent influence from any electrical noise will help to main-
tain required Fieldbus communication signal quality on a H1 segment.
All Fieldbus signal cores are preserved differentially throughout the network, as grounding either con-
ductor would cause all Fieldbus devices on that H1 segment to lose communications for the period that
the conductor is grounded.
The instrument shields of multi pair trunk cable are terminated and grounded at the DCS end of the H1
segment in the MDF and are not connected to ground at any other place. The instrument shield of single
pair Interlink BT type 490 trunk cable are connected to instrument shield of multi pair trunk cable at Field-
コメント [KB29]: It is an exam-
bus Field Junction Box (FFJB).
ple, but instrument shield of trunk
Fieldbus devices (case) do not connect to either conductor of the twisted pair or shield at any point in and spur should be connected at
the network. Safety (case) ground of FF devices, bricks and FFJBs are connected at each component. FFJB.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 20/25
Foundation Fieldbus Design Specifications
4-10-7 Example Calculation
To aid understanding the following considers cable length, voltage drop and power consump-
tions:
Figure 4-10.3: Example Calculation
JB (Junction Box)
Min. 25Vdc
Trunk cable
PSU (1) ITC 18 Gauge
(2) 1300m
Voltage 1
= 0.018A x 12 devices x 2wires
x (19.2ohm / 1000m) x 1300 m
= 10.78Vdc
(Note1 19.22ohm/1000m is extracted from ITC
18 gauge cable specifications.) 12 FF devices
(18mA / device at 13 V)
Voltage 2
= 0.018A x 2wires x (21.3ohm / 1000m) x 360 m
= 0.28Vdc Spur cable
(Note2 21.3ohm/1000m is extracted from Interlink BT (1) Fieldbus Type A (Interlink BT type 490:
specifications.) 18 AWG)
(2) Spur cable length: 30m per Spur
(3) Total: 360m (12devices x 30m)
Total Voltage Drop = Voltage 1 + Voltage 2
= 11.06V DC
Necessary Voltage at each FF device = 13 V DC
Hence,
Supply Voltage (25V) – Total Voltage Drop
(11.06V) > Necessary Voltage at FF device (13V)
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 21/25
Foundation Fieldbus Design Specifications
4-11 H1 Segment Communication Performance
4-11-1 General
There are two important classifications of Fieldbus communication for a feasible consideration of a H1
segment communication performance; one is ‘Periodic communication’ and another is ‘Non-Periodic
communication’. The details are shown in below.
<Periodic communication>
Scheduled communication for control/monitoring I/O
Turning parameter (view 3) updates (e.g. process alarm setting points) between Fieldbus function
block of the Fieldbus device and Fieldbus faceplate block of the DCS. (Note 4-11(1), (2))
Fieldbus Device diagnostic data communication (e.g. transmitter capsule/body temperature, valve
open/close time etc. that are contained in transducer block of Fieldbus field devices). (Note 4-
11(3))
Note 4-11(1): Data update cycle between Fieldbus device and DCS H1 segment interface card is 4 sec-
ond as system default setting.
Note 4-11(2): This communication applies also Process valuable (PV) update from Fieldbus multi chan-
nel temperature devices to DCS since Fieldbus Multiple Analog Input (MAI) function block
of the device updates process valuable from the sensors more than one (1) second cycle.
Note 4-11(3): This communication is only required in case the diagnostic data need to be indicated on
DCS display (HIS). All static and dynamic parameters that are related with Fieldbus de-
vice diagnostics are available on PRM when manually call the related display on PRM.
PRM acquires and records the device diagnostics information without assignment of
above communication. YOKOGAWA assumed that this communication is not required in
the project.
<Non periodic communication>
Alarm / event communication from Fieldbus devices
Fieldbus Parameters communication when requested on PRM manually
Fieldbus Parameters set and download when requested on host system manually
4-11-2 H1 Segment Communication
30 % of Macrocycle is recommended to keep free from periodic communication in order to maximize
execution of both periodic and non-periodic communication within one (1) Macrocycle period. This design
guidance has been acquired by YOKOGAWA based on their Fieldbus installation history and experience
so far.
A H1 segment of the project principally operates with 1 second of a Macrocycle as such; the following
definitions are applied:
Macrocycle Time - 1000msec. コメント [KB30]: Yokogawa
Recommendation.
Periodic communication Time - to be designed within 700msec.
Faster Macrocycle restricts the
Non-periodic communication Time - to be designed equal or more than 300msec. numbers of devices per segment
and choice of Field devices.
4-12 Fieldbus Field Junction Box (FFJB) Requirements
A Fieldbus Field Junction Box (FFJB) is adequately sized to contain 16, 8 or 4 ways of distribution of
H1 segments to extend trunk cable to the subsequent 2nd of 3rd FJB or Brick as per specified in section 4-
10-1.
A Brick, with integral short circuit protectors for each spur, prevents the shutdown of the entire H1 コメント [KB31]: Yokogawa
segment. On a short circuit condition, the maximum current delivered to a spur is 55 mA 24V DC, which Recommendation.
is well within the power margin per H1 segment. Short circuit protection must be
considered when designing FFJB.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 22/25
Foundation Fieldbus Design Specifications
5 Fieldbus Application Design Guidelines
5-1 Naming Conventions
5-1-1 Node addressing convention
Each FOUNDATION fieldbus node must have a unique Node Address. The Node Address is the cur-
rent address that the segment is using for the device. Each fieldbus device shall have a unique physical
device tag and corresponding network address. Table 5-1.1 shows the available address range for the
devices.
Table 5-1.1: Addresses ranges:
Node Address Device
0x14 ALF111 (left)
0x15 ALF111 (right)
0x16 – (ascending) Fieldbus devices (LM class)
0xF7 – (descending) Fieldbus devices (BASIC class)
5-1-2 Physical Device tag naming convention
Each FOUNDATION fieldbus device must have a unique physical device tag. FOUNDATION fieldbus
device tag shall match the instrument tag Indicated on P&ID.
Project Note: In a CENTUM Fieldbus system, the name of Physical Device (PD) Tag can be up to 16
コメント [KB32]: This is the re-
alphanumeric characters.
striction of CS3000.
5-1-3 Block naming convention
Each Fieldbus device contains a number of blocks. These blocks are necessary to describe and con-
tain the information for/from each device. Each block shall include as a suffix, information relative to the
function or block type for which it is defined. Table 5-1.2 illustrates a list of typical suffixes:
Table 5-1.2: Typical Block Naming Suffixes
FT5010_RB Resource block for Flow Transmitter 5010
FT5010_TX Transducer block for Flow Transmitter 5010
FT5010_AI Analog Input block for Flow Transmitter 5010
FT5010_PID PID block for Flow Transmitter 5010
FV5010_AO Analog Output block for flow control valve 5010
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 23/25
Foundation Fieldbus Design Specifications
6 Fieldbus Documentation
Documentation requirement for Fieldbus system design is the same as for a traditional system with the
following additional documents/drawings:
H1 segment Validation Report
H1 segment Drawing
See Appendix A and B for typical example of these documents.
6-1 Foundation Fieldbus Documentation
Foundation Fieldbus system design requires the same documentation as conventional control system
designs. However, some documents must be altered for Foundation Fieldbus architecture. Documenta-
tion alterations, additions, and deletions required for Fieldbus use are defined below.
The minimum document, data, and drawing requirements for Foundation Fieldbus design and installa-
tion includes the following:
Table 6-1.1: Required Documents for Fieldbus Design
Required for As Built for Perma-
S/N Document
Design nent Records
1 H1 segment (Loop) Diagram Yes Yes
2 Location Drawings with Cable Routing Yes Yes
3 Piping and Instruments Diagram (P&ID) Yes Yes
Instrument Index / Database
4 Yes Yes
with Valve Criticality List
5 Instrument Data Sheets Yes Yes
6 Material Requisitions Yes No
7 Manufacturer Documentation Yes Yes
8 H1 segment Checkout Form No No
6-2 Drawings
6-2-1 Loop drawings – H1 Segment Diagrams
When a loop is contained on a H1 segment, traditional loop drawings are replaced with H1 segment
diagrams indicating all the devices on one (1) wire pair on the same drawing. When loops contain con-
ventional I/O, a traditional loop drawing is required.
The H1 segment diagram is a hardware-wiring diagram intended to show the physical connections and
layout of the segment. Soft data including display, function block, and configuration data are not shown
on the H1 segment drawing. H1 segment diagrams include the following Fieldbus system details as
minimum:
The title block contains the ‘H1 segment name’. The segment name indicates the “Plant / Proc-
ess unit identifier with DCS Controller Domain / Station / Node / Slot / Channel number”.
All connections within a H1 segment inclusive of Fieldbus Power conditioner through the field de-
vices, terminations, Fieldbus Field junction boxes, Bricks.
Physical addresses of redundant DCS H1 interface card.
All field devices tagging, make and model name.
All spur cables are labeled with the device tag number.
All bricks numbering, make and model number
All cables numbering and distances in feet.
Terminator locations are clearly identified.
Valves and H1 segments criticality definition rating. The Drawing for Level 1 / 2 valves and seg-
ments show prominently display that “No additional devices shall be loaded on this H1 segment”.
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 24/25
Foundation Fieldbus Design Specifications
6-2-2 Location Drawings with Cable Routing
To accurately determine the length of Fieldbus trunk and spur, drawings showing where the instrument
is located in all three dimensions with Fieldbus cable routing information are required.
6-2-3 Piping and Instruments Diagram (P&ID)
Drawings that represent the process flow as well as how the instrumentation mounted to the various
pipes, vessels and equipment interact.
6-3 Instrument Index/Database
The database has the instruments information need for the instrumentation design and engineering.
6-4 Instrument Datasheets
Instrument Datasheet is used mainly for field devices model selection. The datasheet has the informa-
tion same with the data of conventional instruments. In addition, the Datasheets also has the devices or-
der information related with Fieldbus functionality that details are specified in section 4-2-4.
6-5 Manufacturer Documentation
The Fieldbus device and it related product manuals and specification include the following, and are de-
livered in electronic form:
Installation Manuals
Manufacturer specific documentation with instructions on how to install commission and maintain
the device.
Product specifications
Information on the device parameters including but not limited to function blocks (including execu-
tion time), dimensional data, power consumption, and other data as per the data sheet as a mini-
mum.
Information on how to properly install, commission and maintain the device.
Information on spare components required to support the Fieldbus specific aspects of a device.
6-6 H1 Segment Checkout Form
The H1 segment checkout form is used to identify the area of problem in case failed Fieldbus segment
communication (e.g. Fieldbus parameters down/up load from the host system has not complete success-
fully). The construction party mainly uses the form during site commissioning phase after cable and wiring
continuity check.
The major contents of the form are as follows.
Check point of general standpoint (System rev., Error messages / Download history, etc.)
Configurable H1 segment parameter check (Node address, PD Tag, Device rev, DD / cff rev, etc)
Fieldbus communication signal quality check (Noise level, Signal voltage level, Signal wave form,
etc.)
PJT Doc. No.:<FBN-04-227> Date: March 17, 2005 Page 25/25
You might also like
- CPU 265 ManualDocument96 pagesCPU 265 Manualngoctuyen,ktNo ratings yet
- Triconex FTA-MUX Cards - HPTB/32/TR-AI-01Document51 pagesTriconex FTA-MUX Cards - HPTB/32/TR-AI-01mc_prayer100% (1)
- Voting LogicDocument8 pagesVoting LogicMoralba Seijas100% (2)
- Traintools PC Communication Engineering: Publication Um5532 (1.0.0)Document78 pagesTraintools PC Communication Engineering: Publication Um5532 (1.0.0)Nawel Oran100% (2)
- Fieldbus Basics PDFDocument37 pagesFieldbus Basics PDFsalic2013No ratings yet
- PCS 7 FoundationFieldbus en en-USDocument72 pagesPCS 7 FoundationFieldbus en en-USjoseluisrosglzNo ratings yet
- EDDL or FDT-DTM PDFDocument7 pagesEDDL or FDT-DTM PDFmarioNo ratings yet
- HART Vs Foundation Fieldbus - ComparisonDocument10 pagesHART Vs Foundation Fieldbus - ComparisonrajkumarpandeyNo ratings yet
- FDT - Field Device Tool PDFDocument8 pagesFDT - Field Device Tool PDFcalripkenNo ratings yet
- Foundation Fieldbus Segment Drawing (FF Cable Schedule) - ModifDocument721 pagesFoundation Fieldbus Segment Drawing (FF Cable Schedule) - ModifLakshman KaretiNo ratings yet
- DCS Configuration, Hardware & SofwareDocument37 pagesDCS Configuration, Hardware & SofwareEngineer Naeem AkhtarNo ratings yet
- Micro Motion 5300 Mass Flow & Density Transmitter: EMERSON Process Management Educational ServicesDocument30 pagesMicro Motion 5300 Mass Flow & Density Transmitter: EMERSON Process Management Educational ServicesRENE CALLIRI MAQUERANo ratings yet
- Main Report DCSDocument26 pagesMain Report DCSjoymotiNo ratings yet
- B0193ax3 N (Function Block)Document712 pagesB0193ax3 N (Function Block)Jack YenNo ratings yet
- CENTUM VP Documents - Yokogawa Electric CorporationDocument1 pageCENTUM VP Documents - Yokogawa Electric CorporationDhirender DagarNo ratings yet
- SIS - Safety Instrumented Systems - A Practical ViewDocument4 pagesSIS - Safety Instrumented Systems - A Practical ViewMugesh KannaNo ratings yet
- Daniel Series 3800Document384 pagesDaniel Series 3800Wilmar salgado cañate100% (1)
- 854 Instruction ManualDocument66 pages854 Instruction ManualAlberto BarradasNo ratings yet
- WP SNMP in DeltaVDocument8 pagesWP SNMP in DeltaVإسماعيل محمدNo ratings yet
- TN66Document6 pagesTN66Raja BalasubramaniamNo ratings yet
- Write Protected BlockDocument1 pageWrite Protected BlockMILONo ratings yet
- Centum CS3000 TranningDocument32 pagesCentum CS3000 Tranningpuneet kumarNo ratings yet
- 3500 Manuals Datasheets 141526g PDFDocument2 pages3500 Manuals Datasheets 141526g PDFSoumen PaulNo ratings yet
- GE Druck DPI610 615 Is ManualDocument96 pagesGE Druck DPI610 615 Is Manualqasim_maqboolNo ratings yet
- Yokogawa IO Interfaces Catalogue 2009Document40 pagesYokogawa IO Interfaces Catalogue 2009aldi_crisNo ratings yet
- TRICON Product Spec PDFDocument78 pagesTRICON Product Spec PDFUdaya Kumar Krishnan100% (1)
- A Micro-Project Report ON: "Survey of Different DCS"Document10 pagesA Micro-Project Report ON: "Survey of Different DCS"Kashyap PathakNo ratings yet
- I-004 Control Valve Calibration RecordDocument1 pageI-004 Control Valve Calibration RecordAr RahmanNo ratings yet
- Yokogawa PRM Overview Rev1Document20 pagesYokogawa PRM Overview Rev1jetgo44No ratings yet
- Passive Junctions BoxesDocument4 pagesPassive Junctions BoxesErdem ÜnelNo ratings yet
- Subsea Production Control Systems: 1 ForewordDocument25 pagesSubsea Production Control Systems: 1 ForewordBSFNo ratings yet
- Mulcom TokuchuDocument32 pagesMulcom TokuchuWalid AissaNo ratings yet
- Yokogawa-Controller-Manual - Controlador Yokogawa UT 37 y Más.Document278 pagesYokogawa-Controller-Manual - Controlador Yokogawa UT 37 y Más.Xavi X QunqiNo ratings yet
- Trusted Field Loop ConfigurationDocument56 pagesTrusted Field Loop Configurationjaysonlkh100% (1)
- Partial Stroke Test Yokogawa A.F.M. Prins PDFDocument42 pagesPartial Stroke Test Yokogawa A.F.M. Prins PDFWalter Ruiz AstoNo ratings yet
- PRM Backup RestoreDocument10 pagesPRM Backup RestoreatifNo ratings yet
- Annubar Flow MeterDocument2 pagesAnnubar Flow MeterEran MeiriNo ratings yet
- Flowmeter Selection Guide: Close WindowDocument1 pageFlowmeter Selection Guide: Close Windowduong hoang tin100% (1)
- Visio Loop Diagram Cascade Loop2Document1 pageVisio Loop Diagram Cascade Loop2jmnyoungNo ratings yet
- 2.seguridad Intrinseca PDFDocument104 pages2.seguridad Intrinseca PDFerstendrainNo ratings yet
- Manual de PetDocument28 pagesManual de PetChristian Vargas CentenoNo ratings yet
- Fieldbus ActuatorsDocument12 pagesFieldbus Actuatorsvsswami_82No ratings yet
- DeltaV SIS With Electronic Marshalling Hardware Reference Guide PDFDocument115 pagesDeltaV SIS With Electronic Marshalling Hardware Reference Guide PDFQuayo Deejay100% (1)
- Yokogawa Universal IODocument6 pagesYokogawa Universal IOsinambeladavidNo ratings yet
- Trident Technical Product Guide 2011 PDFDocument58 pagesTrident Technical Product Guide 2011 PDFFred Dibnah100% (1)
- Yme 3kegDocument264 pagesYme 3kegTuan DoNo ratings yet
- Yokogawa Plant Resource ManagerDocument22 pagesYokogawa Plant Resource ManagerKoel Dey100% (1)
- ML093290420 PDFDocument326 pagesML093290420 PDFJM CrNo ratings yet
- Instructivodel Actuador Masoneilan Serie 88Document14 pagesInstructivodel Actuador Masoneilan Serie 88Jhon SanabriaNo ratings yet
- Functional Safety BookDocument68 pagesFunctional Safety BookRifyan AlanaNo ratings yet
- 0 2 Process Modeling-2Document31 pages0 2 Process Modeling-2deveshpratapchand.101421No ratings yet
- Self Tunig PIDDocument197 pagesSelf Tunig PIDEdu Daryl MacerenNo ratings yet
- PRM HART MUX ConnectivityDocument12 pagesPRM HART MUX ConnectivityShiva Prasad M PattarNo ratings yet
- 0 3 Inferential Modeling & Calibration-2Document30 pages0 3 Inferential Modeling & Calibration-2deveshpratapchand.101421No ratings yet
- White Paper Deltav Sis Standalone en 57874Document15 pagesWhite Paper Deltav Sis Standalone en 57874Đặng Trung Anh100% (1)
- Foundation Fieldbus Manual (Allen Bradley)Document184 pagesFoundation Fieldbus Manual (Allen Bradley)Thia Dewi Ratnasari100% (1)
- KDI 572-573-574 Mant. ManualDocument164 pagesKDI 572-573-574 Mant. ManualmglemNo ratings yet
- Biventing Engeneering ManualDocument312 pagesBiventing Engeneering ManualJavier BaNo ratings yet
- ICD-11 An International Classification of DiseasesDocument10 pagesICD-11 An International Classification of DiseasesMuhammad Farel Ikram MaulanaNo ratings yet
- Smith-Blair-Assessment-And-Management-Of-Neuropathic-Pain-In-Primary-Care 2Document51 pagesSmith-Blair-Assessment-And-Management-Of-Neuropathic-Pain-In-Primary-Care 2Inês Beatriz Clemente CasinhasNo ratings yet
- Drama 30 Year Plan RittingerDocument2 pagesDrama 30 Year Plan Rittingerapi-490177257No ratings yet
- Shudha Dairy Summer ProjectDocument231 pagesShudha Dairy Summer ProjectAbhishek Kumar83% (12)
- Ph0101 Unit 4 Lecture-7: Point Imperfections Line Imperfections Surface Imperfections Volume ImperfectionsDocument41 pagesPh0101 Unit 4 Lecture-7: Point Imperfections Line Imperfections Surface Imperfections Volume Imperfectionskelompok 16No ratings yet
- Tefal Kitchen Machine Users ManualDocument18 pagesTefal Kitchen Machine Users ManualMartinaNo ratings yet
- Internship PosterDocument1 pageInternship PosterJanice YizingNo ratings yet
- More Details About My Computer: Processor Memory (RAM) Graphics Gaming Graphics Primary Hard DiskDocument2 pagesMore Details About My Computer: Processor Memory (RAM) Graphics Gaming Graphics Primary Hard Diskapi-731169100% (1)
- Crippled America PDFDocument40 pagesCrippled America PDFGerardo Rogelio Alvarez100% (1)
- An5265 LT5265Document4 pagesAn5265 LT5265maldomattNo ratings yet
- ELEN 3018 - Macro Test - 2013 - ADocument1 pageELEN 3018 - Macro Test - 2013 - AsirlordbookwormNo ratings yet
- Investment ProgrammingDocument14 pagesInvestment ProgrammingDILG NagaNo ratings yet
- Acs42 Config GuideDocument214 pagesAcs42 Config GuideOtia ObaNo ratings yet
- Ensuring Ecological Integrity, Clean and Healthy EnvironmentDocument15 pagesEnsuring Ecological Integrity, Clean and Healthy EnvironmentJJNo ratings yet
- P To P CycleDocument5 pagesP To P CycleJaved AhmadNo ratings yet
- SchedulingDocument44 pagesSchedulingKonark PatelNo ratings yet
- ws23 4Document9 pagesws23 4Louis Fetilo FabunanNo ratings yet
- ProxxonDocument32 pagesProxxonZoran LazicNo ratings yet
- Competitive Strategy Notes at MBADocument26 pagesCompetitive Strategy Notes at MBABabasab Patil (Karrisatte)No ratings yet
- Peta 1Document2 pagesPeta 1Mailyn G. ElacreNo ratings yet
- Rina Floating Docks Res7-Eng2022Document28 pagesRina Floating Docks Res7-Eng2022Osman ÖzenNo ratings yet
- RCPI v. NTCDocument2 pagesRCPI v. NTCYodh Jamin OngNo ratings yet
- Future Trends in European Public Administration and Management: An Outside-In PerspectiveDocument45 pagesFuture Trends in European Public Administration and Management: An Outside-In PerspectivevickyNo ratings yet
- Debt InstrumentsDocument1 pageDebt InstrumentsKijeka HandumonNo ratings yet
- OPRKM ETEEAP Data Request As of January 24 2022Document11 pagesOPRKM ETEEAP Data Request As of January 24 2022redNo ratings yet
- Effective Learning StrategiesDocument5 pagesEffective Learning StrategiesRossy Milena JarabaNo ratings yet
- Nature Is The World Around UsDocument3 pagesNature Is The World Around UsKarthikgeyan Munesveran100% (1)
- Case Analysis JollibeeDocument5 pagesCase Analysis JollibeeMicah Charish DomingoNo ratings yet
- Principles of Marketing: Creating and Capturing Customer ValueDocument17 pagesPrinciples of Marketing: Creating and Capturing Customer ValueBusiswa MsiphanyanaNo ratings yet
- OD225273235342014000Document2 pagesOD225273235342014000Jeeva KumarNo ratings yet