Download as pdf or txt
You might also like
- Final PresentationDocument14 pagesFinal Presentationanwani nemakwaraniNo ratings yet
- Module 2Document31 pagesModule 2tarunkumarsj117No ratings yet
- UNIT-2 Computer Networks - 1Document14 pagesUNIT-2 Computer Networks - 1danaboinamadhavi234No ratings yet
- DCCN Unit-2Document31 pagesDCCN Unit-2suneelkluNo ratings yet
- Data Link Layer: - The Data Link Layer - Services Provided To The Network Layer - Framing - ErrorDocument27 pagesData Link Layer: - The Data Link Layer - Services Provided To The Network Layer - Framing - ErrorPatzzNo ratings yet
- CAP256: Computer Networks Data Link Layer - FramingDocument17 pagesCAP256: Computer Networks Data Link Layer - FramingYash jangidNo ratings yet
- 08 Data Link LayerFramingDocument17 pages08 Data Link LayerFraminganushka aroraNo ratings yet
- CN R20 Unit-2Document31 pagesCN R20 Unit-2Indreshbabu BoyaNo ratings yet
- 09 Data Link LayerFramingDocument17 pages09 Data Link LayerFramingcodingstuff18No ratings yet
- unit 2 cnDocument41 pagesunit 2 cnsiwana2bhishekNo ratings yet
- Data Link Layer Chapter-4: Figure: Relation Between Packets and FramesDocument18 pagesData Link Layer Chapter-4: Figure: Relation Between Packets and FramesAmir SilwalNo ratings yet
- Module 2 Part 1Document55 pagesModule 2 Part 1leemong335No ratings yet
- CN Unit IiDocument55 pagesCN Unit Iidhosheka123No ratings yet
- CN Unit 2Document22 pagesCN Unit 2U D A Y K I R A N G O L L ANo ratings yet
- Wa0013.Document136 pagesWa0013.nikitha.veeramalluNo ratings yet
- CNS Mod 2 DDLDocument31 pagesCNS Mod 2 DDLSamanthNo ratings yet
- Ex 2Document4 pagesEx 2Dana HaNo ratings yet
- Chapter3 Datalink LayerDocument83 pagesChapter3 Datalink LayerYaswanth JupudiNo ratings yet
- Chapter 3: Data Link LayerDocument23 pagesChapter 3: Data Link Layerjinkal patelNo ratings yet
- Unit 2Document44 pagesUnit 2Kanimozhi Suguna SNo ratings yet
- Data Communications and Multiplexing: What Is Data Transmission?Document13 pagesData Communications and Multiplexing: What Is Data Transmission?AniketNo ratings yet
- ComputerDocument56 pagesComputerskandapmwork2003No ratings yet
- Assignment-1: Internet & Multimedia TechnologyDocument6 pagesAssignment-1: Internet & Multimedia TechnologySwarnim ShuklaNo ratings yet
- Unit 2Document22 pagesUnit 2Rohit SharmaNo ratings yet
- Chapter 3 - Serial Interfacing With Microprocessor Based SystemDocument28 pagesChapter 3 - Serial Interfacing With Microprocessor Based SystemAarav PoudelNo ratings yet
- Chapter 3 Yearwise MarkingDocument25 pagesChapter 3 Yearwise Markingkaran subediNo ratings yet
- CN 2Document302 pagesCN 2Ankur AhireNo ratings yet
- CCN Module 2Document44 pagesCCN Module 2rishyanthsmNo ratings yet
- Chapter 5Document131 pagesChapter 5Markib Singh AdawitahkNo ratings yet
- High Speed Network Notes Unit 1Document12 pagesHigh Speed Network Notes Unit 1Harshit KumarNo ratings yet
- CN UNIT-3 MaterialDocument28 pagesCN UNIT-3 MaterialAparna GattimiNo ratings yet
- CN Module-IIDocument35 pagesCN Module-IIjagig81645No ratings yet
- Data Link LayerDocument50 pagesData Link LayerBindhya BibinNo ratings yet
- Chapter 2Document47 pagesChapter 2papiNo ratings yet
- Computer NetworksDocument15 pagesComputer NetworksTrevor ChinguwoNo ratings yet
- MC0075 Sem3 Smu 2011Document31 pagesMC0075 Sem3 Smu 2011Nitin SivachNo ratings yet
- Chapter 3 - Serial Interfacing With Microprocessor Based SystemDocument28 pagesChapter 3 - Serial Interfacing With Microprocessor Based SystemSuroj BurlakotiNo ratings yet
- 1-Introduction-To-Computer-Networking 3 UNITDocument106 pages1-Introduction-To-Computer-Networking 3 UNITSushma BodapatiNo ratings yet
- DCN 2 PDFDocument50 pagesDCN 2 PDFSivaraman SivaNo ratings yet
- CN Unit 2Document25 pagesCN Unit 2SaumyaNo ratings yet
- Computer Networks Assignment - LpuDocument6 pagesComputer Networks Assignment - LpuHitesh Sahani100% (1)
- Computer Networks AccessoriesDocument26 pagesComputer Networks AccessoriesSiddhant YadavNo ratings yet
- Module-2_a1Document16 pagesModule-2_a1Tahir KhanNo ratings yet
- Unit Ii: Design Issues in Data Link Layer: Error Detection and Correction: ApplicationsDocument125 pagesUnit Ii: Design Issues in Data Link Layer: Error Detection and Correction: ApplicationsNAMAN JAISWALNo ratings yet
- Notes (1)Document23 pagesNotes (1)Esha Thaniya MallaNo ratings yet
- Chapter 3Document46 pagesChapter 3Parsal SilwalNo ratings yet
- HDLC ProtocolsDocument13 pagesHDLC ProtocolsraviNo ratings yet
- CN HR Unit-II (11nov 2022)Document135 pagesCN HR Unit-II (11nov 2022)Manasa PNo ratings yet
- Data Link Layer NotesDocument101 pagesData Link Layer Notespreetham rNo ratings yet
- UntitledDocument16 pagesUntitledHimanshu RaiNo ratings yet
- Unit-IV Computer NetworkDocument14 pagesUnit-IV Computer Networkharpreetchawla7No ratings yet
- Chapter Eight Network Control and Monitoring: Circuit SwitchingDocument7 pagesChapter Eight Network Control and Monitoring: Circuit Switchingshavali56No ratings yet
- Osi & Rs232Document8 pagesOsi & Rs232dklikeNo ratings yet
- OSI Data Layer HDLC: High-Level Data Link Control: School of Engineering and Advanced Technology (SEAT)Document30 pagesOSI Data Layer HDLC: High-Level Data Link Control: School of Engineering and Advanced Technology (SEAT)deepika_srivastav_1No ratings yet
- Straight-Through Wired Cables: 2) A) What Are The Three Types of Ethernet Cables? ExplainDocument6 pagesStraight-Through Wired Cables: 2) A) What Are The Three Types of Ethernet Cables? ExplainRohit RishiNo ratings yet
- The Data Link Layer: Dr. Ajay Singh RaghuvanshiDocument29 pagesThe Data Link Layer: Dr. Ajay Singh RaghuvanshiashwinNo ratings yet
- DC Module 4 NotesDocument54 pagesDC Module 4 Notesbhatt bhattNo ratings yet
- Cns Unit2Document57 pagesCns Unit2AnuNo ratings yet
- NET 201 Module 5Document13 pagesNET 201 Module 5RickCy Perucho PccbsitNo ratings yet
- Section 8: Objectives:: Data Structures & AlgorithmsDocument7 pagesSection 8: Objectives:: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 8: Objectives:: Data Structures & AlgorithmsDocument7 pagesSection 8: Objectives:: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 6 Objectives:: Data Structures & AlgorithmsDocument12 pagesSection 6 Objectives:: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 9: Objectives:: Data Structures & AlgorithmsDocument23 pagesSection 9: Objectives:: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 7: OBJECTIVES: at The End of The Section, The Student Is Expected To Be Able ToDocument8 pagesSection 7: OBJECTIVES: at The End of The Section, The Student Is Expected To Be Able ToYT PremoneNo ratings yet
- Section 2:: Data Structures & AlgorithmsDocument9 pagesSection 2:: Data Structures & AlgorithmsYT PremoneNo ratings yet
- SECTION 1: Basic Concepts and Notations, Arrays and RecursionDocument6 pagesSECTION 1: Basic Concepts and Notations, Arrays and RecursionYT PremoneNo ratings yet
- Section 4: Data Structures & AlgorithmsDocument9 pagesSection 4: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 5: Data Structures & AlgorithmsDocument12 pagesSection 5: Data Structures & AlgorithmsYT PremoneNo ratings yet
- Section 3 OBJECTIVES: at The End of The Session, The Student Is Expected To Be Able ToDocument7 pagesSection 3 OBJECTIVES: at The End of The Session, The Student Is Expected To Be Able ToYT PremoneNo ratings yet
- HTML HeadingsDocument9 pagesHTML HeadingsYT PremoneNo ratings yet
- Department of Electrical and Electronic Engineering International Islamic University ChittagongDocument10 pagesDepartment of Electrical and Electronic Engineering International Islamic University ChittagongArafat FaisalNo ratings yet
- Software Requirement Engineering: Classification of Requirements & Documentation StandardsDocument67 pagesSoftware Requirement Engineering: Classification of Requirements & Documentation StandardsRabbia KhalidNo ratings yet
- Lxc7xx0 en v1.3 User ManualDocument56 pagesLxc7xx0 en v1.3 User ManualAnonymous vqsuRyNo ratings yet
- Ioa VS IocDocument5 pagesIoa VS Iockarthik.vcyberNo ratings yet
- 16f877a Programming SpecificationsDocument22 pages16f877a Programming SpecificationsJose Antonio Chocano SequeirosNo ratings yet
- Java AppletDocument11 pagesJava AppletAnubhav DuttaNo ratings yet
- Pixel Light CompositingDocument21 pagesPixel Light CompositingLucho QuemeroNo ratings yet
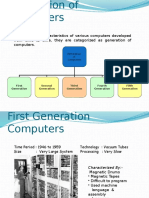
- Computer GenerationsDocument9 pagesComputer Generationsapi-321367518No ratings yet
- Microsoft: Exam Questions MS-600Document12 pagesMicrosoft: Exam Questions MS-600nomaspublicidadNo ratings yet
- OKI mb4x0ps-r2Document165 pagesOKI mb4x0ps-r2TecsaNo ratings yet
- LS2208 Datasheet PDFDocument2 pagesLS2208 Datasheet PDFPop-Coman SimionNo ratings yet
- E-Content Development PresentationDocument26 pagesE-Content Development PresentationhrishikeshanandNo ratings yet
- Robotic HandDocument13 pagesRobotic HandRoshan DodiyaNo ratings yet
- Chap 1 Introduction To ERPDocument18 pagesChap 1 Introduction To ERPZarna BaraiNo ratings yet
- Industrial Training (Cse 4389) : Submitted byDocument33 pagesIndustrial Training (Cse 4389) : Submitted byHalfNo ratings yet
- Windows System Key CombinationsDocument3 pagesWindows System Key CombinationsMiqueas Ariel García ValerioNo ratings yet
- DEVONthink Pro Office Manual PDFDocument146 pagesDEVONthink Pro Office Manual PDFnorzangNo ratings yet
- Engineering Equations Solver (EES) ManualDocument345 pagesEngineering Equations Solver (EES) Manuala44444a100% (1)
- MobileApp Checklist 2017Document21 pagesMobileApp Checklist 2017Trico AndreasNo ratings yet
- Ghost ErrDocument11 pagesGhost ErrJewell PeraltaNo ratings yet
- UCS SDK v4.0 Programmer's Manual - EngDocument267 pagesUCS SDK v4.0 Programmer's Manual - EngGod's_ServantNo ratings yet
- MultiZone Limitations and HintsDocument2 pagesMultiZone Limitations and HintsRubén Darío Becerra GalindoNo ratings yet
- Chapter 04: Risk Management True/FalseDocument14 pagesChapter 04: Risk Management True/FalseMoha AlhossanNo ratings yet
- DocumentDocument709 pagesDocumentfaiyaz432No ratings yet
- 2023+CC+Domain+5+Study+guide+by+ThorTeaches Com+v1 1Document12 pages2023+CC+Domain+5+Study+guide+by+ThorTeaches Com+v1 1AnBu DuRaINo ratings yet
- Trinh Hoang AnhDocument3 pagesTrinh Hoang AnhTraitimchanthanhNo ratings yet
- L13B - L14A-E-56 Ericsson LTE Field Guide Notification Alert - MCPC For Single Carrier and A2 Critical Change PDFDocument3 pagesL13B - L14A-E-56 Ericsson LTE Field Guide Notification Alert - MCPC For Single Carrier and A2 Critical Change PDFfridaningrumNo ratings yet
- Stairway To Data To MDXDocument54 pagesStairway To Data To MDXpatricia354No ratings yet
- Adobe Animate Classroom in A Book 2022 Release Russell Chun Full ChapterDocument54 pagesAdobe Animate Classroom in A Book 2022 Release Russell Chun Full Chaptermiguel.mckinney517100% (7)