Download as pdf or txt
You might also like
- Manual Dv11kDocument238 pagesManual Dv11kThiên NguyễnNo ratings yet
- Sub 01 012Document21 pagesSub 01 012ARYA JENA100% (1)
- 4 ChapterDocument46 pages4 ChapterRama ChilpuriNo ratings yet
- Part 1 Dynamic Modeling - 2022Document19 pagesPart 1 Dynamic Modeling - 2022MUHAMMAD LUQMAN HAKIMI MOHD ZAMRINo ratings yet
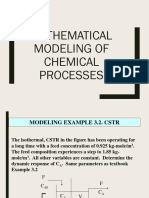
- Mathematical Modelling of Chemical ProcessesDocument39 pagesMathematical Modelling of Chemical ProcessesTamoor TariqNo ratings yet
- Lecture6 MECH452 Transient ConductionDocument36 pagesLecture6 MECH452 Transient ConductionSalman AhmedNo ratings yet
- 1st Law Second Set of Notes - 230727 - 113659Document22 pages1st Law Second Set of Notes - 230727 - 113659Tshiamo MotaungNo ratings yet
- Lecture 3 The First Law and Other Basic Concepts For StudentsDocument58 pagesLecture 3 The First Law and Other Basic Concepts For StudentsJatskinesisNo ratings yet
- Material Balances: Asst. Prof. Dr. Ceren HaktanırDocument37 pagesMaterial Balances: Asst. Prof. Dr. Ceren HaktanırEmre KOÇNo ratings yet
- CH4404 Lecture 01 ModellingProcessDynamics 1Document20 pagesCH4404 Lecture 01 ModellingProcessDynamics 1RRNo ratings yet
- Momentum Transfer-Compressible Flow (Isentropic, Adiabatic, Isothermal)Document21 pagesMomentum Transfer-Compressible Flow (Isentropic, Adiabatic, Isothermal)Sedrick LopezNo ratings yet
- 4 Thermodyn WorkDocument6 pages4 Thermodyn Workosolobrandon2No ratings yet
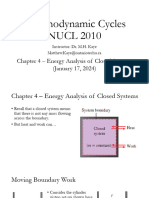
- Thermodynamic Cycles Chapter 4Document30 pagesThermodynamic Cycles Chapter 4Arnab BanerjeeNo ratings yet
- 2 Thermodynamics and Fluid Phase EquilibriaDocument46 pages2 Thermodynamics and Fluid Phase EquilibriaMikhoy RiveralNo ratings yet
- Process Modeling SimulationDocument11 pagesProcess Modeling SimulationNOMAN ASHRAFNo ratings yet
- CHE331-Moodle II - Lecture 3Document17 pagesCHE331-Moodle II - Lecture 3Kevwe Macaulay -GbogidiNo ratings yet
- CompressorsDocument55 pagesCompressorsSumit JoshiNo ratings yet
- FM IntroductionDocument14 pagesFM IntroductionJayden PangilinanNo ratings yet
- Thermodynamics Definitions SummaryDocument8 pagesThermodynamics Definitions Summarylaila.elhosiny03No ratings yet
- MENG3601 - Lecture 7Document36 pagesMENG3601 - Lecture 7yassin elwakilNo ratings yet
- Second Law of ThermodynamicDocument10 pagesSecond Law of ThermodynamicabeerNo ratings yet
- Thermodynamic Cycles Chapter 5Document50 pagesThermodynamic Cycles Chapter 5Arnab BanerjeeNo ratings yet
- 6 Entropy (From Cengel-Boles)Document45 pages6 Entropy (From Cengel-Boles)faqirbalochNo ratings yet
- First LawDocument33 pagesFirst LawKanchha TamangNo ratings yet
- Grade 12 Week 3 PP - Rates (Part 2)Document65 pagesGrade 12 Week 3 PP - Rates (Part 2)Esther SparksNo ratings yet
- Lecture 4Document25 pagesLecture 4mohammed.bm106No ratings yet
- 4a First Law of Thermodynamics - Thermodyn WorkDocument7 pages4a First Law of Thermodynamics - Thermodyn WorkSamuel BoujeeNo ratings yet
- Cre Lab AssignmentDocument7 pagesCre Lab AssignmentRidaNo ratings yet
- Group 7 FixDocument30 pagesGroup 7 Fixyuni fitriaNo ratings yet
- PMS Theory Chapter2Document42 pagesPMS Theory Chapter2moulitechNo ratings yet
- Thermo Chapter 5 Presentation 1sir CastilDocument25 pagesThermo Chapter 5 Presentation 1sir CastilCabagnot Piolo JuliusNo ratings yet
- A Textbook of Electrical Technology Vol. 2 - Theraja-P1Document29 pagesA Textbook of Electrical Technology Vol. 2 - Theraja-P1Muhammad TaimoorNo ratings yet
- MCEE5210 2023F L6 Rate-Based MethodDocument74 pagesMCEE5210 2023F L6 Rate-Based Methodtc1992423No ratings yet
- Kathmandu University: School of EngineeringDocument19 pagesKathmandu University: School of EngineeringBishal LamichhaneNo ratings yet
- Unit 9 NotesDocument78 pagesUnit 9 NotesAindrila KaziNo ratings yet
- P2 - Chapter 1 Work, Internal Energy and 1st Law of ThermoDocument11 pagesP2 - Chapter 1 Work, Internal Energy and 1st Law of Thermoloyovaf500No ratings yet
- Rpweek3 1Document24 pagesRpweek3 1samilkolsuz63No ratings yet
- PMS Experiment 1-Gravity Flow TankDocument17 pagesPMS Experiment 1-Gravity Flow Tank815 PAVANNo ratings yet
- Presentation 5 - January 2019Document26 pagesPresentation 5 - January 2019Muavha MadembeNo ratings yet
- Buoyancy Induced Flow in A CavityDocument11 pagesBuoyancy Induced Flow in A Cavitysk21meb0b55No ratings yet
- Mep341 - Lecture 5Document14 pagesMep341 - Lecture 5Joseph TharwatNo ratings yet
- Thermodynamics: Lec-02, AE210 GasdynamicsDocument14 pagesThermodynamics: Lec-02, AE210 GasdynamicsAnmol KumarNo ratings yet
- Themo Tutorials Part 1Document59 pagesThemo Tutorials Part 1Jenae CarlsonNo ratings yet
- One Dimensional Transient Heat Conduction and Estimation of Thermal DiffusivityDocument14 pagesOne Dimensional Transient Heat Conduction and Estimation of Thermal Diffusivityfaisal58650No ratings yet
- Chemical Engineering ThermodynamicsDocument10 pagesChemical Engineering ThermodynamicsP P DNo ratings yet
- Lect.4. Presentation (Processes)Document24 pagesLect.4. Presentation (Processes)Ali aliraqiNo ratings yet
- PMS Chapter1Document63 pagesPMS Chapter1moulitechNo ratings yet
- Phase Equilibria 1: Problem Formulation (Chapter 6) : Live Your Life. Create Your DestinyDocument32 pagesPhase Equilibria 1: Problem Formulation (Chapter 6) : Live Your Life. Create Your DestinyNARE EDMUNDNo ratings yet
- Lecture 4Document34 pagesLecture 4mohammed.bm106No ratings yet
- Thermodynamics Notes PDFDocument14 pagesThermodynamics Notes PDFLUCKY BHARADWAJNo ratings yet
- Lesson 2.2.2 - Sample Problem (Actual Rankine Cycle)Document14 pagesLesson 2.2.2 - Sample Problem (Actual Rankine Cycle)suga linNo ratings yet
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloNo ratings yet
- Soham Bose PresentationDocument38 pagesSoham Bose PresentationARNAB HALDERNo ratings yet
- Process Thermodynamics by SandlerDocument34 pagesProcess Thermodynamics by SandlerCoOl VoRaNo ratings yet
- TFS I CH5 Lecture NotesDocument16 pagesTFS I CH5 Lecture Notes高誠蔚No ratings yet
- Lecture Notes 2 ThermodynamicsDocument5 pagesLecture Notes 2 ThermodynamicsAndrewNo ratings yet
- Kinetics of Homogeneous ReactionDocument56 pagesKinetics of Homogeneous ReactionSahel SahraeeNo ratings yet
- Optimization Techniques: Sources UsedDocument54 pagesOptimization Techniques: Sources UsedPrasanth ShivanandamNo ratings yet
- 9 2 InstrumentationDocument32 pages9 2 InstrumentationShilpya KurniasihNo ratings yet
- 11 1 Dynamic Closed LoopDocument34 pages11 1 Dynamic Closed LoopShilpya KurniasihNo ratings yet
- 2 2 Mathematical ModelDocument22 pages2 2 Mathematical ModelShilpya KurniasihNo ratings yet
- 11 - 2 Matlab Simulink PIDDocument14 pages11 - 2 Matlab Simulink PIDShilpya KurniasihNo ratings yet
- 1 1 IntroductionDocument47 pages1 1 IntroductionShilpya KurniasihNo ratings yet
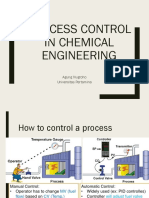
- Process Control in Chemical Engineering: Agung Nugroho Universitas PertaminaDocument23 pagesProcess Control in Chemical Engineering: Agung Nugroho Universitas PertaminaShilpya KurniasihNo ratings yet
- Caption For E-Poster Virtual Vield Trip AIChE UP SC 2021Document2 pagesCaption For E-Poster Virtual Vield Trip AIChE UP SC 2021Shilpya KurniasihNo ratings yet
- Shilpya Kurniasih CE1 PaperFTDocument3 pagesShilpya Kurniasih CE1 PaperFTShilpya KurniasihNo ratings yet
- Detailed Information On The Sister Chapter Program: Forms To Be FilledDocument2 pagesDetailed Information On The Sister Chapter Program: Forms To Be FilledShilpya KurniasihNo ratings yet
- 3 - 1 Laplace TransformDocument23 pages3 - 1 Laplace TransformShilpya Kurniasih100% (1)
- Precipitation TitrationsDocument14 pagesPrecipitation TitrationsShilpya KurniasihNo ratings yet
- EAT 104-Asas Proses Kejuruteraan Kimia / Fundamental of Chemical Engineering ProcessesDocument38 pagesEAT 104-Asas Proses Kejuruteraan Kimia / Fundamental of Chemical Engineering ProcessesShilpya KurniasihNo ratings yet
- Artikel Bahasa Inggris BaruDocument37 pagesArtikel Bahasa Inggris BaruShilpya KurniasihNo ratings yet
- Green House Effect & Global WarmingDocument5 pagesGreen House Effect & Global WarmingAnanya SharmaNo ratings yet
- Irrigation Engineering: Evaporation & Infiltration: Presented By: Nicole Primavera Nicole AlicerDocument20 pagesIrrigation Engineering: Evaporation & Infiltration: Presented By: Nicole Primavera Nicole Alicermich cunananNo ratings yet
- 17I31 - CP01 - 04 (2019-03-14) (Cabinet cp01)Document260 pages17I31 - CP01 - 04 (2019-03-14) (Cabinet cp01)Vincent BuensucesoNo ratings yet
- Intelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementDocument23 pagesIntelligent Valve Actuation - A Radical New Electro-Magnetic Poppet Valve ArrangementTejas shastrakarNo ratings yet
- Qdoc - Tips TPC DQR 002 TRM Ops 011 Cdu r1Document284 pagesQdoc - Tips TPC DQR 002 TRM Ops 011 Cdu r1Trần Minh ĐứcNo ratings yet
- Introduction To HVAC SystemsDocument23 pagesIntroduction To HVAC SystemsstayNo ratings yet
- CBB Tech Data - InchesDocument12 pagesCBB Tech Data - InchesKenny BNo ratings yet
- 4 Wind Energy CH 4Document15 pages4 Wind Energy CH 4mohit pawarNo ratings yet
- MANUAL SC20 CORKEN-EspañolDocument51 pagesMANUAL SC20 CORKEN-Españolbettygamo100% (1)
- Energy Efficient Music Culture in Europe: An EE MUSIC Study: Erik Moholdt / ØyaDocument35 pagesEnergy Efficient Music Culture in Europe: An EE MUSIC Study: Erik Moholdt / ØyaJoao SousaNo ratings yet
- DT821Document4 pagesDT821Emrah MertyürekNo ratings yet
- ICSE Physics Previous Year Question Paper 2017 Solved For Class 10Document1 pageICSE Physics Previous Year Question Paper 2017 Solved For Class 10shashank srivastavaNo ratings yet
- 10 - TroubleshootingDocument10 pages10 - TroubleshootingBARRENECHEA DELGADO ISAACNo ratings yet
- Ebook Basic Civil and Mechanical Engineering PDF Full Chapter PDFDocument60 pagesEbook Basic Civil and Mechanical Engineering PDF Full Chapter PDFgeorge.stillman352100% (33)
- 25H PDFDocument275 pages25H PDFFran ChafNo ratings yet
- 15-501-EP-DS-002 (IG Buffer Vessel Datasheet), Rev.2Document4 pages15-501-EP-DS-002 (IG Buffer Vessel Datasheet), Rev.2Umair A. KhanNo ratings yet
- Manittou BepcoDocument24 pagesManittou BepcocoolfforexNo ratings yet
- Model K 9000 G: High Pressure Washer Operator ManualDocument12 pagesModel K 9000 G: High Pressure Washer Operator Manualrparin187No ratings yet
- Principles of Electricity: Cf:o - .JDocument73 pagesPrinciples of Electricity: Cf:o - .JNina GalesteNo ratings yet
- Habor Heat PipeDocument1 pageHabor Heat PipepradungNo ratings yet
- Smart Street Lighting System Based On Detecting Vehicle MovementDocument4 pagesSmart Street Lighting System Based On Detecting Vehicle MovementNjabulo XoloNo ratings yet
- Sas 8Document12 pagesSas 8Reizel GaasNo ratings yet
- 4.401/4.464 Environmental Technologies in Buildings - Assignment 4Document4 pages4.401/4.464 Environmental Technologies in Buildings - Assignment 4VAVI NZEZANo ratings yet
- Dancil Final Thesis File.Document64 pagesDancil Final Thesis File.Ian Neil BuenaventeNo ratings yet
- Engineering Physics Laser NotesDocument113 pagesEngineering Physics Laser NotesKd kumarNo ratings yet
- VHP Series Four L5774Lt: 1067 - 1280 BHP (795 - 954 KWB)Document2 pagesVHP Series Four L5774Lt: 1067 - 1280 BHP (795 - 954 KWB)JerNo ratings yet
- Electrical Engineering Technology - National Diploma (ND)Document36 pagesElectrical Engineering Technology - National Diploma (ND)Emejuru ChukwuemekaNo ratings yet
- Mark SchemeDocument17 pagesMark SchemequsaielnoorNo ratings yet