Download as pdf or txt
You might also like
- Isye 6669 Midterm I: Instructor: Prof. Shabbir Ahmed and Prof. Andy SunDocument10 pagesIsye 6669 Midterm I: Instructor: Prof. Shabbir Ahmed and Prof. Andy SunhaoNo ratings yet
- V7-AG Flight Control and Data Manage System User Manual (V4.0)Document38 pagesV7-AG Flight Control and Data Manage System User Manual (V4.0)Asdrubal Operaciones100% (2)
- Konceptualni - Titranje I ValoviDocument44 pagesKonceptualni - Titranje I ValoviNikolinaNo ratings yet
- Soal KDDocument3 pagesSoal KDtaufikkurrahman6286No ratings yet
- Chiang Ch6Document34 pagesChiang Ch6Hara Tiara PakpahanNo ratings yet
- Ma724 - 37Document6 pagesMa724 - 37sumanNo ratings yet
- Testing Hypothesis About22Document26 pagesTesting Hypothesis About22tahirajamilNo ratings yet
- Integration Using Trig IdentitiesDocument19 pagesIntegration Using Trig IdentitiesJose VillegasNo ratings yet
- Week 4 Quiz: Differential Calculus: Uses of The Derivative: Increasing and Decreasing FunctionsDocument7 pagesWeek 4 Quiz: Differential Calculus: Uses of The Derivative: Increasing and Decreasing Functionsatharva deshpandeNo ratings yet
- Designing For Low DistortionDocument9 pagesDesigning For Low DistortionЮрийNo ratings yet
- Designing For Low Distortion With High-Speed Op Amps: by James L. KarkiDocument10 pagesDesigning For Low Distortion With High-Speed Op Amps: by James L. KarkiAgfagf212No ratings yet
- MT1013 - Calculus and Analytical Geometry Exercise 2: I) Lim X X Ii) Lim y + 2 y Iii) LimDocument3 pagesMT1013 - Calculus and Analytical Geometry Exercise 2: I) Lim X X Ii) Lim y + 2 y Iii) LimAlishba TahirNo ratings yet
- Exact Differential EquationsDocument34 pagesExact Differential EquationsJose VillegasNo ratings yet
- FSDFDocument13 pagesFSDFPaolo meowNo ratings yet
- CalculusDocument24 pagesCalculusrafikdaachasalamNo ratings yet
- Maths FunctionsDocument29 pagesMaths FunctionsNasar JafriNo ratings yet
- Quadratic EquationsDocument69 pagesQuadratic EquationsAvishkar JaiswalNo ratings yet
- HeatsolnDocument2 pagesHeatsolnmayankNo ratings yet
- Problems and Solutions For Calculus 1-21Document1 pageProblems and Solutions For Calculus 1-21thcsim21convenerNo ratings yet
- Quiz 1 - Math 102 (Differential Calculus) - Psu UrdanetaDocument5 pagesQuiz 1 - Math 102 (Differential Calculus) - Psu UrdanetaJames Querimit De LunaNo ratings yet
- Section 9.1 1.: y Ae Be y Ae BeDocument2 pagesSection 9.1 1.: y Ae Be y Ae BeDaniel FernandesNo ratings yet
- Lesson 16-FDT SDT Graphing Polynomial & Rational FunctionsDocument31 pagesLesson 16-FDT SDT Graphing Polynomial & Rational FunctionsJhonnel CapuleNo ratings yet
- Examen Metodos NumericosDocument17 pagesExamen Metodos Numericos阿人个人No ratings yet
- Lect3 2Document43 pagesLect3 2matin ashrafiNo ratings yet
- Simple Linear Regression and Its Properties 82Document8 pagesSimple Linear Regression and Its Properties 82ttvignesuwarNo ratings yet
- Working Instructions: EoutputDocument16 pagesWorking Instructions: EoutputAshwin MahoneyNo ratings yet
- Exercises MEF - 6 - 2018 - SolutionDocument5 pagesExercises MEF - 6 - 2018 - SolutionrtchuidjangnanaNo ratings yet
- MAT 119A Final NotesDocument8 pagesMAT 119A Final NotesMainak ChatterjeeNo ratings yet
- 13 Chapter14Document28 pages13 Chapter14lucylee0303No ratings yet
- North South University: Dy DXDocument5 pagesNorth South University: Dy DXRifat Tasfia OtriNo ratings yet
- HBR Marketing ManagementDocument67 pagesHBR Marketing ManagementSMNo ratings yet
- Lesson 18-Analysis of Functions II Relative Extrema and Graphing PolynomialsDocument24 pagesLesson 18-Analysis of Functions II Relative Extrema and Graphing Polynomialsallyzamaevaliente012002No ratings yet
- Ridge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoDocument53 pagesRidge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoRyota TomiokaNo ratings yet
- Lec 4newton RaphsonDocument31 pagesLec 4newton Raphsonnadia.imranNo ratings yet
- 2021ADCHW02Document6 pages2021ADCHW02Jesus David Sierra TaberaNo ratings yet
- S3M Ch 24 极限(教程)2023Document16 pagesS3M Ch 24 极限(教程)2023Albert TingNo ratings yet
- Lecture 4Document26 pagesLecture 4Jordy CanalesNo ratings yet
- 2 PDFDocument15 pages2 PDFJuan Manuel Sánchez CanoNo ratings yet
- Partial Differential Equations (MA20103) Assignment - 1: y Xy Xy Ans y C X X C X X XDocument2 pagesPartial Differential Equations (MA20103) Assignment - 1: y Xy Xy Ans y C X X C X X XMainak ChakrabortyNo ratings yet
- College Algebra 4th Edition Blitzer Solutions Manual 1Document36 pagesCollege Algebra 4th Edition Blitzer Solutions Manual 1leonardkennedypaoicfbkxd100% (27)
- College Algebra 4Th Edition Blitzer Solutions Manual Full Chapter PDFDocument36 pagesCollege Algebra 4Th Edition Blitzer Solutions Manual Full Chapter PDFgloria.owens760100% (15)
- Tugas 3 KalkulusDocument5 pagesTugas 3 KalkulusBondan Wahyu PrabowoNo ratings yet
- Chapter One Limit Continuity Differentiability MAADocument41 pagesChapter One Limit Continuity Differentiability MAAAnbarin ParisaNo ratings yet
- Isye 6669 Midterm Practice: Instructors: Prof. Andy SunDocument10 pagesIsye 6669 Midterm Practice: Instructors: Prof. Andy SunhaoNo ratings yet
- Cal1Mid 1112 Sem2Document4 pagesCal1Mid 1112 Sem2Khánh My Đỗ BùiNo ratings yet
- Exercises MEF - 4 - 2018 - SolutionDocument7 pagesExercises MEF - 4 - 2018 - SolutionrtchuidjangnanaNo ratings yet
- C&P 1Document2 pagesC&P 1AliceNo ratings yet
- 2.2 Higher-Order Linear ODEDocument18 pages2.2 Higher-Order Linear ODEBenya Srisoogcharoen100% (1)
- WS-ClassXI-limits AdvanceDocument1 pageWS-ClassXI-limits Advancesm kumarNo ratings yet
- MulticollinearityDocument36 pagesMulticollinearitymath.atha.officialNo ratings yet
- Exercise2 ExactlinearizationDocument3 pagesExercise2 ExactlinearizationWangwang tanNo ratings yet
- EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020Document12 pagesEN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020SAYED JAVED ALI SHAHNo ratings yet
- Cap 12 EstadisticaDocument66 pagesCap 12 EstadisticaNadia Dayane Espinoza MamaniNo ratings yet
- Limit 05 Mirza AnggaraDocument8 pagesLimit 05 Mirza AnggaraAnggara MirzaNo ratings yet
- Revision Test 2Document39 pagesRevision Test 2Thabo InnocentNo ratings yet
- 2ND W3W4 Precalculus Las 1Document12 pages2ND W3W4 Precalculus Las 1gfam59552No ratings yet
- Hypothesis Testing in Multiple Linear Regression: BIOST 515 January 20, 2004Document28 pagesHypothesis Testing in Multiple Linear Regression: BIOST 515 January 20, 2004HazemIbrahimNo ratings yet
- MAFE208IU-L6 - Least Squares RegressionDocument47 pagesMAFE208IU-L6 - Least Squares RegressionThy VũNo ratings yet
- Numerical Analysis: University of TechnologyDocument44 pagesNumerical Analysis: University of Technologyكاظم طارقNo ratings yet
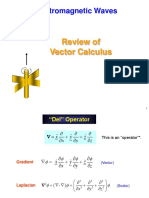
- Review of Vector CalculusDocument21 pagesReview of Vector CalculusYashwanth YashuNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- B4 - State Space Stability - SlidesDocument30 pagesB4 - State Space Stability - SlidesAli ZunairNo ratings yet
- B3 - Transfer Functions - SlidesDocument28 pagesB3 - Transfer Functions - SlidesAli ZunairNo ratings yet
- B2 - State Space Modelling - SlidesDocument29 pagesB2 - State Space Modelling - SlidesAli ZunairNo ratings yet
- B1 - Introduction To State Space - SlidesDocument37 pagesB1 - Introduction To State Space - SlidesAli ZunairNo ratings yet
- Aerodynamic Modeling and State-Space Mod PDFDocument5 pagesAerodynamic Modeling and State-Space Mod PDFAli ZunairNo ratings yet
- Grizi Et Al. GEESD - FINALDocument10 pagesGrizi Et Al. GEESD - FINALKaterineNo ratings yet
- Oq-2017-Pacheco-Optimal Decay For Coupled Waves With Kelvin-Voigt DampingDocument5 pagesOq-2017-Pacheco-Optimal Decay For Coupled Waves With Kelvin-Voigt DampingAndré mashNo ratings yet
- Mechanical Vibration Lecture 5Document50 pagesMechanical Vibration Lecture 5Mohanad Al-tahrawiNo ratings yet
- PDDC Winter 2021Document2 pagesPDDC Winter 2021Bhavesh PatelNo ratings yet
- Time Domain Analysis of 2nd Order SystemsDocument64 pagesTime Domain Analysis of 2nd Order SystemsKamran TariqNo ratings yet
- The Acoustic Doppler Effect Applied To The Study of Linear MotionsDocument12 pagesThe Acoustic Doppler Effect Applied To The Study of Linear MotionsSains Sekolah RendahNo ratings yet
- 3 - Floating Bridge Global Responses With Hydrodynamic Interaction - Xu XiangDocument14 pages3 - Floating Bridge Global Responses With Hydrodynamic Interaction - Xu Xiangpb015709No ratings yet
- 07 MeadDocument19 pages07 MeadPhamNo ratings yet
- Lesson1 Intro To DampingDocument6 pagesLesson1 Intro To DampinglucaNo ratings yet
- Use of VE Dampers in Reducing Wind and Earthquake Induced Motion of Buildings-ESDocument16 pagesUse of VE Dampers in Reducing Wind and Earthquake Induced Motion of Buildings-ESkostas formulagrNo ratings yet
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- Bequette - Control de ProcesosDocument94 pagesBequette - Control de ProcesosKevin Torres ValenciaNo ratings yet
- ME 408 Automatic Control - MidSp2021 PDFDocument2 pagesME 408 Automatic Control - MidSp2021 PDFShujah RashidNo ratings yet
- Dissipative ForcesDocument9 pagesDissipative ForcesumerilyasNo ratings yet
- Updated Lab Manual - FDocument2 pagesUpdated Lab Manual - FDaniel KalderNo ratings yet
- Lab Report 1Document28 pagesLab Report 1PAULUS MAONGONo ratings yet
- Forced Harmonic OscDocument6 pagesForced Harmonic OscHZ. TYMOFEINo ratings yet
- ExcerptDocument10 pagesExcerptAndrew PhoenixNo ratings yet
- Mechanical Vibrations: Theory and ApplicationsDocument201 pagesMechanical Vibrations: Theory and ApplicationsKritimook RomsaengNo ratings yet
- Servomechanism Fundamentals - Zeines, Ben, 1917 - 1959 - New York, McGraw-Hill - Anna's ArchiveDocument284 pagesServomechanism Fundamentals - Zeines, Ben, 1917 - 1959 - New York, McGraw-Hill - Anna's Archivehefova3176No ratings yet
- Spence and Kareem - Tall Buildings and Damping - A Concept-Based Date-Driven Model - 2014Document15 pagesSpence and Kareem - Tall Buildings and Damping - A Concept-Based Date-Driven Model - 2014MILL3482No ratings yet
- A Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsDocument30 pagesA Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsPengjing WangNo ratings yet
- Overcoming Soil Uncertainty in Prediction of Construction and Industrial VibrationsDocument20 pagesOvercoming Soil Uncertainty in Prediction of Construction and Industrial VibrationslrbolNo ratings yet
- Lecture 2: Free Vibrations and Impulse Loads: February 1Document12 pagesLecture 2: Free Vibrations and Impulse Loads: February 1সৌরভ এসভিNo ratings yet
- Structural Dynamics With Applications in Earthquake and Wind Engineering by Konstantin Meskouris, Christoph Butenweg, Klaus-G. Hinzen, Rüdiger HöfferDocument561 pagesStructural Dynamics With Applications in Earthquake and Wind Engineering by Konstantin Meskouris, Christoph Butenweg, Klaus-G. Hinzen, Rüdiger HöfferJohan ItoNo ratings yet
- Midterm Quiz 2 100%Document9 pagesMidterm Quiz 2 100%John CodesNo ratings yet
- Simple Harmonic Motion (Not Yet Completed)Document218 pagesSimple Harmonic Motion (Not Yet Completed)Niketan BhattNo ratings yet
- Anti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessDocument20 pagesAnti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessAbdullah ÇakanNo ratings yet