Download as pdf or txt
You might also like
- Lab 4.5.1 Observing TCP and UDP Using Netstat (Instructor Version)Document7 pagesLab 4.5.1 Observing TCP and UDP Using Netstat (Instructor Version)Rifqi Imaduddin IrfanNo ratings yet
- Interview Questions for IBM Mainframe DevelopersFrom EverandInterview Questions for IBM Mainframe DevelopersRating: 1 out of 5 stars1/5 (1)
- Network Slab RecordDocument50 pagesNetwork Slab RecordSandeep V GowdaNo ratings yet
- Computer Networks: Vii SemesterDocument40 pagesComputer Networks: Vii SemesterAvinash Avi VNo ratings yet
- CN Lab ProgramsDocument36 pagesCN Lab ProgramsKavitha SANo ratings yet
- CN Lab ManualDocument29 pagesCN Lab ManualDominicPNo ratings yet
- ProgramsDocument41 pagesProgramsHimanshu ShekharNo ratings yet
- CN LabmanualDocument39 pagesCN LabmanualNikhil GsNo ratings yet
- ECE 5315: Project 3: Simulation of Pipelined Floating Point Processor Design: Pipelined FP AdderDocument3 pagesECE 5315: Project 3: Simulation of Pipelined Floating Point Processor Design: Pipelined FP AdderSiddarth VenkatramanNo ratings yet
- Tutorial ProjectDocument16 pagesTutorial ProjectMuhammadNizarArifansyahNo ratings yet
- Computer Networks Lab Manual: Vii SemesterDocument49 pagesComputer Networks Lab Manual: Vii SemesterGourav MehtaNo ratings yet
- CN Lab ManualDocument46 pagesCN Lab Manualsundaravanan_rm100% (1)
- Cgi 0002 Serial MSCOMMDocument7 pagesCgi 0002 Serial MSCOMMAndrésMateoNo ratings yet
- Ns 2 Part 1Document7 pagesNs 2 Part 1Ketan DasNo ratings yet
- Computer Networks Lab ManualDocument45 pagesComputer Networks Lab ManualamitNo ratings yet
- Technical SolutionsDocument5 pagesTechnical SolutionsMihaela NistorNo ratings yet
- XPC Target Tutorial - r2Document22 pagesXPC Target Tutorial - r2dunertoNo ratings yet
- Usb1relay ManualDocument12 pagesUsb1relay ManualmajuiceeNo ratings yet
- Serial Port rs232Document35 pagesSerial Port rs232dokeosNo ratings yet
- Index: S.No Name of The Practical Page No. SignatureDocument8 pagesIndex: S.No Name of The Practical Page No. Signaturevishugrg2No ratings yet
- Ee529 Asg2Document16 pagesEe529 Asg2dd23015No ratings yet
- LDmicro - Manual InglesDocument17 pagesLDmicro - Manual InglesMoacyr_Jr0% (1)
- Assign 3Document5 pagesAssign 3api-252659046No ratings yet
- MTRDocument7 pagesMTRmaroNo ratings yet
- NS2 (Network Simulator Version 2) ManualDocument9 pagesNS2 (Network Simulator Version 2) ManualFatima Zahra LeNo ratings yet
- 2-TX FSK 15-16 Part 1Document8 pages2-TX FSK 15-16 Part 1Đặng Hoài Sơn100% (1)
- Simulator Testing On CentOS SetupDocument5 pagesSimulator Testing On CentOS SetupSantosh Aditya Sharma ManthaNo ratings yet
- Bioloid DynamixelDocument53 pagesBioloid DynamixelEduardo ZavalaNo ratings yet
- NS2 (Network Simulator Version 2) ManualDocument9 pagesNS2 (Network Simulator Version 2) Manualsathya_mca17No ratings yet
- Manual LDMicroDocument15 pagesManual LDMicroBlanca Hernández IslasNo ratings yet
- Homework 1: Wireless Sensor NetworksDocument3 pagesHomework 1: Wireless Sensor NetworksNgọc TháiNo ratings yet
- Introduction To GNUPlotDocument47 pagesIntroduction To GNUPlotapi-3772340100% (2)
- Application Note 1Document7 pagesApplication Note 1hossam_fadeel2560No ratings yet
- Computer Network LaboratorynewDocument63 pagesComputer Network LaboratorynewDeepa JerinNo ratings yet
- Serial COM Port Communications Using C#Document9 pagesSerial COM Port Communications Using C#Ram EngineerNo ratings yet
- Netstat TutorialDocument6 pagesNetstat TutorialAlex Moki100% (1)
- Using Wireshark To Observe The TCP 3-Way HandshakeDocument8 pagesUsing Wireshark To Observe The TCP 3-Way HandshakeIshmael BatumbakalNo ratings yet
- Experiment 6Document30 pagesExperiment 6sujith_mathewNo ratings yet
- CN ManualDocument76 pagesCN Manual30922No ratings yet
- Lab #2: Contention-Aware Scheduling To in Wireless NetworksDocument5 pagesLab #2: Contention-Aware Scheduling To in Wireless NetworksvsalaiselvamNo ratings yet
- Matlab and Modelsim LinkingDocument13 pagesMatlab and Modelsim LinkingfkngmdrNo ratings yet
- Sample Code OfdmDocument15 pagesSample Code Ofdmanithaedison1100% (1)
- Tictoc Tutorial 4Document4 pagesTictoc Tutorial 4Azman AzmiNo ratings yet
- 2SIT325-21P Network Performance Evaluation-TaskSheetDocument5 pages2SIT325-21P Network Performance Evaluation-TaskSheetNarendraNo ratings yet
- Inet TutorialDocument68 pagesInet Tutorialmichele.garauNo ratings yet
- Exile 2000 International Coding TeamDocument36 pagesExile 2000 International Coding TeamManuel VillasanaNo ratings yet
- Serial ProgrammingDocument7 pagesSerial ProgrammingDanny FernandoNo ratings yet
- 5.3.7 Lab - Introduction To Wireshark - Es XLDocument13 pages5.3.7 Lab - Introduction To Wireshark - Es XLJeelon MTNo ratings yet
- Network LabDocument24 pagesNetwork Labget_togetherNo ratings yet
- Linux Ubuntu 12.04: Network Commands 2Document14 pagesLinux Ubuntu 12.04: Network Commands 2harish sharmaNo ratings yet
- Fprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdDocument5 pagesFprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdbaruaeeeNo ratings yet
- Lab ManualDocument46 pagesLab ManualNeer ShNo ratings yet
- CE00731 M NST Assignment 1 (OPNET NetworkDesign)Document9 pagesCE00731 M NST Assignment 1 (OPNET NetworkDesign)Yugaprashanthan Navaratnan100% (1)
- HpingDocument6 pagesHpingRhysio ErenNo ratings yet
- CN Lab ManualDocument71 pagesCN Lab ManualmanasisomanNo ratings yet
- 1 BM19 MCA15 FurkhanDocument42 pages1 BM19 MCA15 FurkhanJonathan fanaiNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- RasporedDocument1 pageRasporedMarko ZekićNo ratings yet
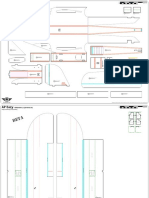
- AP Eazy 6in Propeller Mod A4Document1 pageAP Eazy 6in Propeller Mod A4Marko ZekićNo ratings yet
- AP Eazy PDFDocument2 pagesAP Eazy PDFMarko ZekićNo ratings yet
- Odluka Stanovi Veternik 171228Document17 pagesOdluka Stanovi Veternik 171228Marko ZekićNo ratings yet
- KontDocument3 pagesKontMarko ZekićNo ratings yet
- Any BusDocument4 pagesAny BusgreggherbigNo ratings yet
- DHCP Guide Appendix 01101Document54 pagesDHCP Guide Appendix 01101DC NewbieNo ratings yet
- The Objective of These Question Is To Help You Reading The Book and Focus On Important Topics in Chapter 5Document3 pagesThe Objective of These Question Is To Help You Reading The Book and Focus On Important Topics in Chapter 5Abdul Rahman AL-MoghrabiNo ratings yet
- CSE DnsDocument19 pagesCSE DnsKumar Kaushal 040No ratings yet
- Ccna CCNP Juniper Windows Cert Study Blogspot ComDocument4 pagesCcna CCNP Juniper Windows Cert Study Blogspot Comprm200829No ratings yet
- DCSE1000 Certification AnswersDocument32 pagesDCSE1000 Certification AnswersRicardo Andrade100% (1)
- Real-Time, Secure, Two-Way Communications: /thurayatelecom Follow Us OnDocument8 pagesReal-Time, Secure, Two-Way Communications: /thurayatelecom Follow Us OnKahkashanNo ratings yet
- Internet Owamp CookbookDocument19 pagesInternet Owamp CookbookJeffrey PeekoNo ratings yet
- Ipoque Manual GuideDocument100 pagesIpoque Manual GuideBijoy Benny Thomas0% (1)
- Unit 4 2 Marks MCDocument2 pagesUnit 4 2 Marks MCHem RameshNo ratings yet
- Curriculum-Vitae: Sunil Kumar Permanent AddressDocument5 pagesCurriculum-Vitae: Sunil Kumar Permanent AddressKiran ModiNo ratings yet
- Enabling AI in Future Wireless Networks: A Data Life Cycle PerspectiveDocument42 pagesEnabling AI in Future Wireless Networks: A Data Life Cycle PerspectiveVarun RavishankarNo ratings yet
- Cyber AttacksDocument1 pageCyber AttacksShreyas SanghviNo ratings yet
- Virtualization in IEC 61850 Digital Substations 1571238277Document8 pagesVirtualization in IEC 61850 Digital Substations 1571238277hggjvNo ratings yet
- NX OsDocument690 pagesNX OsCCNA classNo ratings yet
- ATM PVC ConfigurationDocument6 pagesATM PVC ConfigurationTriveni GudityNo ratings yet
- Tvs Factsheet AsureVIP CsixDocument2 pagesTvs Factsheet AsureVIP CsixUsha KrishnaNo ratings yet
- Intecont Tersus Apresentação Das DiferençasDocument17 pagesIntecont Tersus Apresentação Das DiferençasRicardo Rangel100% (1)
- Solutions For Homework #1: SolutionDocument26 pagesSolutions For Homework #1: SolutionalexNo ratings yet
- Client Server and p2p NetworkDocument4 pagesClient Server and p2p NetworkTanaka ZhouNo ratings yet
- 5g Protocol TestingDocument3 pages5g Protocol TestingabhinashNo ratings yet
- 11gR2 RAC Openfiler Install Page1 2 3Document83 pages11gR2 RAC Openfiler Install Page1 2 3vikNo ratings yet
- Study of Gswan EnhancementDocument37 pagesStudy of Gswan EnhancementSunil PillaiNo ratings yet
- Airconsole User Manual Full-V2.51Document48 pagesAirconsole User Manual Full-V2.51HarithNo ratings yet
- Quick Installation Guide: 4G Lte Router DWR-M920Document5 pagesQuick Installation Guide: 4G Lte Router DWR-M920Ali AlialiNo ratings yet
- Advanced Mikrotik Training: Routing (MTCRE)Document6 pagesAdvanced Mikrotik Training: Routing (MTCRE)teruno tri saputraNo ratings yet
- Typologies FTTS - MLPPP - FHIPDocument14 pagesTypologies FTTS - MLPPP - FHIPayoub khalfaouiNo ratings yet
- Key Use Cases Web Applications: Flexible Application ModelDocument2 pagesKey Use Cases Web Applications: Flexible Application Modelabdelhak badaouiNo ratings yet
- 12 - DH-PFS4210-8GT-150 - Datasheet-12Dec18 - OKDocument1 page12 - DH-PFS4210-8GT-150 - Datasheet-12Dec18 - OKRen RenNo ratings yet
- EtherBERT 111202017741Document11 pagesEtherBERT 111202017741alamsyah.elitsNo ratings yet