Download as pdf or txt
You might also like
- Robert L. Norton Design of Machinery SOLUTIONS MANUAL PDFDocument5 pagesRobert L. Norton Design of Machinery SOLUTIONS MANUAL PDFAb25% (4)
- End-Of-Chapter ProblemsDocument7 pagesEnd-Of-Chapter ProblemsSheila CortezNo ratings yet
- Statement:: PROBLEM 2-14Document1 pageStatement:: PROBLEM 2-14GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-34Document1 pageStatement:: PROBLEM 2-34GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-24Document1 pageStatement: Solution:: PROBLEM 2-24GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-27Document1 pageStatement:: PROBLEM 2-27GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document4 pagesStatement: Solution:: Problem 2-8Dio ChanNo ratings yet
- Statement:: L J J M J MDocument1 pageStatement:: L J J M J MGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-29Document1 pageStatement:: PROBLEM 2-29GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-35Document1 pageStatement:: PROBLEM 2-35GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Homework 1 SolutionDocument5 pagesHomework 1 SolutionMrinmoy SahaNo ratings yet
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document1 pageStatement: Solution:: Problem 2-8GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1Gustavo CopplaNo ratings yet
- Statement:: Problem 2-1Document2 pagesStatement:: Problem 2-1GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Solution manual for Design of Machinery: An Introduction to the Synthesis and Analysis of Mechanisms and Machines Norton 5th Edition download pdf full chapterDocument27 pagesSolution manual for Design of Machinery: An Introduction to the Synthesis and Analysis of Mechanisms and Machines Norton 5th Edition download pdf full chaptermanukasukk100% (3)
- Statement:: PROBLEM 2-36Document1 pageStatement:: PROBLEM 2-36GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-23Document1 pageStatement: Solution:: PROBLEM 2-23GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Solutions Manual To Accompany Machine Design 5th Edition 013335671xDocument2 pagesSolutions Manual To Accompany Machine Design 5th Edition 013335671xantonybestin94No ratings yet
- Finite Element Method: Beam AnalysisDocument10 pagesFinite Element Method: Beam AnalysisZaffira RahmanNo ratings yet
- CE5610: Finite Element Analysis January - May 2014: Duration: 180 Minutes Max. Marks: 50Document3 pagesCE5610: Finite Element Analysis January - May 2014: Duration: 180 Minutes Max. Marks: 50sreenathNo ratings yet
- ADC0809 With CKT, Flow CodeDocument8 pagesADC0809 With CKT, Flow CodeBhaskar Rao PNo ratings yet
- Statement:: PROBLEM 2-27Document1 pageStatement:: PROBLEM 2-27Mulham Inspired HarrasiNo ratings yet
- Statement:: PROBLEM 2-43Document1 pageStatement:: PROBLEM 2-43GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Chapter 5 Three-Phase Transformer v2Document9 pagesChapter 5 Three-Phase Transformer v2kevinkiangebeiNo ratings yet
- Q.1 The Following Table Summarizes The Duration of Eight Activities and Their Resource RequirementsDocument5 pagesQ.1 The Following Table Summarizes The Duration of Eight Activities and Their Resource RequirementsIbraheem DwikatNo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- IAT-1Document3 pagesIAT-1Cody LeeNo ratings yet
- 4 - Plan Du Chargeur BeSAFE StandardDocument11 pages4 - Plan Du Chargeur BeSAFE StandardISSAMNo ratings yet
- Chapter 6 - 12 QuestionsDocument4 pagesChapter 6 - 12 Questionsmaqyla naquelNo ratings yet
- Chapter 5: Scheduling of Repetitive ProjectsDocument18 pagesChapter 5: Scheduling of Repetitive ProjectsEngineermsabryNo ratings yet
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionKash TorabiNo ratings yet
- Chapter 5 Three-Phase Transformer v2Document9 pagesChapter 5 Three-Phase Transformer v2AnassNo ratings yet
- Lecture 3 Elements BC Loading Materials UpdatedDocument107 pagesLecture 3 Elements BC Loading Materials UpdatedHaytham AlmaghariNo ratings yet
- Network AnalysisDocument5 pagesNetwork AnalysisRudraksh MandhareNo ratings yet
- ENGI6705 StructuralAnalysis ClassNotes2Document14 pagesENGI6705 StructuralAnalysis ClassNotes2TanitriNo ratings yet
- Arc 160 S Inverter Welder sg3525 Ca3140 SCHDocument6 pagesArc 160 S Inverter Welder sg3525 Ca3140 SCHImre Kathi100% (2)
- Statement:: PROBLEM 2-32Document1 pageStatement:: PROBLEM 2-32GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- 1157full Download PDF of Solutions Manual To Accompany Machine Design 5th Edition 013335671X All ChapterDocument26 pages1157full Download PDF of Solutions Manual To Accompany Machine Design 5th Edition 013335671X All Chapteralnonopiola100% (4)
- Mechanism Synthesis, GraphicalDocument17 pagesMechanism Synthesis, GraphicalPriyadarshini KrishnaswamyNo ratings yet
- A High-Power DC-DC Converter Topology For Battery Charging ApplicationsDocument18 pagesA High-Power DC-DC Converter Topology For Battery Charging ApplicationsL CHNo ratings yet
- Microcontroller Based PWM Inverter For Speed Control of A Three Phase Induction MotorDocument7 pagesMicrocontroller Based PWM Inverter For Speed Control of A Three Phase Induction MotorAhmar Hayat KhanNo ratings yet
- Column 7Document1 pageColumn 7Nimeshkumar PatelNo ratings yet
- Truss Analysis: A Structural Mechanics Tour of The FEM-Nodal Equilibrium and CompatibilityDocument22 pagesTruss Analysis: A Structural Mechanics Tour of The FEM-Nodal Equilibrium and CompatibilitypatrickNX9420No ratings yet
- Practical Business Math Procedures 12th Edition Slater Solutions ManualDocument21 pagesPractical Business Math Procedures 12th Edition Slater Solutions ManualMichaelWrighttcfb100% (47)
- Dwnload Full Practical Business Math Procedures 12th Edition Slater Solutions Manual PDFDocument35 pagesDwnload Full Practical Business Math Procedures 12th Edition Slater Solutions Manual PDFkerbeylopuhh100% (13)
- Practical Business Math Procedures 12th Edition Slater Solutions ManualDocument35 pagesPractical Business Math Procedures 12th Edition Slater Solutions Manualshannonrussellara7q100% (27)
- Nice Dpro500Document104 pagesNice Dpro500Juan Carlos Revuelta NNo ratings yet
- CO702.1 CO702.2 CO702.3 CO702.4 CO702.5 CO702.6: Co For HVDC Transmission of Sem Vii CO StatementDocument7 pagesCO702.1 CO702.2 CO702.3 CO702.4 CO702.5 CO702.6: Co For HVDC Transmission of Sem Vii CO StatementsangeetadineshNo ratings yet
- Pipelines and Pipe Networks: Civil Engineering DepartmentDocument96 pagesPipelines and Pipe Networks: Civil Engineering DepartmentNtakirutimana ManasséNo ratings yet
- Generating Network DiagrammsDocument6 pagesGenerating Network DiagrammsSammy-papa Maropeng ShikaNo ratings yet
- 1 Connector Description: 4-Channel MultiplexerDocument2 pages1 Connector Description: 4-Channel MultiplexerK. RAJA SEKARNo ratings yet
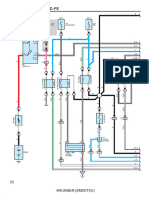
- 4RUNNER 2006 Engine Control For 2UZ-FEDocument14 pages4RUNNER 2006 Engine Control For 2UZ-FEJamsyare MendozaNo ratings yet
- IMPORT DrawingDocument48 pagesIMPORT DrawingVũ Đình HòaNo ratings yet
- BBEE103 Set 1Document2 pagesBBEE103 Set 1Sachin K PNo ratings yet
- Main Group Metal Coordination Polymers: Structures and NanostructuresFrom EverandMain Group Metal Coordination Polymers: Structures and NanostructuresNo ratings yet
- Graphene Oxide: Fundamentals and ApplicationsFrom EverandGraphene Oxide: Fundamentals and ApplicationsAyrat M. DimievNo ratings yet
- Statement:: PROBLEM 2-44Document1 pageStatement:: PROBLEM 2-44GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-43Document1 pageStatement:: PROBLEM 2-43GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Condition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseDocument1 pageCondition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-15Document1 pageStatement:: PROBLEM 2-15GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: L J J M J MDocument1 pageStatement:: L J J M J MGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-36Document1 pageStatement:: PROBLEM 2-36GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-53Document1 pageStatement:: PROBLEM 2-53GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-18Document1 pageStatement:: PROBLEM 2-18GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- 4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementDocument1 page4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-32Document1 pageStatement:: PROBLEM 2-32GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-28Document1 pageStatement: Solution:: PROBLEM 2-28GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-31Document1 pageStatement:: PROBLEM 2-31GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-23Document1 pageStatement: Solution:: PROBLEM 2-23GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-34Document1 pageStatement:: PROBLEM 2-34GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-11Document1 pageStatement:: PROBLEM 2-11GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document1 pageStatement: Solution:: Problem 2-8GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-12Document4 pagesStatement:: PROBLEM 2-12GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-27Document1 pageStatement:: PROBLEM 2-27GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-14Document1 pageStatement:: PROBLEM 2-14GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 1 Have?Document1 pageStatement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 1 Have?GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-35Document1 pageStatement:: PROBLEM 2-35GUSTAVO VINICIUS VIEIRA MELLONo ratings yet