Download as pdf or txt
You might also like
- Commutation TechniquesDocument13 pagesCommutation TechniquesSantosh SinghNo ratings yet
- Conventional Vs Non Conventional Power GenerationDocument8 pagesConventional Vs Non Conventional Power Generationrickymartin23No ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Parallel Capacitor Inverter With Feedback DiodesDocument9 pagesParallel Capacitor Inverter With Feedback DiodesJayant Kirpekar100% (1)
- 4 Symmetrical ComponentsDocument4 pages4 Symmetrical ComponentsvirenpandyaNo ratings yet
- Nptel: High Voltage DC Transmission - Web CourseDocument2 pagesNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- Circuit Theory - Lecture Notes, Study Material and Important Questions, AnswersDocument5 pagesCircuit Theory - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Parallel Inverter: Power ElectronicsDocument10 pagesParallel Inverter: Power ElectronicsKiran SmathNo ratings yet
- Tutorial 3 - Phase Controlled AC-DC ConvertersDocument3 pagesTutorial 3 - Phase Controlled AC-DC ConvertersChangyuFuNo ratings yet
- SMPC NotesDocument98 pagesSMPC NotesHarsha Anantwar100% (1)
- Unit Ii Switching TransientsDocument54 pagesUnit Ii Switching TransientsKalai SelvanNo ratings yet
- DMA Controller - 8237Document9 pagesDMA Controller - 8237Umesh Harihara sudanNo ratings yet
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- Eee 304 Lecture Notes - 1Document171 pagesEee 304 Lecture Notes - 1Haritha RkNo ratings yet
- EE T65 Digital Signal ProcessingDocument34 pagesEE T65 Digital Signal ProcessingThiagu Rajiv100% (1)
- RGPV Syllabus Btech Ee 5 Sem All SubjectsDocument17 pagesRGPV Syllabus Btech Ee 5 Sem All SubjectsSandeep TaleNo ratings yet
- Final Phase 1 PPT Major ProjectDocument21 pagesFinal Phase 1 PPT Major ProjectSpandana priyaNo ratings yet
- Basic ElectronicsDocument142 pagesBasic ElectronicsHarshitha CHALUMURI100% (1)
- Static Characteristics of SCR Experiment 1 Aim: To Study The Static Characteristics of SCR Apparatus: Multism Theory: SCR Works in Three ModesDocument9 pagesStatic Characteristics of SCR Experiment 1 Aim: To Study The Static Characteristics of SCR Apparatus: Multism Theory: SCR Works in Three ModesHoward TimbangNo ratings yet
- Seminar Report PARTH PMSMDocument22 pagesSeminar Report PARTH PMSMParth PethkarNo ratings yet
- Bus Bar Differential Protection or Circulating Current ProtectionDocument2 pagesBus Bar Differential Protection or Circulating Current ProtectionsrifaceNo ratings yet
- Ferranti Effect and Skin EffectDocument8 pagesFerranti Effect and Skin EffectMaaz KhanNo ratings yet
- 180 Degree ConductionDocument27 pages180 Degree Conductionsathishsutharsan87No ratings yet
- Dual ConvertersDocument13 pagesDual ConvertersGabriel SanthoshkumarNo ratings yet
- InverterDocument53 pagesInverterAgus SetyawanNo ratings yet
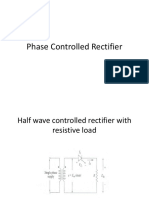
- Phase Controlled RectifierDocument33 pagesPhase Controlled RectifierHarsh HaldiyaNo ratings yet
- Power Electronics: THYRISTOR ProtectionDocument12 pagesPower Electronics: THYRISTOR ProtectionK Lokesh LingaiahNo ratings yet
- Synchronous Machines Question BankDocument10 pagesSynchronous Machines Question BankelecenggNo ratings yet
- Practical - 3 - Four Quadrant Chopper Fed DC DriveDocument15 pagesPractical - 3 - Four Quadrant Chopper Fed DC Drivekiran navaleNo ratings yet
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 pagesTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNo ratings yet
- II Mech - 03 - EE8353 - EDC - Unit 3 PDFDocument4 pagesII Mech - 03 - EE8353 - EDC - Unit 3 PDFPraveena GopiNo ratings yet
- Group5 Lab 09Document6 pagesGroup5 Lab 09FALSERNo ratings yet
- Control System Lab ManualDocument20 pagesControl System Lab ManualvaibhavNo ratings yet
- Electric DrivesDocument2 pagesElectric DrivesnikunjNo ratings yet
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 pagesElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramNo ratings yet
- DC DC Converters (Lecture#03)Document40 pagesDC DC Converters (Lecture#03)usmangul_23No ratings yet
- Single Phase Semi and Full Converter DC Separately Excited MotorDocument3 pagesSingle Phase Semi and Full Converter DC Separately Excited MotorHeliosAlaricNo ratings yet
- EE6703-Special Electrical MachinesDocument13 pagesEE6703-Special Electrical MachinesjagadeeshNo ratings yet
- Single-Phase Converter Systems Containing Ideal RectifiersDocument51 pagesSingle-Phase Converter Systems Containing Ideal Rectifiersselaroth168No ratings yet
- Series InverterDocument4 pagesSeries InverterPadmajManore100% (2)
- Frequency-Domain of Control Systems: Eng R. L. Nkumbwa Copperbelt University 2010Document46 pagesFrequency-Domain of Control Systems: Eng R. L. Nkumbwa Copperbelt University 2010saiNo ratings yet
- Current and Voltage Transformer: Module - 6Document24 pagesCurrent and Voltage Transformer: Module - 6mansi jagtapNo ratings yet
- SCR Firing CircuitsDocument4 pagesSCR Firing CircuitsShubham Bagal100% (1)
- Circuits Devices and ApplicationsDocument30 pagesCircuits Devices and ApplicationsTe NgNo ratings yet
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 pagesModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaNo ratings yet
- 8051 CH2Document89 pages8051 CH2Amardeep PotdarNo ratings yet
- PPTDocument24 pagesPPTRaj VaghelaNo ratings yet
- Chapter 1 - Introduction To Machinery PrinciplesDocument51 pagesChapter 1 - Introduction To Machinery PrinciplesGopinath SubramaniNo ratings yet
- Basic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersDocument25 pagesBasic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- What Is Ferranti EffectDocument3 pagesWhat Is Ferranti Effectboopelectra50% (2)
- UNIT 4 NewDocument46 pagesUNIT 4 NewLakshmipriya SankarNo ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- Chapter TwoDocument57 pagesChapter TwoSolomon LemaNo ratings yet
- Chapter 5 - Lecture#13Document25 pagesChapter 5 - Lecture#13AHMAD ASRI ABD SAMATNo ratings yet
- Diode Rectifier-1 PDFDocument46 pagesDiode Rectifier-1 PDFHamza ZaidNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document6 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Exp-3 (Speed Control by V-F MethodDocument4 pagesExp-3 (Speed Control by V-F MethoduttamNo ratings yet
- Compiled CourseStructure Syllabus 8-8-2020Document43 pagesCompiled CourseStructure Syllabus 8-8-2020uttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document5 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document4 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document5 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Applied Electrical Engineering SyllabusDocument2 pagesApplied Electrical Engineering SyllabusuttamNo ratings yet
- ArrayDocument5 pagesArrayuttamNo ratings yet
- Lecture 07 - 09 - 2020Document5 pagesLecture 07 - 09 - 2020uttamNo ratings yet
- Real Time Data Acquisition SystemDocument34 pagesReal Time Data Acquisition SystemuttamNo ratings yet
- DSA 1 Note-An IntroductionDocument6 pagesDSA 1 Note-An IntroductionuttamNo ratings yet
- Indian Institute of Technology (Indian School of Mines) DhanbadDocument2 pagesIndian Institute of Technology (Indian School of Mines) DhanbaduttamNo ratings yet
- Single End, Known As Top. Last Element Inserted Is Deleted First That's Why It Is LIFODocument5 pagesSingle End, Known As Top. Last Element Inserted Is Deleted First That's Why It Is LIFOuttamNo ratings yet
- Examples: Bubble Sort, Insertion Sort, Merge Sort, Quick Sort, Heap SortDocument10 pagesExamples: Bubble Sort, Insertion Sort, Merge Sort, Quick Sort, Heap SortuttamNo ratings yet
- Note1-Linked ListDocument10 pagesNote1-Linked ListuttamNo ratings yet
- Binary Search Tree:: PropertyDocument6 pagesBinary Search Tree:: PropertyuttamNo ratings yet
- Induction Machine: 1. Slip and Rotor FrequencyDocument8 pagesInduction Machine: 1. Slip and Rotor FrequencyuttamNo ratings yet
- Lecture 09 - 10 - 2020 (Array)Document2 pagesLecture 09 - 10 - 2020 (Array)uttamNo ratings yet
- Informally: Algorithm Input OutputDocument34 pagesInformally: Algorithm Input OutpututtamNo ratings yet
- Speed Control 3-Ph IMDocument5 pagesSpeed Control 3-Ph IMuttamNo ratings yet
- Speed Control 3-Ph IMDocument5 pagesSpeed Control 3-Ph IMuttamNo ratings yet
- Datasheet - Phoenix Inverter 180VA - 750VA - Rev 03 - enDocument2 pagesDatasheet - Phoenix Inverter 180VA - 750VA - Rev 03 - enCulzNo ratings yet
- Inverter SK 2501 FCT PDFDocument64 pagesInverter SK 2501 FCT PDFRuslan RonskiyNo ratings yet
- How Pendulum Clocks WorkDocument18 pagesHow Pendulum Clocks WorkNovira ChandisaNo ratings yet
- Ebook The Load Pull Method of RF and Microwave Power Amplifier Design 1St Edition John Sevic Online PDF All ChapterDocument69 pagesEbook The Load Pull Method of RF and Microwave Power Amplifier Design 1St Edition John Sevic Online PDF All Chaptertodd.dubois859100% (6)
- Benq q7c4 PDFDocument58 pagesBenq q7c4 PDFjose gomezNo ratings yet
- Manual - Sony STR-DH130 PDFDocument36 pagesManual - Sony STR-DH130 PDFAnonymous vFZME7bCWNo ratings yet
- MS Phy PB1 2023-24 Set 3Document5 pagesMS Phy PB1 2023-24 Set 3HarshwardhanNo ratings yet
- Single Turn Wire Wound Potentiometer, R.W-3: Make in India Make in IndiaDocument2 pagesSingle Turn Wire Wound Potentiometer, R.W-3: Make in India Make in IndiaDarshan MakwanaNo ratings yet
- Naval TV CatalogDocument29 pagesNaval TV CatalogradamNo ratings yet
- Schematic Diagrams: LT-42DV1BJ, LT-42DV1BUDocument32 pagesSchematic Diagrams: LT-42DV1BJ, LT-42DV1BUmartin andres rodriguez rengifoNo ratings yet
- NOTE: LSD DP Blinks During Programming.: Operating ModesDocument2 pagesNOTE: LSD DP Blinks During Programming.: Operating Modeselectrifier_suren0% (1)
- Q Series Boiler Troubleshooting ProceducesDocument61 pagesQ Series Boiler Troubleshooting ProceduceshungNo ratings yet
- Class-X Magnetism QuestionsDocument3 pagesClass-X Magnetism QuestionsalamphyNo ratings yet
- Me-Pse Curriculum and SyllabusDocument73 pagesMe-Pse Curriculum and SyllabuslvijayanandNo ratings yet
- Temposonics: Magnetostrictive Linear Position SensorsDocument20 pagesTemposonics: Magnetostrictive Linear Position Sensorssorangel_123No ratings yet
- Common Emitter Un Bypassed Emitter - Fixed Bias ConfigurationDocument14 pagesCommon Emitter Un Bypassed Emitter - Fixed Bias ConfigurationForge lastNo ratings yet
- Regenerative BrakingDocument160 pagesRegenerative Brakingcharlesc5746No ratings yet
- Li-Ion Accu ChargerDocument3 pagesLi-Ion Accu ChargervdwuNo ratings yet
- Consultant's Report For The Week Jan 23 To 28, 2023 - SignedDocument2 pagesConsultant's Report For The Week Jan 23 To 28, 2023 - SignedBeng RosalesNo ratings yet
- A 1 - 57-GHz RF Front-EndDocument8 pagesA 1 - 57-GHz RF Front-EndSreedevi MenonNo ratings yet
- Transformer Test ReportDocument2 pagesTransformer Test ReportAhmad AlshammariNo ratings yet
- IRIS Power Emc - FlyerDocument2 pagesIRIS Power Emc - FlyerVivaldo FreitasNo ratings yet
- Hydro Electric Projects Database-Dec-2011Document14 pagesHydro Electric Projects Database-Dec-2011najonwayNo ratings yet
- Design and Simulation of Different Wireless Power Transfer CircuitsDocument4 pagesDesign and Simulation of Different Wireless Power Transfer CircuitsKrishanSinghNo ratings yet
- FAT FormDocument3 pagesFAT FormfarisNo ratings yet
- GTJZ0408S>JZ0608S Operation Manual FirstDocument33 pagesGTJZ0408S>JZ0608S Operation Manual FirstelsonNo ratings yet
- Infineon-AP56002 Crystal Oscillator Basics-AN-v01 00-ENDocument27 pagesInfineon-AP56002 Crystal Oscillator Basics-AN-v01 00-ENNandhu123No ratings yet
- Tca 440 TDocument11 pagesTca 440 TEL Picasesos TE VA PicarNo ratings yet
- IEC 62040-2 Uninterruptible Power Systems (Ups) - Part 2: Electromagnetic Compatibility (EMC) Requirements Interpretation Sheet 1Document3 pagesIEC 62040-2 Uninterruptible Power Systems (Ups) - Part 2: Electromagnetic Compatibility (EMC) Requirements Interpretation Sheet 1Agfagf212No ratings yet