Download as docx, pdf, or txt
You might also like
- General Relativity Solutions To Exercises by Sergei WinitzkiDocument39 pagesGeneral Relativity Solutions To Exercises by Sergei WinitzkiMichael Anthony Mendoza83% (6)
- Staad To Mat3dDocument13 pagesStaad To Mat3dphanikrishnabNo ratings yet
- TUTORIAL 1 RoboticDocument13 pagesTUTORIAL 1 Roboticdenesvmb2000No ratings yet
- Time (UTC)Document7 pagesTime (UTC)Daniel TapiaNo ratings yet
- 2A5 Linear Programming - Simplex Method - Maximization CaseDocument16 pages2A5 Linear Programming - Simplex Method - Maximization CaseMikee Trisha Mae PonteNo ratings yet
- المحاضرة السابعةDocument15 pagesالمحاضرة السابعةmahr2004tyNo ratings yet
- Resolver La Armadura Mostrada Ea CteDocument74 pagesResolver La Armadura Mostrada Ea CteJose Luis Delgado SánchezNo ratings yet
- Coco MartinDocument1 pageCoco MartinKobe RequilmanNo ratings yet
- Time (UTC)Document3 pagesTime (UTC)Daniel TapiaNo ratings yet
- LECTURE NOTES For Industrial RoboticDocument8 pagesLECTURE NOTES For Industrial Roboticdenesvmb2000No ratings yet
- Pedestal 1Document3 pagesPedestal 1EakJhuanNo ratings yet
- Sharvari A 015 Assignment 2Document7 pagesSharvari A 015 Assignment 2sharvari kadamNo ratings yet
- Multivariable Control Systems EE640: Assignment-5Document3 pagesMultivariable Control Systems EE640: Assignment-5sandeepNo ratings yet
- Week06 Open Steam HeatingDocument12 pagesWeek06 Open Steam HeatingSSNo ratings yet
- Man. Sci. Simplex MethodDocument7 pagesMan. Sci. Simplex MethodLunoxNo ratings yet
- T P P ' 1 1 ' ' y X y X : Homogeneous Representation of 2D TransformationsDocument3 pagesT P P ' 1 1 ' ' y X y X : Homogeneous Representation of 2D Transformationsvishwajeet patilNo ratings yet
- Assignement IDocument6 pagesAssignement IMikiyas MulugetaNo ratings yet
- Mathcad MeytaDocument9 pagesMathcad MeytameytaNo ratings yet
- Chapter (7) Beams: RevisionDocument12 pagesChapter (7) Beams: Revisionmake handNo ratings yet
- Trial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Document3 pagesTrial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Aek JanNo ratings yet
- Digital Logic Design - RevisionDocument676 pagesDigital Logic Design - RevisionGanesh ThapaNo ratings yet
- Seismic Calculations Based On Uniform Building Code 1997 EditionDocument7 pagesSeismic Calculations Based On Uniform Building Code 1997 EditionkumsbamaNo ratings yet
- Solutions To CN2116-JYL-2020-HW2: V C C C CDocument4 pagesSolutions To CN2116-JYL-2020-HW2: V C C C CSherrilyn MarzukiNo ratings yet
- Matrix Cocepts and OperationsDocument12 pagesMatrix Cocepts and OperationsJob ReadyNo ratings yet
- STI PAC2 Fall 2018 SolvedDocument4 pagesSTI PAC2 Fall 2018 SolvedMarta Bordonaba Del RioNo ratings yet
- Trial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Document3 pagesTrial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Aek JanNo ratings yet
- Trial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Document3 pagesTrial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Aek JanNo ratings yet
- B-Loading Data - (30-11-08)Document140 pagesB-Loading Data - (30-11-08)phuc-tv4No ratings yet
- Testing Spreadsheet Vs LRFD Tables: Truss Tr23 YP 29-Dec Sample ConnectionDocument4 pagesTesting Spreadsheet Vs LRFD Tables: Truss Tr23 YP 29-Dec Sample Connectionvijay10484No ratings yet
- Plots 2015 4 6Document114 pagesPlots 2015 4 6Daniel TapiaNo ratings yet
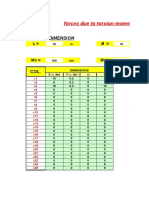
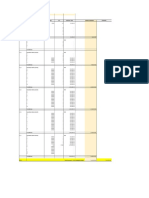
- Forces Due To Torsion Moment Distributions On Walls and ColumnsDocument10 pagesForces Due To Torsion Moment Distributions On Walls and ColumnswalidNo ratings yet
- 15.2 CombinedDocument23 pages15.2 CombinedSomeoneNo ratings yet
- Newton-Raphson For Non-Linear Systems Jacobian Newton - Mathcad Solution To A Non-Linear System of EquationsDocument2 pagesNewton-Raphson For Non-Linear Systems Jacobian Newton - Mathcad Solution To A Non-Linear System of EquationsDheiver SantosNo ratings yet
- Example 1 - FlexibilityDocument7 pagesExample 1 - Flexibilityarokia samyNo ratings yet
- Formato Aplicacion3.0Document18 pagesFormato Aplicacion3.0Nicolas Bohorquez ZamoranoNo ratings yet
- Grafik Ambang LebarDocument4 pagesGrafik Ambang LebarAdelia JbrNo ratings yet
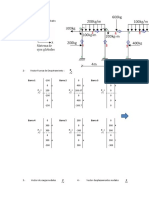
- Analisis MatricialDocument42 pagesAnalisis MatricialAlex RojasNo ratings yet
- MANUAL DE EJERCICIOS ANÁLISIS MATRICIAL Heb MERMA 1Document56 pagesMANUAL DE EJERCICIOS ANÁLISIS MATRICIAL Heb MERMA 1tommy flores choqueNo ratings yet
- Sh2 P Introd To Robot Kinematics 2016Document4 pagesSh2 P Introd To Robot Kinematics 2016mahmoud mohammedNo ratings yet
- 02 Rotation MatricesDocument13 pages02 Rotation MatricessolteanNo ratings yet
- I (Z, T) L R I (Z+ Z, T) : Time - Domain Form of The Transmission Line Equation (Telegrapher Equation)Document37 pagesI (Z, T) L R I (Z+ Z, T) : Time - Domain Form of The Transmission Line Equation (Telegrapher Equation)hdedaniyaNo ratings yet
- Calcul Buloane de Ancoraj: Reactiuni Pe Placa de BazãDocument3 pagesCalcul Buloane de Ancoraj: Reactiuni Pe Placa de BazãAndrei GabaraNo ratings yet
- L?,e, Ijaj No '. 1: Asst NmentDocument9 pagesL?,e, Ijaj No '. 1: Asst NmentPranav BajajNo ratings yet
- DBMS NotesDocument1 pageDBMS NotesAmmar ZaheerNo ratings yet
- Harga Bill EDocument9 pagesHarga Bill EChengal Jaya Sdn. BhdNo ratings yet
- Theoretical Analysis of Intermediate Band Solar Cells (Ibsc) Amir Mehdipour 080T801TDocument34 pagesTheoretical Analysis of Intermediate Band Solar Cells (Ibsc) Amir Mehdipour 080T801TAmir MehdiNo ratings yet
- LCS ProjectDocument15 pagesLCS Projectname choroNo ratings yet
- Bill of Quantities-Concrete - BeamsDocument3 pagesBill of Quantities-Concrete - BeamsMohamed SeoudiNo ratings yet
- Mekanika Rekayasa Iv: Metode Hardy CrossDocument9 pagesMekanika Rekayasa Iv: Metode Hardy CrossTingkos HutabaratNo ratings yet
- Robótica de Manipuladores: ProblemsDocument6 pagesRobótica de Manipuladores: ProblemsAldo ParedesNo ratings yet
- Marginal Costing - Last ClassDocument3 pagesMarginal Costing - Last Classitsbrucewayne2120No ratings yet
- H4 AnswerDocument2 pagesH4 Answeraswin19kNo ratings yet
- RCC53 Column DesignDocument2 pagesRCC53 Column DesignAgung WicaksanaNo ratings yet
- ENGN.2050-202 Assignment 15 Solution PDFDocument7 pagesENGN.2050-202 Assignment 15 Solution PDFVenkat DalaiNo ratings yet
- Formulation Using Virtual Work Principle: U W U WDocument7 pagesFormulation Using Virtual Work Principle: U W U WAniket SuryawanshiNo ratings yet
- Trial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Document3 pagesTrial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Aek JanNo ratings yet
- Trial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Document3 pagesTrial and Error Eccentric Distance Find Balance Section .: Use Re Bar (DB/RB) CB 11.611Aek JanNo ratings yet
- The EllipseDocument9 pagesThe Ellipsesifogax112No ratings yet
- Metodo Joback 2-ETILFENOLDocument5 pagesMetodo Joback 2-ETILFENOLJavier QuirogaNo ratings yet
- SolutionDocument25 pagesSolutionAnirudh AgrawalNo ratings yet
- La PDFDocument208 pagesLa PDFDurga 333No ratings yet
- Differential Geometry - Gabriel Lugo (UNC) PDFDocument61 pagesDifferential Geometry - Gabriel Lugo (UNC) PDFJuanNo ratings yet
- Practical Finite Element Analysis For Mechanical Engineers - Dominique Madier - Ch5Document16 pagesPractical Finite Element Analysis For Mechanical Engineers - Dominique Madier - Ch5Pedro GalvaniNo ratings yet
- Learning Hessian Matrix PDFDocument100 pagesLearning Hessian Matrix PDFSirajus SalekinNo ratings yet
- Don Bosco 12-MATHS-PRE - BOARD-2023-24Document6 pagesDon Bosco 12-MATHS-PRE - BOARD-2023-24nhag720207No ratings yet
- Chapter 2 Linear Equation SystemDocument27 pagesChapter 2 Linear Equation SystemSafwanNawiNo ratings yet
- Multifreedom Constraints I: Introduction To FemDocument16 pagesMultifreedom Constraints I: Introduction To FemMouhaNo ratings yet
- Complex Inner ProductsDocument8 pagesComplex Inner ProductsJuan Carlos Moreno OrtizNo ratings yet
- Note 4 - Numerical Solutions To System of Linear EqnsDocument5 pagesNote 4 - Numerical Solutions To System of Linear EqnsPoorna PrabhashwaraNo ratings yet
- Lecture-1 Slides PDFDocument47 pagesLecture-1 Slides PDFSarit BurmanNo ratings yet
- Worked Example Bayes MinimumDocument3 pagesWorked Example Bayes MinimumNguyễn Hoàng Phương TrầnNo ratings yet
- Math 110 HomeworkDocument4 pagesMath 110 HomeworkcyrixenigmaNo ratings yet
- MAT188H1 - 20219 - 631642212175midterm I-Part B-SolutionDocument3 pagesMAT188H1 - 20219 - 631642212175midterm I-Part B-SolutionYusuf MahdiNo ratings yet
- Vectors and ScalarsDocument26 pagesVectors and ScalarsYob YnnosNo ratings yet
- Maths Matrix Topic 1 AssignmentDocument3 pagesMaths Matrix Topic 1 AssignmentAmit SharmaNo ratings yet
- Numerical Linear AlgebraDocument2 pagesNumerical Linear Algebrathermopolis3012No ratings yet
- A Recursive Algorithm For Finding TheDocument17 pagesA Recursive Algorithm For Finding TheedtrawtmamNo ratings yet
- Physics 411 HW#1 SolutionsDocument10 pagesPhysics 411 HW#1 SolutionsAnonyvousNo ratings yet
- Finite-Length Discrete TransformsDocument44 pagesFinite-Length Discrete TransformsThiruselvan ManianNo ratings yet
- Vectors and Matrices, Problem Set 1Document3 pagesVectors and Matrices, Problem Set 1Roy VeseyNo ratings yet
- St. Paul College Foundation Inc. Bulacao Campus, Cebu City College of Education First Semester, 2018-2019Document9 pagesSt. Paul College Foundation Inc. Bulacao Campus, Cebu City College of Education First Semester, 2018-2019Nel BorniaNo ratings yet
- Subspaces Bases Dimension SolsDocument7 pagesSubspaces Bases Dimension SolsMania MnaNo ratings yet
- MA4254 Discrete OptimizationDocument69 pagesMA4254 Discrete OptimizationmengsiongNo ratings yet
- Pix4D Yaw Pitch Roll Omega To Phi Kappa Angles and ConversionDocument4 pagesPix4D Yaw Pitch Roll Omega To Phi Kappa Angles and ConversionRajnish MalikNo ratings yet
- MatriksDocument7 pagesMatriksParam VaramanNo ratings yet
- Apuntes Tema 01Document17 pagesApuntes Tema 01Airam MorellNo ratings yet
- Quantum-Inspired Classical Algorithms For Recommendation SystemsDocument68 pagesQuantum-Inspired Classical Algorithms For Recommendation SystemsKatherine GilberNo ratings yet
- Reg. No. - Name: - SigDocument2 pagesReg. No. - Name: - SigBahauddin BalochNo ratings yet
- Mex c1 Further Work With Vectors Showcloze 200704Document61 pagesMex c1 Further Work With Vectors Showcloze 200704Reacher Elliot100% (1)