Download as pdf or txt
You might also like
- The Cadbury Code of Best Practices Had 19 RecommendationsDocument2 pagesThe Cadbury Code of Best Practices Had 19 RecommendationsAnam Shoaib82% (11)
- Linear Quadratic Regulator Applied To A Nonlinear Single Link Flexible Joint ManipulatorDocument11 pagesLinear Quadratic Regulator Applied To A Nonlinear Single Link Flexible Joint Manipulatoranon_93685582No ratings yet
- Analysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoDocument6 pagesAnalysis of Fractional - Order Robot Axis Dynamics J.M. Rosario, D. Dumur, J.A. Tenreiro MachadoVignesh RamakrishnanNo ratings yet
- Modeling and Control of 2-DOF Robot ArmDocument8 pagesModeling and Control of 2-DOF Robot ArmOtter OttersNo ratings yet
- Model Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicDocument6 pagesModel Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicAzeddine DemNo ratings yet
- People-Following System With Mobile RobotDocument6 pagesPeople-Following System With Mobile RobotAlejandro MisesNo ratings yet
- Modelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRDocument6 pagesModelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRtamsidebd87No ratings yet
- Modeling and Control of 2-DOF Robot Arm: November 2018Document9 pagesModeling and Control of 2-DOF Robot Arm: November 2018Lavinia CuldaNo ratings yet
- Port-Controlled Hamiltonian and Sliding Mode Control of Gantry Robot Based On Induction Motor DrivesDocument10 pagesPort-Controlled Hamiltonian and Sliding Mode Control of Gantry Robot Based On Induction Motor DrivesAbo KikiNo ratings yet
- 6614 CNC 345Document10 pages6614 CNC 345Martino Ojwok AjangnayNo ratings yet
- Development of An Iterative Learning Based Tip Position Controller of A Flexible Link Robot2017 01 15 - 09 - 31 - 14Document7 pagesDevelopment of An Iterative Learning Based Tip Position Controller of A Flexible Link Robot2017 01 15 - 09 - 31 - 14Anand SinghNo ratings yet
- Unluturk 2013Document5 pagesUnluturk 2013Rajat SinghNo ratings yet
- PID Controller Design For A Magnetic Levitation System Using An Intelligent Optimisation AlgorithmDocument9 pagesPID Controller Design For A Magnetic Levitation System Using An Intelligent Optimisation Algorithmambachew bizunehNo ratings yet
- Model-Free Decentralized Control For Robot Manipulators: of ofDocument6 pagesModel-Free Decentralized Control For Robot Manipulators: of ofDaniel Alvarado MejiaNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- High Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmDocument24 pagesHigh Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmRameez HayatNo ratings yet
- Quasi-Physical Modeling of Robot IRB 120 Using SimDocument17 pagesQuasi-Physical Modeling of Robot IRB 120 Using SimManh Nguyen TienNo ratings yet
- Ijre 5 028Document17 pagesIjre 5 028Hanan ShayiboNo ratings yet
- Simulation of Industrial Robots' Six Axes Manipulator Arms - A Case StudyDocument9 pagesSimulation of Industrial Robots' Six Axes Manipulator Arms - A Case Studymohmmade .zkNo ratings yet
- 5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyDocument7 pages5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologySasha NarvaezNo ratings yet
- Resumen: Universidad VeracruzanaDocument8 pagesResumen: Universidad VeracruzanaJavier garridó melendezNo ratings yet
- PID Controller Design For A Magnetic Levitation System Using An IntelligentDocument8 pagesPID Controller Design For A Magnetic Levitation System Using An Intelligentambachew bizunehNo ratings yet
- Linear Algebra Applied To Kinematic ControlDocument11 pagesLinear Algebra Applied To Kinematic ControlIng. José García, CSSONo ratings yet
- MPC Control and LQ Optimal Control of A Two-Link Robot ArmDocument14 pagesMPC Control and LQ Optimal Control of A Two-Link Robot ArmJonathan D. PortaNo ratings yet
- MPC Control and LQ Optimal Control of A Two-Link Robot Arm PDFDocument14 pagesMPC Control and LQ Optimal Control of A Two-Link Robot Arm PDFAzeddine DemNo ratings yet
- A Simulink Environment For Simulation and Control of Flexible Manipulator SystemsDocument6 pagesA Simulink Environment For Simulation and Control of Flexible Manipulator SystemsselvamNo ratings yet
- 5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyDocument7 pages5DOF Manipulator Simulation Based On MATLAB-Simulink MethodologyChristian Ismaël Tcheutchoua TakamNo ratings yet
- Point To PointDocument7 pagesPoint To PointKaarthikrubanNo ratings yet
- Performance Analysis of Pid, PD and Fuzzy Controllers For Position Control of 3-Dof Robot ManipulatorDocument8 pagesPerformance Analysis of Pid, PD and Fuzzy Controllers For Position Control of 3-Dof Robot Manipulatorد. ثائر جبار نتيشNo ratings yet
- A Prototyping of 2-DOF Robot Arm Using Feedback Control SystemDocument5 pagesA Prototyping of 2-DOF Robot Arm Using Feedback Control Systembình nghuyễnNo ratings yet
- Adaptive Fuzzy Iterative Learning Controller For X-Y Table Position ControlDocument6 pagesAdaptive Fuzzy Iterative Learning Controller For X-Y Table Position Controlddatdh1No ratings yet
- 2 DOF Articulated Pen PlotterDocument19 pages2 DOF Articulated Pen PlotterAnonymous JNquk43qNo ratings yet
- Gantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABDocument4 pagesGantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABYuva NNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Balancing Control of Two Wheeled Mobile Robot Based On PDFDocument7 pagesBalancing Control of Two Wheeled Mobile Robot Based On PDFvinod kumarNo ratings yet
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- 3D Cable-Based Parallel Robot Simulation Using PDDocument13 pages3D Cable-Based Parallel Robot Simulation Using PDRAZIQ YOUSSEFNo ratings yet
- PR UnamDocument6 pagesPR UnamAlejandro MisesNo ratings yet
- Multibody Approach Matlab GUI For Kinematic and Dynamic Analysis of Planar MechanismsDocument10 pagesMultibody Approach Matlab GUI For Kinematic and Dynamic Analysis of Planar MechanismsAlejandro Martinez ANo ratings yet
- Research Article: Type-2 Fuzzy Logic Controller of A Doubly Fed Induction MachineDocument11 pagesResearch Article: Type-2 Fuzzy Logic Controller of A Doubly Fed Induction MachineBharath ykNo ratings yet
- Modeling Simulation and Position ControlDocument10 pagesModeling Simulation and Position Controlinesboumaiza293No ratings yet
- Robot StanfordDocument8 pagesRobot StanfordLong TrầnNo ratings yet
- A Microcontroller Implementation of Fractional Order ControllerDocument6 pagesA Microcontroller Implementation of Fractional Order ControllerPraveen MathiasNo ratings yet
- Soleymani, Garone, Dorigo - 2015 - Distributed Constrained Connectivity Control For Proximity Networks Based On A Receding Horizon SchemDocument6 pagesSoleymani, Garone, Dorigo - 2015 - Distributed Constrained Connectivity Control For Proximity Networks Based On A Receding Horizon SchemLeonardoNo ratings yet
- Paper 10Document6 pagesPaper 10Daniel G Canton PuertoNo ratings yet
- Cstam Redysim13surilDocument6 pagesCstam Redysim13surilJorge Renato Chirinos QuiñonezNo ratings yet
- An Embedded Controller For The PendubotDocument6 pagesAn Embedded Controller For The PendubotCarlos Alberto Cribillero VegaNo ratings yet
- 8.advances in Mechanical Engineering 2015 LopesDocument8 pages8.advances in Mechanical Engineering 2015 LopesvamshiNo ratings yet
- Optimal Design and Tuning of PID-type Interval Type-2 Fuzzy Logic Controllers For Delta Parallel RobotsDocument12 pagesOptimal Design and Tuning of PID-type Interval Type-2 Fuzzy Logic Controllers For Delta Parallel Robotsmonse369No ratings yet
- 4192 PDFDocument4 pages4192 PDFDiogo RodriguesNo ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Design of Adaptive-Robust Finite-Time Nonlinear Control Inputs For Uncertain Robot ManipulatorsDocument7 pagesDesign of Adaptive-Robust Finite-Time Nonlinear Control Inputs For Uncertain Robot ManipulatorsMartino Ojwok AjangnayNo ratings yet
- Design and Implementation of PI and Fuzzy PID Supervisory Controllers For A Flexible Link RobotDocument6 pagesDesign and Implementation of PI and Fuzzy PID Supervisory Controllers For A Flexible Link RobotMaNo ratings yet
- Robust Fuzzy Tracking Control For An Activated Sludge ProcessDocument6 pagesRobust Fuzzy Tracking Control For An Activated Sludge ProcesskaramaNo ratings yet
- V3i108 PDFDocument8 pagesV3i108 PDFasprillaNo ratings yet
- 17 TrangDocument16 pages17 TrangPhong ĐặngNo ratings yet
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdNo ratings yet
- H2IL Co-Simulation of Cooperative Robots Based On ADAMS, MATLABDocument6 pagesH2IL Co-Simulation of Cooperative Robots Based On ADAMS, MATLABemanuelg902No ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Cash Flow StatementDocument16 pagesCash Flow Statementrajesh337masssNo ratings yet
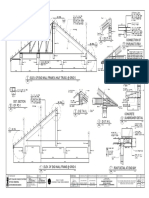
- Detail 6 Connection of Purlins To Rb-1 9Document1 pageDetail 6 Connection of Purlins To Rb-1 9Fritz NatividadNo ratings yet
- Pe 4Document5 pagesPe 4slide_poshNo ratings yet
- BM-24 HRM Assignment Brief - 1654313266Document9 pagesBM-24 HRM Assignment Brief - 1654313266aung san0% (1)
- HPLCDocument12 pagesHPLCviravangsoNo ratings yet
- Microbial Physiology in The Genomic Era: A Revolutionary TaleDocument21 pagesMicrobial Physiology in The Genomic Era: A Revolutionary TaleLiona PatriciaNo ratings yet
- Electronic Reservation Slip (ERS) : 2144543628 11078/jhelum Express Ac 3 Tier Sleeper (3A)Document2 pagesElectronic Reservation Slip (ERS) : 2144543628 11078/jhelum Express Ac 3 Tier Sleeper (3A)nirjra kansalNo ratings yet
- Suzhou Singapore International School: Area of Interaction: Product / Outcome: SpecificationsDocument36 pagesSuzhou Singapore International School: Area of Interaction: Product / Outcome: SpecificationsMatt RobergeNo ratings yet
- Osy MPDocument16 pagesOsy MPPratiksha JadhavNo ratings yet
- An Anspiring Illonggo Visual Artist: Kristoffer George BraseliñoDocument14 pagesAn Anspiring Illonggo Visual Artist: Kristoffer George BraseliñoMarco Esco. CadungganNo ratings yet
- Ce - HydrologyDocument9 pagesCe - HydrologyMadelyn MorilloNo ratings yet
- Plum CalculationDocument33 pagesPlum CalculationMido MagicNo ratings yet
- POLGOVSEA - MOD 1 - IntroDocument30 pagesPOLGOVSEA - MOD 1 - IntroBryan MarasiganNo ratings yet
- Reading Comprehension 2 (Teamwork & Competition)Document16 pagesReading Comprehension 2 (Teamwork & Competition)Ibtisam alanaziNo ratings yet
- Fábrica de Chocolate UNSAACDocument13 pagesFábrica de Chocolate UNSAACFrank Chulla Montes0% (1)
- Ifage Bachelor 1 General English Chapter 1 Basics 1 2023 2024Document22 pagesIfage Bachelor 1 General English Chapter 1 Basics 1 2023 2024coordinateurlpa coordinateurlpaNo ratings yet
- The Art Book Page One, Primary Hands - Portfolio Assessment and Art Lessons For Kids - KinderArtDocument9 pagesThe Art Book Page One, Primary Hands - Portfolio Assessment and Art Lessons For Kids - KinderArttote126No ratings yet
- 6.5 CalcDocument4 pages6.5 CalctholmesNo ratings yet
- M As1 Formative Task: Review Questions: Star Alliance Sky Team OneworldDocument4 pagesM As1 Formative Task: Review Questions: Star Alliance Sky Team OneworldSharlyne PimentelNo ratings yet
- Master Key To Imagination GuideDocument60 pagesMaster Key To Imagination GuideAnonymous ecgjAAD98% (45)
- Db2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview QuestionsDocument21 pagesDb2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview Questionssroul4No ratings yet
- Recent Advances in Enhanced Flooded Battery For Smart Mild Hybrid Power TrainsDocument29 pagesRecent Advances in Enhanced Flooded Battery For Smart Mild Hybrid Power Trains3 GamerNo ratings yet
- How To Use The eFPS Offline Form ApplicationDocument6 pagesHow To Use The eFPS Offline Form ApplicationKristina Clarisse Isidro100% (1)
- Energy Research Institute - Wang SichengDocument17 pagesEnergy Research Institute - Wang SichengADB_SAEN_ProjectsNo ratings yet
- HIVER Waivers sp22 Fady ElmessyDocument2 pagesHIVER Waivers sp22 Fady ElmessyFady Ezzat 1No ratings yet
- Embedded Electronic System Design, MSC - ChalmersDocument9 pagesEmbedded Electronic System Design, MSC - ChalmerskamranNo ratings yet
- Clarkson Lumber Case QuestionsDocument2 pagesClarkson Lumber Case QuestionsJeffery KaoNo ratings yet
- Vendor ListDocument3 pagesVendor ListJohn Son GNo ratings yet
- All Pass Comb FiltersDocument13 pagesAll Pass Comb Filterspho144No ratings yet