Download as pdf or txt
You might also like
- ME2142-2 Lab MAnual Speed and Position ControlDocument9 pagesME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanNo ratings yet
- Qualitative PI ControlDocument4 pagesQualitative PI ControlAbeer ChaudhryNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna VeniNo ratings yet
- ASTM E207-00 Standard Test Method ForThermal EMF Test of Single Thermoelement Materials by Comparison With A Reference Thermoelement of Similar EMF-Temperature PropertiesDocument7 pagesASTM E207-00 Standard Test Method ForThermal EMF Test of Single Thermoelement Materials by Comparison With A Reference Thermoelement of Similar EMF-Temperature Propertiesbasdownload100% (1)
- ProjectDocument25 pagesProjectAsif Muhammad100% (1)
- Essential Equations For AnaesthesiaDocument217 pagesEssential Equations For Anaesthesiakaran270100% (3)
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 pagesClosed-Loop Control of DC Drives With Controlled RectifierakbarsohailshaikhNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 pagesClosed-Loop Control of DC Drives With Controlled RectifierNithiya MaharajanNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument48 pagesClosed-Loop Control of DC Drives With Controlled Rectifierrida.hamza.muhammadNo ratings yet
- Lecture 9 Controlled Rectifier DC Drives-Closed Loop PDFDocument44 pagesLecture 9 Controlled Rectifier DC Drives-Closed Loop PDFmayajogiNo ratings yet
- Closed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BDocument36 pagesClosed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BOsama TobasyNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument40 pagesClosed-Loop Control of DC Drives With Controlled Rectifierathan19490% (1)
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocument41 pages5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNo ratings yet
- S-17 2030 Lab 2Document18 pagesS-17 2030 Lab 2शर्मिला बस्नेतNo ratings yet
- The Converter (Power Circuit) - 2. The D-STATCOM ControllerDocument42 pagesThe Converter (Power Circuit) - 2. The D-STATCOM ControllersiddhardhaNo ratings yet
- Chapter 4-Closed Loop DC Motor ControlDocument58 pagesChapter 4-Closed Loop DC Motor ControlBoughiout Islam abd elsammedNo ratings yet
- DC Motor Drives 2007Document48 pagesDC Motor Drives 2007stubborn002No ratings yet
- Servo MotorDocument16 pagesServo MotorMinh Tuan Tran100% (1)
- Modelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeDocument9 pagesModelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeJames XgunNo ratings yet
- DCM SessoinDocument63 pagesDCM SessoinLakshmiNo ratings yet
- 1 Introduction To Electrical Drive SystemsDocument30 pages1 Introduction To Electrical Drive Systemsngobi25eddyNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- REPS 12 PaperDocument7 pagesREPS 12 PaperbharathesecNo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Closed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueDocument4 pagesClosed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueLoyel RoseNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- DavidDocument25 pagesDavidgtchsekharNo ratings yet
- Induction MachineDocument20 pagesInduction MachineUsama RaoNo ratings yet
- Grid Imposed Frequency VSC SystemDocument27 pagesGrid Imposed Frequency VSC SystemTshibain TshibunguNo ratings yet
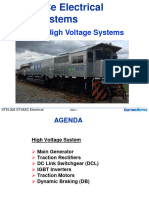
- 03 Gt46ac HV SystemsDocument56 pages03 Gt46ac HV SystemsRafael Dutil LucianaNo ratings yet
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Direct Torque Control of Induction MotorDocument37 pagesDirect Torque Control of Induction Motorpuria_rishabhNo ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- DC MotorsDocument58 pagesDC MotorsSuhanNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- AC - Motor PracDocument9 pagesAC - Motor PracK PranavNo ratings yet
- F10 Feedback Control SystemsDocument13 pagesF10 Feedback Control SystemsAlyssonAlmeidaNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- Transmission Line Power Transfer Capability Improvement, Case StudyDocument5 pagesTransmission Line Power Transfer Capability Improvement, Case StudyMuhammad NawalNo ratings yet
- Closed Loop Control of Buck ConverterDocument10 pagesClosed Loop Control of Buck ConverterlaxmandasriNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- PSD Course File 2011-12Document40 pagesPSD Course File 2011-12Sethupathi CmNo ratings yet
- Ce 2 PDFDocument72 pagesCe 2 PDFDivya RajanNo ratings yet
- Control System Lab ManualDocument76 pagesControl System Lab ManualYuvaraj Shan50% (2)
- Accounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlDocument7 pagesAccounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlFinito TheEndNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- A High Performance Field-Oriented Control For A Switched Reluctance Motor DriveDocument6 pagesA High Performance Field-Oriented Control For A Switched Reluctance Motor Driveapi-26587237No ratings yet
- Introduction To InvertersDocument27 pagesIntroduction To Invertersselaroth168No ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
- Power Supply Control - DC - DC ConverterDocument32 pagesPower Supply Control - DC - DC Converterdivya k sNo ratings yet
- AC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesDocument31 pagesAC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesAnonymous FKMfvCbNo ratings yet
- Ee2257 LMDocument104 pagesEe2257 LMthamizmaniNo ratings yet
- Unit V Design of Controllers For Drives: 3.1transfer Function For DC MotorDocument12 pagesUnit V Design of Controllers For Drives: 3.1transfer Function For DC Motormanoj kumarNo ratings yet
- DC Motor DrivesDocument53 pagesDC Motor DrivesManoj NNo ratings yet
- Introduction Switched Capacitor CircuitsDocument18 pagesIntroduction Switched Capacitor CircuitsFarheenNo ratings yet
- Discrete Time Synergetic Control For DC-DC Converter: N M N×N N×MDocument6 pagesDiscrete Time Synergetic Control For DC-DC Converter: N M N×N N×MAnonymous KhhapQJVYtNo ratings yet
- Electric Drive - Mid Semsester Examination - 05 - October 2020Document3 pagesElectric Drive - Mid Semsester Examination - 05 - October 2020Tushar SanwareyNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Control BLDC MotorsDocument5 pagesControl BLDC MotorsVasu SureshNo ratings yet
- Electrical DrivesDocument19 pagesElectrical DrivesDr.K.Krishna VeniNo ratings yet
- SMPSDocument59 pagesSMPSDr.K.Krishna VeniNo ratings yet
- Chopper: Class-C or Type-CDocument42 pagesChopper: Class-C or Type-CDr.K.Krishna VeniNo ratings yet
- 3 Types of BrakingDocument19 pages3 Types of BrakingDr.K.Krishna VeniNo ratings yet
- 1.course File - POWER SEMICONDUCTOR DRIVESDocument14 pages1.course File - POWER SEMICONDUCTOR DRIVESDr.K.Krishna VeniNo ratings yet
- Chopper Fed Drives Updated18-10-2021Document44 pagesChopper Fed Drives Updated18-10-2021Dr.K.Krishna VeniNo ratings yet
- BEE Unit-IDocument25 pagesBEE Unit-IDr.K.Krishna VeniNo ratings yet
- Ee Objectives Powerline 2023Document327 pagesEe Objectives Powerline 2023LATIGAR, JEFFERSON 0.No ratings yet
- 03 Handout 1 (4) - 1 PDFDocument6 pages03 Handout 1 (4) - 1 PDFJoyce SevenorioNo ratings yet
- DC Power SourcesDocument50 pagesDC Power SourcesZay YarNo ratings yet
- Tests Performed in An Alternator: Dcresistancetest Open Circuit Test Short Circuit TestDocument30 pagesTests Performed in An Alternator: Dcresistancetest Open Circuit Test Short Circuit TestOSAMANo ratings yet
- Det1013 - Electrical Technology: Introduction To Electric CircuitDocument118 pagesDet1013 - Electrical Technology: Introduction To Electric Circuitcaj7687No ratings yet
- Electrochemistry Activity SheetDocument7 pagesElectrochemistry Activity SheetMary Grace LanwangNo ratings yet
- Time: 1 Hour Max. Marks: 30: All Questions Carry Equal Marks. There Is No Negative MarkingDocument8 pagesTime: 1 Hour Max. Marks: 30: All Questions Carry Equal Marks. There Is No Negative MarkingSarvan SankaranNo ratings yet
- Chapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatDocument123 pagesChapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatskjNo ratings yet
- XII PhysicsDocument11 pagesXII PhysicsAman SinghNo ratings yet
- Zimbabwe School Examinations Council Physics 9188/1Document14 pagesZimbabwe School Examinations Council Physics 9188/1Laura MkandlaNo ratings yet
- GR 12 Term 3 2019 Physical Sciences Resource Pack PDFDocument146 pagesGR 12 Term 3 2019 Physical Sciences Resource Pack PDFKevin SmithNo ratings yet
- APEPDCL Energy Assistant Recruitment 2021 For 398 Junior Lineman PostsDocument33 pagesAPEPDCL Energy Assistant Recruitment 2021 For 398 Junior Lineman PostsRajesh K KumarNo ratings yet
- Experiment 4 Dynamic Response of Temperature Measuring Devices (Transient Heat Transfer)Document6 pagesExperiment 4 Dynamic Response of Temperature Measuring Devices (Transient Heat Transfer)praful2604No ratings yet
- Laboratory Manual of Practical Inorganic Ii Chemistry: M. Pranjoto UtomoDocument69 pagesLaboratory Manual of Practical Inorganic Ii Chemistry: M. Pranjoto UtomoJaju VasuNo ratings yet
- Physics Textbook Chapter - ElectromagnetismDocument28 pagesPhysics Textbook Chapter - ElectromagnetismNagato YukiNo ratings yet
- Physics-Investigatory-Project For ShivDocument19 pagesPhysics-Investigatory-Project For Shivprincerajput917987No ratings yet
- Nernst EquationDocument7 pagesNernst Equationantony2288No ratings yet
- Class 12 Electrostatics Electricity and Magnetism Made Simple NotesDocument68 pagesClass 12 Electrostatics Electricity and Magnetism Made Simple Noteslplc791No ratings yet
- Bachelor of Science: Subject: Chemistry Semester IDocument30 pagesBachelor of Science: Subject: Chemistry Semester Isameer samNo ratings yet
- Batteries and Fuel CellsDocument1 pageBatteries and Fuel CellsnadyahginiceNo ratings yet
- ElectrodynamicsDocument36 pagesElectrodynamicsQadeer BabarNo ratings yet
- Course Structure & Syllabus of B.Tech Programme In: Information TechnologyDocument70 pagesCourse Structure & Syllabus of B.Tech Programme In: Information TechnologyrrNo ratings yet
- Discussion On Pourbaix Diagram PDFDocument55 pagesDiscussion On Pourbaix Diagram PDFA PurposeNo ratings yet
- Chap-3 - Current Electricity - PMDDocument54 pagesChap-3 - Current Electricity - PMDIsaam Ahmed100% (1)
- Faraday's Laws of Electromagnetic InductionDocument31 pagesFaraday's Laws of Electromagnetic InductionAbhishek MohiteNo ratings yet
- ElectricDocument40 pagesElectricLencie Dela CruzNo ratings yet
- Redmi Note 11 Series: XiaomiDocument3 pagesRedmi Note 11 Series: XiaomiLeme playmuzicNo ratings yet