Download as pdf or txt
You might also like
- Physics Notes For Edx 8.01X "Classical Mechanics"Document417 pagesPhysics Notes For Edx 8.01X "Classical Mechanics"ben TennessenNo ratings yet
- SQA Higher Mathematics Unit 2: SCHOLAR Study GuideDocument162 pagesSQA Higher Mathematics Unit 2: SCHOLAR Study GuideseamusNo ratings yet
- Straight Line Past Papers Unit 1 Outcome 1 AnswersDocument13 pagesStraight Line Past Papers Unit 1 Outcome 1 AnswersNarendra MupparajuNo ratings yet
- Sofistik Tutorials 2020: General Workflow Bridge DesignDocument51 pagesSofistik Tutorials 2020: General Workflow Bridge Designnepoznati1111No ratings yet
- Introductory Mathematical Analysis For Quantitative Finance 081537254x 9780815372547 CompressDocument322 pagesIntroductory Mathematical Analysis For Quantitative Finance 081537254x 9780815372547 CompressSrinivasan K100% (2)
- Tensor Short Sample SecureDocument15 pagesTensor Short Sample SecureDevendra AryaNo ratings yet
- Gaussian Processes For MachineDocument62 pagesGaussian Processes For MachineFederico GarciaNo ratings yet
- Bayes SolutionsPublicDocument37 pagesBayes SolutionsPublicmhkhan1980No ratings yet
- The Mathematics of Entanglement: Summer School at Universidad de Los AndesDocument70 pagesThe Mathematics of Entanglement: Summer School at Universidad de Los AndesDavid OrtegaNo ratings yet
- Engineering Mathematics IIDocument102 pagesEngineering Mathematics IIIsaac P PlanNo ratings yet
- Methods For Economists Lecture Notes: (In Extracts)Document55 pagesMethods For Economists Lecture Notes: (In Extracts)Roy Malpica RojasNo ratings yet
- MATH2103 For UniversityDocument101 pagesMATH2103 For UniversitySsentongo NazilNo ratings yet
- CS 532 Lecture NotesDocument25 pagesCS 532 Lecture NotesBarbaBokiNo ratings yet
- I B Maths Standard NotesDocument165 pagesI B Maths Standard NotesSivagami SaminathanNo ratings yet
- Operator Theory Project.Document32 pagesOperator Theory Project.Pintu DasNo ratings yet
- LectureNotes RBFDocument58 pagesLectureNotes RBFDaniel Cervantes CabreraNo ratings yet
- MachinelearningDocument59 pagesMachinelearningDuy AnhNo ratings yet
- I B Maths Standard NotesDocument159 pagesI B Maths Standard NotesCarl PiaoNo ratings yet
- Lectures On Differential Equations: Department of Mathematics University of California Davis, CA 95616Document169 pagesLectures On Differential Equations: Department of Mathematics University of California Davis, CA 95616osmanfıratNo ratings yet
- Course On Quantum ComputingDocument235 pagesCourse On Quantum ComputingAram ShojaeiNo ratings yet
- ODE SimulinkDocument78 pagesODE SimulinkDony AjieNo ratings yet
- ChebDocument154 pagesChebjustspam121No ratings yet
- ODE Simulink PDFDocument92 pagesODE Simulink PDFcristianNo ratings yet
- Partial Differential Equations Mathematical Techniques For EngineersDocument261 pagesPartial Differential Equations Mathematical Techniques For EngineersKannada KuvaraNo ratings yet
- Inverse ProblemsDocument45 pagesInverse ProblemsJulianDavidPulidoNo ratings yet
- Numerical Analysis Durham UNIDocument87 pagesNumerical Analysis Durham UNIAndreaNo ratings yet
- Engineering Applied MathDocument302 pagesEngineering Applied MathAnAgwgosNo ratings yet
- PDF Ordinary Differential Equations An Introduction To The Fundamentals Second Edition Edition Howell Ebook Full ChapterDocument53 pagesPDF Ordinary Differential Equations An Introduction To The Fundamentals Second Edition Edition Howell Ebook Full Chapteryolanda.bull219100% (2)
- GeaoDocument57 pagesGeaoBundeh SughnenNo ratings yet
- LB Solucionario - Mecanica de Fluidos e HidraulicaDocument153 pagesLB Solucionario - Mecanica de Fluidos e HidraulicaRobert AguedoNo ratings yet
- Spreij Measure Theoretic ProbabilityDocument169 pagesSpreij Measure Theoretic ProbabilityKapampangan ReactionaryNo ratings yet
- QFT PDFDocument529 pagesQFT PDFThiago MilogranoNo ratings yet
- Nicholas J.higham Functionsof Matrices Theory 2Document114 pagesNicholas J.higham Functionsof Matrices Theory 2D Rule LeungNo ratings yet
- Advanced Mathematical Methods in Theoretical Physics - Gernot SchallerDocument144 pagesAdvanced Mathematical Methods in Theoretical Physics - Gernot SchallerRobertNo ratings yet
- Computational Methods in Power System Analysis - Reijer Idema PDFDocument113 pagesComputational Methods in Power System Analysis - Reijer Idema PDFMichael Parohinog GregasNo ratings yet
- Basic Combinatorics: Carl G. Wagner Department of Mathematics The University of Tennessee Knoxville, TN 37996-1300Document120 pagesBasic Combinatorics: Carl G. Wagner Department of Mathematics The University of Tennessee Knoxville, TN 37996-1300rayny11100% (1)
- E-Record Mathematics Using Maxima: Sidharth. VDocument79 pagesE-Record Mathematics Using Maxima: Sidharth. VAkshitNo ratings yet
- Complex AnalysisDocument77 pagesComplex Analysisyoussof.131006No ratings yet
- Calculus For The Life Sciences - A Modeling Approach-Libro2011Document1,105 pagesCalculus For The Life Sciences - A Modeling Approach-Libro2011caligro291No ratings yet
- Computational PhysicsDocument130 pagesComputational Physicsshfgakasg100% (1)
- MATH1131-1141-Calculus-Notes-2020T1 (2020 - 10 - 19 10 - 35 - 29 UTC)Document265 pagesMATH1131-1141-Calculus-Notes-2020T1 (2020 - 10 - 19 10 - 35 - 29 UTC)shirleyNo ratings yet
- An Implementation of The Spacetime Constraints Approach To The Synthesis of Realistic MotionDocument46 pagesAn Implementation of The Spacetime Constraints Approach To The Synthesis of Realistic MotionPär WinzellNo ratings yet
- Wave 4printDocument123 pagesWave 4printfmacturboNo ratings yet
- Linear and Integer Optimization (V3C1/F4C1) : Lecture NotesDocument129 pagesLinear and Integer Optimization (V3C1/F4C1) : Lecture NotesBassem KhalidNo ratings yet
- (Download PDF) Finite Elements Ii 1St Edition Alexandre Ern Online Ebook All Chapter PDFDocument42 pages(Download PDF) Finite Elements Ii 1St Edition Alexandre Ern Online Ebook All Chapter PDFtonya.johnston703100% (9)
- Vasp ExerciseDocument29 pagesVasp ExerciseGeorges LandaNo ratings yet
- Complex NumbersDocument118 pagesComplex NumberstgifridaysNo ratings yet
- Lecture Notes Phys 326Document235 pagesLecture Notes Phys 326aaaaaaaaaaaaaaaaaaaNo ratings yet
- Thesis Frank Wagenmans 3870154Document52 pagesThesis Frank Wagenmans 3870154Gideon Eka DirgantaraNo ratings yet
- Math Methods For Physicists DocumentsDocument50 pagesMath Methods For Physicists DocumentsaiswaryaNo ratings yet
- Just For FunDocument24 pagesJust For FunThanh PhamNo ratings yet
- DifferentialEquations2420-book2013 Mod PDFDocument105 pagesDifferentialEquations2420-book2013 Mod PDFKristine DNo ratings yet
- Intro FemDocument72 pagesIntro FemCándido Serrano BuenoNo ratings yet
- Introductory Mathematical Analysis For Quantitative Finance: Daniele Ritelli and Giulia SpalettaDocument237 pagesIntroductory Mathematical Analysis For Quantitative Finance: Daniele Ritelli and Giulia SpalettaFrancescoNo ratings yet
- (Lecture Notes in Mathematics 2021) Andreas Defant (Auth.) - Classical Summation in Commutative and Noncommutative L< - Sub> - P< - Sub> - Spaces-Springer-Verlag Berlin Heidelberg (2011)Document182 pages(Lecture Notes in Mathematics 2021) Andreas Defant (Auth.) - Classical Summation in Commutative and Noncommutative L< - Sub> - P< - Sub> - Spaces-Springer-Verlag Berlin Heidelberg (2011)SumeetNo ratings yet
- EEE CAPD Lecture NotesDocument55 pagesEEE CAPD Lecture Notesviswagnya saiNo ratings yet
- Prelims Intro Calc Lecture Notes MT 2021Document68 pagesPrelims Intro Calc Lecture Notes MT 2021Russell KohNo ratings yet
- Automatic Speech and Speaker Recognition: Large Margin and Kernel MethodsFrom EverandAutomatic Speech and Speaker Recognition: Large Margin and Kernel MethodsJoseph KeshetNo ratings yet
- Quasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationFrom EverandQuasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationNo ratings yet
- Using Skellam's Distribution To Assess Soccer Team PerformanceDocument9 pagesUsing Skellam's Distribution To Assess Soccer Team PerformanceBartoszSowulNo ratings yet
- Simultaneous Determination of PB (II), Cu (II) and Ni (II) With MEDTA by Ultraviolet and Visible Derivative SpectrophotometryDocument8 pagesSimultaneous Determination of PB (II), Cu (II) and Ni (II) With MEDTA by Ultraviolet and Visible Derivative SpectrophotometryAngel LopezNo ratings yet
- Theoritical FrameworkDocument4 pagesTheoritical FrameworkBryan Clareza0% (1)
- Suan Pan ZiDocument2 pagesSuan Pan ZiJasper MeouNo ratings yet
- Serrano - Probability Distribution Test ProblemDocument6 pagesSerrano - Probability Distribution Test ProblemJosheyne Marzialli SerranoNo ratings yet
- Different Approaches To Frame Interpolation and Motion InterpolationDocument13 pagesDifferent Approaches To Frame Interpolation and Motion InterpolationJuan David Rengifo CastroNo ratings yet
- Solved SSC GD 2015 Paper With SolutionsDocument42 pagesSolved SSC GD 2015 Paper With Solutionsbraja743245No ratings yet
- Class IX Chemistry Chapter 04Document13 pagesClass IX Chemistry Chapter 04Sam FisherNo ratings yet
- 1mesh TrackDocument92 pages1mesh TrackAbdon CastroNo ratings yet
- Essentials of Corporate Finance Ross 8th Edition Solutions ManualDocument16 pagesEssentials of Corporate Finance Ross 8th Edition Solutions ManualAustinGarciaxbcti100% (95)
- Minimize The Space Required For Remote Indication: Qualitrol 105Document4 pagesMinimize The Space Required For Remote Indication: Qualitrol 105Alaa ZoraNo ratings yet
- NanoDocument47 pagesNanoMainak De100% (1)
- Fdocuments - in Chapter 1 Introduction Utoledo Wevanschap1spdfthe Machine Tool and AutomotiveDocument27 pagesFdocuments - in Chapter 1 Introduction Utoledo Wevanschap1spdfthe Machine Tool and AutomotiveFoo BrandonNo ratings yet
- On Intuitionistic Fuzzy Transportation Problem Using Pentagonal Intuitionistic Fuzzy Numbers Solved by Modi MethodDocument4 pagesOn Intuitionistic Fuzzy Transportation Problem Using Pentagonal Intuitionistic Fuzzy Numbers Solved by Modi MethodEditor IJTSRDNo ratings yet
- Voltaic Cell - Yale UniversityDocument4 pagesVoltaic Cell - Yale UniversityBelenNo ratings yet
- Chemistry Practicals VivaDocument17 pagesChemistry Practicals VivaPriyanshu BajajNo ratings yet
- Cambridge Ordinary LevelDocument20 pagesCambridge Ordinary Levelqsqt78jq6yNo ratings yet
- (23 176 of Polycrystalline Nickel: On The Mechanism of Low-Temperature OxidationDocument5 pages(23 176 of Polycrystalline Nickel: On The Mechanism of Low-Temperature OxidationPaty ChiluisaNo ratings yet
- Application of Pscad-Emtp-Phase Shifter Modeling PDFDocument2 pagesApplication of Pscad-Emtp-Phase Shifter Modeling PDFusefi100% (1)
- 04 Laws of Motion Formula Sheets Quizrr PDFDocument7 pages04 Laws of Motion Formula Sheets Quizrr PDFAryan DeNo ratings yet
- B. TECH 2nd Semester June 2019-1 PDFDocument5 pagesB. TECH 2nd Semester June 2019-1 PDFHarshitNo ratings yet
- 6.01 Exploratory Data AnalysisDocument3 pages6.01 Exploratory Data Analysisjayant khanvilkarNo ratings yet
- ERIKS - Simrit Merkel Omegat Stangafdichtingen (OMS-SPR)Document6 pagesERIKS - Simrit Merkel Omegat Stangafdichtingen (OMS-SPR)Sérgio GomesNo ratings yet
- UNIT1Document37 pagesUNIT1Azliana Mohd Taib0% (1)
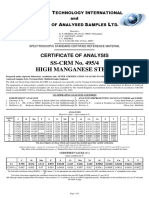
- Ss CRM 495 - 4Document2 pagesSs CRM 495 - 4lehdruk7100No ratings yet
- Activity 2: Mathematical Modeling of Physical SystemsDocument10 pagesActivity 2: Mathematical Modeling of Physical SystemsNico SilorioNo ratings yet
- Image Segmentation by Fuzzy C-Means Clustering Algorithm With A Novel Penalty Term Yong YangDocument15 pagesImage Segmentation by Fuzzy C-Means Clustering Algorithm With A Novel Penalty Term Yong Yangdragon_287No ratings yet
- Arterial Blood Gas Analysis - Hand OutsDocument3 pagesArterial Blood Gas Analysis - Hand OutsRANo ratings yet