Download as pdf or txt
You might also like
- BC-10 CatalogDocument2 pagesBC-10 CatalogDairo CarrilloNo ratings yet
- OB MBA Final Summer 22 OB MBA Final Summer 22: Test ContentDocument10 pagesOB MBA Final Summer 22 OB MBA Final Summer 22: Test ContentDUAA ALJEFFRINo ratings yet
- Lecture06 ThreadsDocument29 pagesLecture06 ThreadsDanielNo ratings yet
- UNIT 2-PART 2 (Threads)Document23 pagesUNIT 2-PART 2 (Threads)Ms. Shapna Rani E CSENo ratings yet
- Threads in Operating SystemDocument103 pagesThreads in Operating SystemMonika SahuNo ratings yet
- Operating Systems: Bits, Pilani - K. K. Birla Goa CampusDocument50 pagesOperating Systems: Bits, Pilani - K. K. Birla Goa CampusDarshan ParmarNo ratings yet
- ThreadsDocument25 pagesThreadsTâm LêNo ratings yet
- Operating System 4Document33 pagesOperating System 4Seham123123No ratings yet
- Threads: Bilkent University Department of Computer Engineering CS342 Operating SystemsDocument69 pagesThreads: Bilkent University Department of Computer Engineering CS342 Operating SystemsMuhammed NaciNo ratings yet
- Chapter 3 ProcessesDocument42 pagesChapter 3 ProcessesLusi ሉሲNo ratings yet
- System Programming - II ThreadsDocument46 pagesSystem Programming - II ThreadsAbdul Samad KhanNo ratings yet
- ThreadsDocument32 pagesThreadsNikhil TataNo ratings yet
- 05 ThreadsDocument37 pages05 Threadsomnia amirNo ratings yet
- Processes and Threads: - Processes Have Two CharacteristicsDocument35 pagesProcesses and Threads: - Processes Have Two CharacteristicsJenish PatelNo ratings yet
- 4 ThreadsDocument37 pages4 ThreadsAditi VermaNo ratings yet
- Lecture 5Document31 pagesLecture 5Dr. Muhammad RazaNo ratings yet
- Threads Unit 3Document22 pagesThreads Unit 3kaushik prajapatiNo ratings yet
- Unit - 3 - ThreadsDocument17 pagesUnit - 3 - ThreadsAyush ShresthaNo ratings yet
- Chap 4Document44 pagesChap 4alosypov21No ratings yet
- Lecture ThreadDocument45 pagesLecture ThreadMohamad YassineNo ratings yet
- Distributed SystemsDocument238 pagesDistributed SystemsOTMANE ER-RAGRAGUINo ratings yet
- Unit 4Document156 pagesUnit 4studgg78No ratings yet
- Threads: By: Hafiz TayyebDocument37 pagesThreads: By: Hafiz Tayyebtalha sheikhNo ratings yet
- ThreadsDocument24 pagesThreadsAjay Kumar RNo ratings yet
- Module 2 PptosDocument145 pagesModule 2 PptosvenugopalNo ratings yet
- Chapter 4Document45 pagesChapter 4bu.patil25No ratings yet
- Process and Threads, Presentation4Document20 pagesProcess and Threads, Presentation4Hikmatullah SaqibNo ratings yet
- Processes and Processors in Distributed SystemsDocument93 pagesProcesses and Processors in Distributed SystemsNirali DutiyaNo ratings yet
- Chapter 04Document20 pagesChapter 04Fauzan PrasetyoNo ratings yet
- ThreadsDocument47 pagesThreads21PC12 - GOKUL DNo ratings yet
- ThreadsDocument48 pagesThreadssurveyacc2023No ratings yet
- Lec 06Document18 pagesLec 06ayesha hassanNo ratings yet
- Lecture 04Document11 pagesLecture 04api-3801184No ratings yet
- Cs837: Adv. Operating Systems: Dr. Mian M.HamayunDocument19 pagesCs837: Adv. Operating Systems: Dr. Mian M.HamayunShah ZaibNo ratings yet
- Multi Threaded ProgrammingDocument18 pagesMulti Threaded Programmingnavyarajeswari911No ratings yet
- ThreadsDocument2 pagesThreadsharshimogalapalliNo ratings yet
- Processes and Their Scheduling Multiprocessor Scheduling Threads Distributed Scheduling/migrationDocument18 pagesProcesses and Their Scheduling Multiprocessor Scheduling Threads Distributed Scheduling/migrationMANOJ MNo ratings yet
- OS MOD - 2 NotesDocument44 pagesOS MOD - 2 NotesSHALINI KGNo ratings yet
- Threads: Basic Theory and Libraries: Unit of Resource OwnershipDocument33 pagesThreads: Basic Theory and Libraries: Unit of Resource OwnershipSudheera PalihakkaraNo ratings yet
- OS Threads Unit 3 Copy 1Document34 pagesOS Threads Unit 3 Copy 1Abhinay YadavNo ratings yet
- 4 OS ThreadsDocument25 pages4 OS ThreadsHanNo ratings yet
- OS Lec 5 & 6Document24 pagesOS Lec 5 & 6HasnainNo ratings yet
- ThreadsDocument16 pagesThreadscigila6437No ratings yet
- Name: Abubakr & Haseeb Tariq Subject: Operating System Topic: Threads Types & Its IssuesDocument20 pagesName: Abubakr & Haseeb Tariq Subject: Operating System Topic: Threads Types & Its IssuesBilal Khan RindNo ratings yet
- Wa0010Document42 pagesWa0010Naeem AhmedNo ratings yet
- Part 1 - Lecture 2 - Parallel HardwareDocument60 pagesPart 1 - Lecture 2 - Parallel HardwareAhmad AbbaNo ratings yet
- Operating System Lect12Document34 pagesOperating System Lect12gogochor5No ratings yet
- 2.2 DD2356 ThreadsDocument22 pages2.2 DD2356 ThreadsDaniel AraújoNo ratings yet
- Threads: by Salman Memon 2K12/IT/109 University of Sindh JamshoroDocument16 pagesThreads: by Salman Memon 2K12/IT/109 University of Sindh JamshoroP VsNo ratings yet
- Operating System (Day - 1)Document69 pagesOperating System (Day - 1)Nirajan BasnetNo ratings yet
- EE6304 Lecture12 TLPDocument70 pagesEE6304 Lecture12 TLPAshish SoniNo ratings yet
- Ch4 ThreadsDocument18 pagesCh4 ThreadsJaveria KhanNo ratings yet
- Week 4 - ThreadsDocument37 pagesWeek 4 - ThreadsCrisostomo CalitinaNo ratings yet
- OS Unit - IIDocument74 pagesOS Unit - IIDee ShanNo ratings yet
- Name: Abubakr & Haseeb Tariq Subject: Operating System Topic: Threads Types & Its IssuesDocument22 pagesName: Abubakr & Haseeb Tariq Subject: Operating System Topic: Threads Types & Its IssuesBilal Khan RindNo ratings yet
- Chapter 4Document15 pagesChapter 4MehreenAkramNo ratings yet
- Chapter 1: Multi Threaded Programming: (Operating Systems-18Cs43)Document39 pagesChapter 1: Multi Threaded Programming: (Operating Systems-18Cs43)Vaishak kamathNo ratings yet
- 4 Threads and ConcurrencyDocument62 pages4 Threads and ConcurrencyMahnoor IjazNo ratings yet
- Threads Chapter4Document51 pagesThreads Chapter4Kashish JainNo ratings yet
- Threads: Tevfik KoşarDocument40 pagesThreads: Tevfik KoşarIjazKhan100% (1)
- Lecture7 ThreadsDocument18 pagesLecture7 Threadssherpard muzuvaNo ratings yet
- Node.js, JavaScript, API: Interview Questions and AnswersFrom EverandNode.js, JavaScript, API: Interview Questions and AnswersRating: 5 out of 5 stars5/5 (1)
- Operating Systems: Thread Synchronization Primitives: ExercicesDocument8 pagesOperating Systems: Thread Synchronization Primitives: ExercicesImad IsmailNo ratings yet
- Intelligent Automation & Soft ComputingDocument8 pagesIntelligent Automation & Soft ComputingImad IsmailNo ratings yet
- Politecnico Di Torino Porto Institutional RepositoryDocument8 pagesPolitecnico Di Torino Porto Institutional RepositoryImad IsmailNo ratings yet
- Evaluating The Impact of Freespira On Panic Disorder Patients' Health Outcomes and Healthcare Costs Within The Allegheny Health NetworkDocument7 pagesEvaluating The Impact of Freespira On Panic Disorder Patients' Health Outcomes and Healthcare Costs Within The Allegheny Health NetworkImad IsmailNo ratings yet
- Lifetime Aware Solid State Disk (SSD) Cache Management For Video ServersDocument14 pagesLifetime Aware Solid State Disk (SSD) Cache Management For Video ServersImad IsmailNo ratings yet
- An Observational Study of The Implications of Influencer Culture and The Rise of MisinformationDocument3 pagesAn Observational Study of The Implications of Influencer Culture and The Rise of MisinformationSarah KhurshidNo ratings yet
- Labmate Lims Erp Product IntroductionDocument53 pagesLabmate Lims Erp Product IntroductionManohar KumarNo ratings yet
- The New Epoch - Character Sheet 2Document2 pagesThe New Epoch - Character Sheet 2Jonathan FriedmanNo ratings yet
- 2021 Ssce Internal User GuideDocument31 pages2021 Ssce Internal User GuideEffNo ratings yet
- 345Document2 pages345MiguelLalanguiNo ratings yet
- Pre-Int Unit1 Follow-upEmailDocument3 pagesPre-Int Unit1 Follow-upEmailJennifer Leal PavaNo ratings yet
- Different Types of Commands in SQLDocument3 pagesDifferent Types of Commands in SQLAbhishek DasNo ratings yet
- QA TestCases TemplateDocument29 pagesQA TestCases TemplateRafi Uddin Shaik100% (2)
- Mortality Rate: Human Conditions Before The Common ERA During The Common ERADocument2 pagesMortality Rate: Human Conditions Before The Common ERA During The Common ERAchastine daneNo ratings yet
- Math Minute 6 Pages 1 - 50 - Flip PDF Download - FlipHTML5Document112 pagesMath Minute 6 Pages 1 - 50 - Flip PDF Download - FlipHTML5saraNo ratings yet
- Iwt PracticalDocument18 pagesIwt Practical[04] - Abrar ShahNo ratings yet
- A2 - Case StudyDocument4 pagesA2 - Case StudyQerter AsphaltNo ratings yet
- Keragaan Unit Penangkap Ikan Di Kabupaten Bangka Selatan: The Performance of Fishing Unit in South Bangka RegencyDocument13 pagesKeragaan Unit Penangkap Ikan Di Kabupaten Bangka Selatan: The Performance of Fishing Unit in South Bangka RegencyAgnessNo ratings yet
- Biotech 5 Professional Thesis Kilian Duchesne Supbiotech VersionDocument44 pagesBiotech 5 Professional Thesis Kilian Duchesne Supbiotech VersionKilian DuchesneNo ratings yet
- Full Jet Powered by Baozun - 2021 China EC Digital ReportDocument12 pagesFull Jet Powered by Baozun - 2021 China EC Digital Reportzackandrian25No ratings yet
- JBL Charge 4 TL - Service Manual v1.2 [DIAGRAMAS.COM.BR]Document49 pagesJBL Charge 4 TL - Service Manual v1.2 [DIAGRAMAS.COM.BR]fabio martinNo ratings yet
- Managing Projects and Program BUS 5611 Written Assignment - 7Document6 pagesManaging Projects and Program BUS 5611 Written Assignment - 7Fahruddin ArrazyNo ratings yet
- Employment Application Form: Applicant InformationDocument2 pagesEmployment Application Form: Applicant InformationAli KamranNo ratings yet
- Yealink SIP-T27G Quick Start Guide V81 90Document8 pagesYealink SIP-T27G Quick Start Guide V81 90Ragin RamachandranNo ratings yet
- Ruchini Lakshika CVDocument2 pagesRuchini Lakshika CVapi-576408146No ratings yet
- PLC Instruction ListDocument4 pagesPLC Instruction ListPrestoneKNo ratings yet
- Design Optimization of The Lines of The Bulbous BowDocument12 pagesDesign Optimization of The Lines of The Bulbous BowFernando Raúl LADINONo ratings yet
- Filtral UVCDocument2 pagesFiltral UVCdebora maryantiNo ratings yet
- Features Include: High Pressure Gear Pump (HGP)Document2 pagesFeatures Include: High Pressure Gear Pump (HGP)Nitin ShenoyNo ratings yet
- Zika Virus Disease by SlidesgoDocument56 pagesZika Virus Disease by SlidesgoCaca Nur Salsa BilaNo ratings yet
- E Waste Management in BangladeshDocument1 pageE Waste Management in BangladeshKazi Sajharul Islam 1410028630No ratings yet
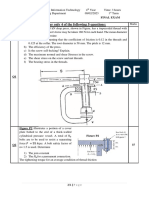
- Final ExamMDFinal 2023Document2 pagesFinal ExamMDFinal 2023khalil alhatabNo ratings yet
- SPCC EXP8 UpdatedDocument5 pagesSPCC EXP8 UpdatedApurva AnkushraoNo ratings yet

















































































![JBL Charge 4 TL - Service Manual v1.2 [DIAGRAMAS.COM.BR]](https://imgv2-2-f.scribdassets.com/img/document/747745102/149x198/e54bffb473/1720057124?v=1)