Download as pdf or txt
You might also like
- Internal Combustion Engines - MidtermsDocument29 pagesInternal Combustion Engines - Midtermsfoj90532No ratings yet
- Coursebook Answers: Exam-Style QuestionsDocument2 pagesCoursebook Answers: Exam-Style Questionstashi92% (13)
- Uniform Accelerated Motion - LessonDocument24 pagesUniform Accelerated Motion - LessonJennifer Magango100% (3)
- Cheng T.P., Li L.F. Gauge Theory of Elementary Particle Physics (Oxford, 2000) (100dpi) (T) (315s) (KA) - PQGFDocument315 pagesCheng T.P., Li L.F. Gauge Theory of Elementary Particle Physics (Oxford, 2000) (100dpi) (T) (315s) (KA) - PQGFGeorge Padurariu71% (7)
- Lecture 39-41 Oscillators - SDACDocument15 pagesLecture 39-41 Oscillators - SDACRahul Kumar sahaniNo ratings yet
- Ciclos CombinadosDocument2 pagesCiclos CombinadosDiego AllendesNo ratings yet
- MDR PDFDocument34 pagesMDR PDFJohnNo ratings yet
- Steady State Flow Tutorial - PDFDocument4 pagesSteady State Flow Tutorial - PDFOmer IkhlasNo ratings yet
- 10 - Acceleration and Vibration Measurement - SensorsDocument28 pages10 - Acceleration and Vibration Measurement - SensorsKARTHIK S SNo ratings yet
- Chen 3009 - Tutorial 1-2021Document31 pagesChen 3009 - Tutorial 1-2021Rosario QFNo ratings yet
- 01 - Centrifugal Compressor 1Document24 pages01 - Centrifugal Compressor 1محمد حسنNo ratings yet
- Fundamentals of Fluid Flow and MeasurementsDocument13 pagesFundamentals of Fluid Flow and MeasurementsdbircsNo ratings yet
- Etude de ContreventementDocument3 pagesEtude de ContreventementFati MaNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- CH4404 Lecture 04 ModellingProcessDynamics 3Document15 pagesCH4404 Lecture 04 ModellingProcessDynamics 3RRNo ratings yet
- Lahams 2Document10 pagesLahams 2Anthony MacalindongNo ratings yet
- Instruments and Measurements Formula SheetDocument2 pagesInstruments and Measurements Formula SheetSoha Ayaz MehmoodNo ratings yet
- Cheat - Sheet - Exam 1Document2 pagesCheat - Sheet - Exam 1LoganNo ratings yet
- PCS 125 Formulas Chapter 15-17Document9 pagesPCS 125 Formulas Chapter 15-17thetannies0613No ratings yet
- HT Equation SheetDocument8 pagesHT Equation SheetJohn GassonNo ratings yet
- Linear Stability Theory SoDocument19 pagesLinear Stability Theory Soabdul majeedNo ratings yet
- To Plot The Step Response of A Fist Order RL CircuitDocument2 pagesTo Plot The Step Response of A Fist Order RL CircuitdaudNo ratings yet
- Lec3 NotesDocument14 pagesLec3 Notesameya1981No ratings yet
- Formulario Parcial 2Document1 pageFormulario Parcial 2Viviana RamírezNo ratings yet
- Equations Sheet - v2Document9 pagesEquations Sheet - v2angelamnsr100% (1)
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- Non-Isothermal Reactors: Homework: Problem 8-6Document16 pagesNon-Isothermal Reactors: Homework: Problem 8-6Matthew Van BeekNo ratings yet
- CFPA Cheat SheeteDocument2 pagesCFPA Cheat Sheetem.1990.williamsNo ratings yet
- MEC 309 Chapter 6 FormulasDocument2 pagesMEC 309 Chapter 6 Formulasthetannies0613No ratings yet
- All Pass Filter - Analog Lab ReportDocument14 pagesAll Pass Filter - Analog Lab Reportgautamsivakumar100No ratings yet
- Class30.03.27.2024 WNDocument17 pagesClass30.03.27.2024 WNEslam UsamaNo ratings yet
- Formulas AerorreactorDocument18 pagesFormulas AerorreactorJaf JimenezNo ratings yet
- 1 L2 Basic Interference (Step by Step) v.2Document7 pages1 L2 Basic Interference (Step by Step) v.2Vincent TionoNo ratings yet
- Air Standard CyclesDocument15 pagesAir Standard CyclesShrey100% (1)
- EquationsDocument2 pagesEquationsRahul ShindeNo ratings yet
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula Sheetjanaka100% (1)
- Diesel CycleDocument1 pageDiesel CycleGladys Ruth PaypaNo ratings yet
- Ch 6 - waves (PHY 001) Solution of Probems.pdf · إصدار ١Document5 pagesCh 6 - waves (PHY 001) Solution of Probems.pdf · إصدار ١make handNo ratings yet
- Insem 1 - PE - Handbook - 2023Document3 pagesInsem 1 - PE - Handbook - 2023Ananya VNo ratings yet
- Hagen Poisuille EquationDocument4 pagesHagen Poisuille EquationRochakNo ratings yet
- Airplane PerformanceDocument22 pagesAirplane PerformanceRioNo ratings yet
- Formulario Hidalgo Édison 3ADocument2 pagesFormulario Hidalgo Édison 3AEdison Enrique Hidalgo SilvaNo ratings yet
- Naval Architecture Equation Summary SheetDocument11 pagesNaval Architecture Equation Summary SheetAnonymous JSHUTpNo ratings yet
- Geochemistry FormulaeDocument4 pagesGeochemistry FormulaePrayas DuttaNo ratings yet
- ElectronicII Lecture7 Filters ExercicesDocument23 pagesElectronicII Lecture7 Filters ExercicesSlime UNICORNNo ratings yet
- محمد حسن محمد عبدالحميدDocument3 pagesمحمد حسن محمد عبدالحميدMohammed Hassan RashadNo ratings yet
- Governors TheoryDocument37 pagesGovernors Theorymane prathameshNo ratings yet
- Lec 02-5 - Neutral PointDocument21 pagesLec 02-5 - Neutral PointArslan MehmoodNo ratings yet
- Corriente Eficaz en El Condensador 2: 20Khz A 50KhzDocument1 pageCorriente Eficaz en El Condensador 2: 20Khz A 50KhzdojiligNo ratings yet
- Els TDocument1 pageEls TABAHMANE MohemmedNo ratings yet
- Design & Control of Excitation System For Sync Generator: Mid Project PresentationDocument33 pagesDesign & Control of Excitation System For Sync Generator: Mid Project PresentationMuhammad Raheel TariqNo ratings yet
- Name: Aditya A P Roll Number: M180056ME Guide: Dr. Ghulam Jilani, Dr. Simon PeterDocument5 pagesName: Aditya A P Roll Number: M180056ME Guide: Dr. Ghulam Jilani, Dr. Simon PeterAjaratanNo ratings yet
- Lecture 5Document37 pagesLecture 5Assma MohamedNo ratings yet
- Indian Institute of Technology, Kharagpur: Ocean Engineering and Naval ArchitectureDocument10 pagesIndian Institute of Technology, Kharagpur: Ocean Engineering and Naval ArchitectureSuraj GaikwadNo ratings yet
- Steps in Strap FootingDocument1 pageSteps in Strap FootingDae NyghtNo ratings yet
- Steady State Plug Flow Reactor: Hernandez PineDocument17 pagesSteady State Plug Flow Reactor: Hernandez PineJez Jaycris HernandezNo ratings yet
- Formulario de QuimicaDocument3 pagesFormulario de QuimicaREOMNo ratings yet
- By Engineerprof Ph/Engr. Raymart BoneteDocument1 pageBy Engineerprof Ph/Engr. Raymart BoneteNurlaila DalidigNo ratings yet
- Hydraulics Reviewer For Civil Engineering StudentsDocument2 pagesHydraulics Reviewer For Civil Engineering StudentsKing BangngayNo ratings yet
- Energy and Reaction ForcesDocument9 pagesEnergy and Reaction ForcesPhilani XabaNo ratings yet
- Final SheetsDocument2 pagesFinal Sheetsعلي سعيد سعودNo ratings yet
- Reciprocating Compressor - Useful Equations: For Double Acting Air Compressors Multiply The Work Input by 2Document4 pagesReciprocating Compressor - Useful Equations: For Double Acting Air Compressors Multiply The Work Input by 2Jinehya SorongonNo ratings yet
- Class FiveDocument1 pageClass FiveMB SIXTEENNo ratings yet
- Lab Manual of Farm Power & Engine System (Agri-Ii/I and Internal Combustion Engines (Mech-Iii/Ii)Document350 pagesLab Manual of Farm Power & Engine System (Agri-Ii/I and Internal Combustion Engines (Mech-Iii/Ii)MB SIXTEENNo ratings yet
- Routene 2079 ChaitDocument2 pagesRoutene 2079 ChaitMB SIXTEENNo ratings yet
- UntitledDocument1 pageUntitledMB SIXTEENNo ratings yet
- Problems: Flexible Mechanical Elements 917Document7 pagesProblems: Flexible Mechanical Elements 917MB SIXTEENNo ratings yet
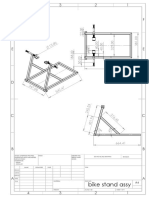
- Bike Stand AssyDocument1 pageBike Stand AssyMB SIXTEENNo ratings yet
- Grants Portal Orientation - FluxxDocument26 pagesGrants Portal Orientation - FluxxMB SIXTEENNo ratings yet
- Conduction Heat TransferDocument97 pagesConduction Heat TransferMB SIXTEENNo ratings yet
- Design of Production System: Factory Building and Plant LayoutDocument36 pagesDesign of Production System: Factory Building and Plant LayoutMB SIXTEENNo ratings yet
- UntitledDocument2 pagesUntitledMB SIXTEENNo ratings yet
- IC Chapter 1Document63 pagesIC Chapter 1MB SIXTEENNo ratings yet
- Purwanchal Campus 2Document1 pagePurwanchal Campus 2MB SIXTEENNo ratings yet
- Defense in Depth On 11th Gen Intel Core Processors - 052721 - FinalDocument10 pagesDefense in Depth On 11th Gen Intel Core Processors - 052721 - FinalMB SIXTEENNo ratings yet
- Suyesh Bhattari and Kapil Khanal AutocadDocument94 pagesSuyesh Bhattari and Kapil Khanal AutocadMB SIXTEENNo ratings yet
- Chapter 3 Mechanical Properties and Their Tests 3.2, 3.3, 3.4, & 3.5Document25 pagesChapter 3 Mechanical Properties and Their Tests 3.2, 3.3, 3.4, & 3.5MB SIXTEENNo ratings yet
- Portable Oxygen Concentrator Based On: Vacuum Pressure Swing Adsorption (VPSA)Document18 pagesPortable Oxygen Concentrator Based On: Vacuum Pressure Swing Adsorption (VPSA)MB SIXTEENNo ratings yet
- Part 3Document48 pagesPart 3MB SIXTEENNo ratings yet
- Part 2Document54 pagesPart 2MB SIXTEENNo ratings yet
- 45.4540396notice Routine of Previous CovidPositive StudentsDocument2 pages45.4540396notice Routine of Previous CovidPositive StudentsMB SIXTEENNo ratings yet
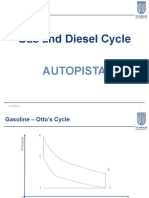
- 02 Gasoline and Diesel CycleDocument10 pages02 Gasoline and Diesel CycleMB SIXTEENNo ratings yet
- EC Drive - EC PlusDocument21 pagesEC Drive - EC PlusMohammed FarhanNo ratings yet
- Bearing Capacity Using Hoek-Brown Criterion by Merifield Et AlDocument18 pagesBearing Capacity Using Hoek-Brown Criterion by Merifield Et Alnguyenvanhoa95.humgNo ratings yet
- Capitulo 4Document0 pagesCapitulo 4saded05No ratings yet
- 2005 Bookmatter SurfaceWavesInGeomechanicsDire PDFDocument8 pages2005 Bookmatter SurfaceWavesInGeomechanicsDire PDFJulioPNo ratings yet
- Viga IN SoldadoDocument14 pagesViga IN SoldadoDiego Rosales GarinNo ratings yet
- Formulas FinalDocument2 pagesFormulas FinalTam AdıNo ratings yet
- Computational AssignmentDocument16 pagesComputational AssignmentAshebirNo ratings yet
- Oscillations TheoryDocument10 pagesOscillations TheoryJoanna PanayiNo ratings yet
- 01 06 2021++Kinematics+Introduction+Vinay+Sir+Physics+11th+Elite+Live+VJEEDocument131 pages01 06 2021++Kinematics+Introduction+Vinay+Sir+Physics+11th+Elite+Live+VJEEsanju kumariNo ratings yet
- Seismic Design of Steel Structures PDFDocument54 pagesSeismic Design of Steel Structures PDFSumanth100% (1)
- Slide CIV308 CIV308 Slide 02Document23 pagesSlide CIV308 CIV308 Slide 02Steffy CatharinaNo ratings yet
- Mathcad - Pipe Gusset PlateDocument4 pagesMathcad - Pipe Gusset PlatePradeep ChitluriNo ratings yet
- Final Quiz 2 - CIV191.PDF Version 1Document1 pageFinal Quiz 2 - CIV191.PDF Version 1Harvey MorosNo ratings yet
- ASTM D2105 Longitudinal Tensile FiberglassDocument6 pagesASTM D2105 Longitudinal Tensile FiberglassAngyMartinezNo ratings yet
- 0305 Olevsky - Theory of SinteringDocument64 pages0305 Olevsky - Theory of SinteringKhadijah FaridNo ratings yet
- 2D Motion Lab-1Document2 pages2D Motion Lab-1Muzamil Shah100% (1)
- Consolidation Settlement Examples 2 - Solutions (2) - 2Document11 pagesConsolidation Settlement Examples 2 - Solutions (2) - 2Sujani MaarasingheNo ratings yet
- Chapter 3 TurbomachineDocument60 pagesChapter 3 TurbomachineMohd Soufian100% (1)
- Carnot's Theorem (Thermodynamics) - WikipediaDocument20 pagesCarnot's Theorem (Thermodynamics) - WikipediaEndhy Wisnu NovindraNo ratings yet
- Uniform Flow - PPTDocument14 pagesUniform Flow - PPTMpumelelo JeffNo ratings yet
- HW13 First Order Di Erential EquationsDocument1 pageHW13 First Order Di Erential Equations馮維祥No ratings yet
- 34.1 Sound Cie - Igcse - Physics - Ext Theory QPDocument10 pages34.1 Sound Cie - Igcse - Physics - Ext Theory QPSNIPER GAMINGNo ratings yet
- Moody SiDocument1 pageMoody SiLuz NuñezNo ratings yet
- Dom MCQ Bank 2Document4 pagesDom MCQ Bank 219006 Sahel GamitNo ratings yet
- Assignment Booklet: Electricity and MagnetismDocument4 pagesAssignment Booklet: Electricity and Magnetismparveen TanwarNo ratings yet
- Reynolds Transport TheoremDocument14 pagesReynolds Transport TheoremJayant SisodiaNo ratings yet