Download as pdf or txt
You might also like
- Real-Time Product Recognition and Currency Detection in Supermarket For Visually ImpairedDocument6 pagesReal-Time Product Recognition and Currency Detection in Supermarket For Visually ImpairedSanket JadhavNo ratings yet
- Tim 2020 3033726Document12 pagesTim 2020 3033726redstitch15No ratings yet
- Face Mask Detection ProjectDocument17 pagesFace Mask Detection Projectvaruag2022No ratings yet
- Image Quality Assessment Based On Perceptual Blur MetricDocument6 pagesImage Quality Assessment Based On Perceptual Blur MetricWARSE JournalsNo ratings yet
- Electronics 10 02256Document20 pagesElectronics 10 02256Coordinator Exams PUGKCNo ratings yet
- Unsupervised Densely Attention Network For Infrared and Visible Image FusionDocument12 pagesUnsupervised Densely Attention Network For Infrared and Visible Image Fusionsamaneh keshavarziNo ratings yet
- Algorithms 14 00257 v2Document14 pagesAlgorithms 14 00257 v2Selcuk SelcukNo ratings yet
- FCV Notes Module-1Document33 pagesFCV Notes Module-1d62achyuthpraoNo ratings yet
- Extra Paper - Using of DINO Instead of CLIPDocument13 pagesExtra Paper - Using of DINO Instead of CLIPb22080No ratings yet
- Impact of Image Resizing On Deep Learning Detectors For Training Time and Model PerformanceDocument8 pagesImpact of Image Resizing On Deep Learning Detectors For Training Time and Model Performancebryansantoso8585No ratings yet
- Efficient Technique On Face Recognition Using CNNDocument7 pagesEfficient Technique On Face Recognition Using CNNIJRASETPublicationsNo ratings yet
- Zhou 2015Document8 pagesZhou 2015Long Đào HảiNo ratings yet
- Applied Sciences: A Review of Video Object Detection: Datasets, Metrics and MethodsDocument24 pagesApplied Sciences: A Review of Video Object Detection: Datasets, Metrics and MethodsYishpan KarkushtaNo ratings yet
- An Effective Approach For Detection and Segmentation of Protein Spots On 2-D Gel ImagesDocument10 pagesAn Effective Approach For Detection and Segmentation of Protein Spots On 2-D Gel ImagesRajath SoansNo ratings yet
- Zaryab PaperDocument10 pagesZaryab Paperkhan zNo ratings yet
- Yolo Fruit RipenessDocument18 pagesYolo Fruit RipenessAyush MishraNo ratings yet
- Detect Digital Image Splicing With Visual Cues: June 2009Document16 pagesDetect Digital Image Splicing With Visual Cues: June 2009Srilakshmi VNo ratings yet
- 2 PDFDocument13 pages2 PDFHouda TàNo ratings yet
- JDANDocument17 pagesJDANfqsgrnzwkhNo ratings yet
- 10 - 22-A Thorough Review of Models, Evaluation Metrics, and Datasets On Image CaptioningDocument23 pages10 - 22-A Thorough Review of Models, Evaluation Metrics, and Datasets On Image CaptioningPhạm Thanh TrườngNo ratings yet
- Conv-MCD: A Plug-and-Play Multi-Task Module For Medical Image SegmentationDocument8 pagesConv-MCD: A Plug-and-Play Multi-Task Module For Medical Image SegmentationGaston GBNo ratings yet
- 28-04-2021-1619594381-6 - Ijcse-6. Ijcse - Defect Classification in Surface Structure of Steels Using Deep LearningDocument10 pages28-04-2021-1619594381-6 - Ijcse-6. Ijcse - Defect Classification in Surface Structure of Steels Using Deep Learningiaset123No ratings yet
- SPIN-2021 Paper 610Document8 pagesSPIN-2021 Paper 610cherrygoudgudavalliNo ratings yet
- Face Photo Sketch Recognition Using DeepDocument6 pagesFace Photo Sketch Recognition Using DeepDr. Md. Salah Uddin YusufNo ratings yet
- Ajol-File-Journals 543 Articles 255840 650d5184b77f4Document14 pagesAjol-File-Journals 543 Articles 255840 650d5184b77f4badasahirpesaj0906No ratings yet
- "Detection and Classification of Consumed Food Items" Using Deep Learning AlgorithmDocument19 pages"Detection and Classification of Consumed Food Items" Using Deep Learning Algorithmjeffery lawrenceNo ratings yet
- Loan Prediction Using Artificial Intelligence and Machine LearningDocument23 pagesLoan Prediction Using Artificial Intelligence and Machine LearningSumitNo ratings yet
- CSVT Forgerydetection Manuscript SubmittedDocument31 pagesCSVT Forgerydetection Manuscript SubmittedhaiderasadiNo ratings yet
- Medical Image SegmentationDocument13 pagesMedical Image SegmentationMd. Ayash IslamNo ratings yet
- BIOMETRICSDocument18 pagesBIOMETRICSPRANAY KAISTHANo ratings yet
- Data Level Fusion For Multi Biometric System Using Face and FingerDocument5 pagesData Level Fusion For Multi Biometric System Using Face and FingerIjarcsee JournalNo ratings yet
- Mahor ProjectDocument25 pagesMahor ProjectHaji MohammedNo ratings yet
- A Study of Garbage Classification With CNNDocument6 pagesA Study of Garbage Classification With CNNRezwan AhmedNo ratings yet
- Object Detection and Identification A Project Report: November 2019Document45 pagesObject Detection and Identification A Project Report: November 2019Shivank BansalNo ratings yet
- Text To Image Synthesis Using SelfDocument20 pagesText To Image Synthesis Using SelfPG GuidesNo ratings yet
- 1 s2.0 S0031320323000481 MainDocument12 pages1 s2.0 S0031320323000481 Mainmahmoud AbuzaydaNo ratings yet
- Development of An Image Matching System Using OpencvDocument20 pagesDevelopment of An Image Matching System Using OpencvOkunade OluwafemiNo ratings yet
- A Novel Deep Learning Framework For Copy-Move Forgery Detection in ImagesDocument27 pagesA Novel Deep Learning Framework For Copy-Move Forgery Detection in ImagesWISSALNo ratings yet
- DG-GAN A High Quality Defect Image Generation MethDocument19 pagesDG-GAN A High Quality Defect Image Generation MethSrikarrao NaropanthNo ratings yet
- Age Gender Detection PresentationDocument15 pagesAge Gender Detection Presentationyogashyogi143No ratings yet
- Facial Landmark Detection With Sentiment RecognitionDocument7 pagesFacial Landmark Detection With Sentiment RecognitionIJRASETPublicationsNo ratings yet
- Fin Irjmets1654850281Document10 pagesFin Irjmets1654850281Ferdawes AbdessalemNo ratings yet
- FaceMaskdetection Mini Project ReportDocument20 pagesFaceMaskdetection Mini Project ReportShayak RayNo ratings yet
- Journal of Advanced Research: Andrei-Alexandru Tulbure, Adrian-Alexandru Tulbure, Eva-Henrietta DulfDocument16 pagesJournal of Advanced Research: Andrei-Alexandru Tulbure, Adrian-Alexandru Tulbure, Eva-Henrietta DulfBudrescu GeorgeNo ratings yet
- Social Distancing Detection Using TensorflowDocument4 pagesSocial Distancing Detection Using TensorflowIRJMETS JOURNALNo ratings yet
- AI Project FYP ProposalDocument11 pagesAI Project FYP ProposalMohammad Faraz FarooqiNo ratings yet
- A Hybrid Deep Learning Model For Consumer Credit Scoring: Bing Zhu, Wenchuan Yang, Huaxuan Wang, Yuan YuanDocument4 pagesA Hybrid Deep Learning Model For Consumer Credit Scoring: Bing Zhu, Wenchuan Yang, Huaxuan Wang, Yuan YuanPravinNo ratings yet
- K-Means and Image Processing Use in Histopathological Image AnalysisDocument6 pagesK-Means and Image Processing Use in Histopathological Image AnalysisFaiez Musa Lahmood AlrufayeNo ratings yet
- Multi TargetFacial Recognition System Us PDFDocument7 pagesMulti TargetFacial Recognition System Us PDFchanfa3851No ratings yet
- Loan Prediction Using Artificial Intelligence and Machine LearningDocument24 pagesLoan Prediction Using Artificial Intelligence and Machine LearningSumitNo ratings yet
- Jia Bin Huang Research StatementDocument6 pagesJia Bin Huang Research StatementdewufhweuihNo ratings yet
- Second Progress Report UID - 17BCS2127Document13 pagesSecond Progress Report UID - 17BCS2127Shanu Naval SinghNo ratings yet
- A Comprehensive Review On Various Image Dehazing Techniques: December 2022Document12 pagesA Comprehensive Review On Various Image Dehazing Techniques: December 2022abhilashNo ratings yet
- Fruit MLDocument12 pagesFruit MLmohammad ashfaaqNo ratings yet
- Detection and Content Retrieval of Object in An Image Using YOLODocument8 pagesDetection and Content Retrieval of Object in An Image Using YOLOmamta kweeraNo ratings yet
- One-Dimensional Microaneurysm Feature Sequence Segmentation in Fundus ImagesDocument19 pagesOne-Dimensional Microaneurysm Feature Sequence Segmentation in Fundus Imagesyt HehkkeNo ratings yet
- Irjet V5i12304 PDFDocument7 pagesIrjet V5i12304 PDFAnonymous NBK4baNo ratings yet
- Sensors 22 00896 v3Document17 pagesSensors 22 00896 v3Blaire LimNo ratings yet
- Date Fruit Classification ProjectDocument11 pagesDate Fruit Classification ProjectMohammad Faraz FarooqiNo ratings yet
- Final Review Capstone Research 2021Document21 pagesFinal Review Capstone Research 2021Ar Arunima RaneNo ratings yet
- Grammar Practice Goes FirstDocument16 pagesGrammar Practice Goes FirstAray KuntubaiNo ratings yet
- Faye Glenn Abdellah Ppt. PresentationDocument14 pagesFaye Glenn Abdellah Ppt. PresentationRhyne AsuncionNo ratings yet
- List of Faculty of Ism Dhanbad: Amitesh KumarDocument23 pagesList of Faculty of Ism Dhanbad: Amitesh KumarlundNo ratings yet
- Action ResearchDocument33 pagesAction Researchjazh ladjahaliNo ratings yet
- Written Assignment 1 UNIV1001Document3 pagesWritten Assignment 1 UNIV1001Kevin OoNo ratings yet
- Lesson 1 GE 4 Purposive CommunicationDocument7 pagesLesson 1 GE 4 Purposive CommunicationCath Ley YahNo ratings yet
- Research Proposal Group 6 Done 2 CopiesDocument4 pagesResearch Proposal Group 6 Done 2 Copiesjudilyn lumabangNo ratings yet
- Test Questions - Speech Writing ProcessDocument2 pagesTest Questions - Speech Writing ProcessrosettemujeNo ratings yet
- Bertrand Russell'S Neutral MonismDocument357 pagesBertrand Russell'S Neutral MonismSajal MondalNo ratings yet
- Solving A Traveling Salesman Problem Using Meta-HeuristicsDocument9 pagesSolving A Traveling Salesman Problem Using Meta-HeuristicsIAES IJAINo ratings yet
- Employee Engagement and Organizational SurvivalDocument15 pagesEmployee Engagement and Organizational SurvivalHello HeulNo ratings yet
- SssssDocument19 pagesSssssRyan's Digital Printing ServicesNo ratings yet
- Biostat Chepter OneDocument211 pagesBiostat Chepter Oneelona jcimlNo ratings yet
- Nhs FPX 4000 Assessment 4 Analyzing A Current Health Care Problem or IssueDocument5 pagesNhs FPX 4000 Assessment 4 Analyzing A Current Health Care Problem or IssueEmma WatsonNo ratings yet
- Psed5112 MoDocument25 pagesPsed5112 MoclarisemoodNo ratings yet
- 77-Article Text-255-1-10-20210918Document3 pages77-Article Text-255-1-10-20210918Rinesa RamaNo ratings yet
- IHART Winter 2010 PDFDocument563 pagesIHART Winter 2010 PDFdari padaNo ratings yet
- Module 1 1Document28 pagesModule 1 1Jessamae GatchallanNo ratings yet
- Chapter I.1 1Document7 pagesChapter I.1 1Raende Tejano SapitananNo ratings yet
- 3 - End of The Semester ReportDocument2 pages3 - End of The Semester Reportapi-644953497No ratings yet
- Dignity of Labour (HPE Project)Document10 pagesDignity of Labour (HPE Project)prishasharma4327100% (1)
- Disciplines and Ideas in Social Sciences: Dissq1W6Document10 pagesDisciplines and Ideas in Social Sciences: Dissq1W6FrennyNo ratings yet
- You Can Contact Me Using: Gemechu Nemera, PHD Mobile: 0911877124 E-MailDocument84 pagesYou Can Contact Me Using: Gemechu Nemera, PHD Mobile: 0911877124 E-Mailobsinan dejeneNo ratings yet
- Journal FormatDocument4 pagesJournal FormatNorash PatsNo ratings yet
- DLP-L01.2 - Introduction To Personal DevelopmentDocument2 pagesDLP-L01.2 - Introduction To Personal DevelopmentDenise Nicole T. LopezNo ratings yet
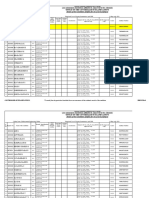
- CSE - 2019-23 BATCH - List of Successful CandidatesDocument16 pagesCSE - 2019-23 BATCH - List of Successful CandidatesKavishree RNo ratings yet
- LiteracyDocument35 pagesLiteracyRex Bautista100% (1)
- Done Inosr Am 31 1 5 2017.Document5 pagesDone Inosr Am 31 1 5 2017.Ujjwal SharmaNo ratings yet
- TheProfessionalNurseSelf AssessmentScaleDocument14 pagesTheProfessionalNurseSelf AssessmentScaleNabeeha Fazeel100% (1)