Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Conveyor Belts
Jose Luis Hernandez Corona, Jonny Carmona Reyes Gustavo Guillen De Gante, Francisco Cuellar Ortiz
Professor, Industrial Maintenance Engineering, Student, Industrial Maintenance Engineering,
University Technological Of Tlaxcala. University Technological Of Tlaxcala.
City: Mexico City: Mexico
Abstract:- The main feature of this project is focused on
the canned food process, since irregularities have mainly
been detected in the food industries, such as the position of
the label and in cases it is not placed, causing delays and
downtime in the process.
In order to provide a solution to this problem, sensors
were installed on a conveyor belt to identify and classify
poorly labelled products, as well as an LCD screen that
allowed the collection of information from poor quality
products. Also the conveyor belt meets the function of
product transfer, in order to improve the manufacturing
time and selection of quality products.
Keywords:- food, process, manufacturing, time.
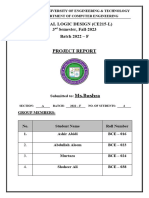
I. INTRODUCTION Fig. 1 Constitution of an elementary belt.
Conveyor belts have been used for decades for the
transportation of goods and have proven their value in the 1 Driving head.
industrial world, as conveyor belts can be adapted to almost 2 Assembly head and tensioner
any local condition. The demand for the use of conveyor belt 3 Upper rollers (load stations)
technology has increased more than ever, which has led to the
4 Lower rollers (return stations)
acceleration of its development to implement new regulations,
especially with regard to its impact on product transfer. 5 Belt.
6 Frame.
For the manufacture of canned food, they have
production lines for the food manufacturing process that form
different workstations, in the area of labelling of cans
problems were found of bad labelling, the main objective of
the conveyor belt design is to detect product labelling by
colour and proximity sensors and thus to provide a quality
assessment, at the same time separate the mislabeled product
and take it to another station for label correction.
II. MATERIALS AND METHODS
A. Parts Constituting a Conveyor Belt
Conveyor belts are basically formed by a flexible closed
belt moving on free-rotation rollers, a drive drum which is
responsible for transmitting movement to the belt, an engine
and a motorcycle-reducer that are responsible for generating
and defining the movement and speed, these and other
components are housed on a metal structure called frame that
provides support and cohesion as shown in figure 1
(Valbuena, 2011).
The flow diagram is the structure of the conveyor belt
operation starting with the ignition of the components. (FIG.1)
IJISRT21OCT598 www.ijisrt.com 1030
Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
FIG.1 Flowchart
The conveyor belt manufactured in 3D printing It is 54 cm long.
(SolidWork) in plastic type PLA, has tension system for a Bandwidth is 60 mm.
correct performance of the system, should not be exposed for
extended times to temperatures greater than 60° C.(FIG.2)
Total height is 80 mm.
IJISRT21OCT598 www.ijisrt.com 1031
Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Fig. 2 The Convevor belt manufactured in 3D
B. Arduino peripherals that we are talking about are potentiometer, push
The microcontroller has what is called an input interface, button, sensor TCS3200, Sensor E18-D80NK.
which is a connection in which we can connect different types
of peripherals to the board. The information of these It also has the output interface, which is responsible for
peripherals that are connected will be transferred to the carrying the information that has been processed in the
microcontroller, which will be in charge of processing the data Arduino with the peripherals the components of the band are:
that reaches you through them therefore the types of Servomotor, Leds, reducer motor, LCD 16x2 display [1].
Fig. 3 Block diagram of the system.
C. Functionality of the H(L293D) Bridge
The Bridge H determines the position and control of the By means of an appropriate control of the input signals and
rotation of the reducer motor of one direction or another that by connecting the DC motor to power paths the H Bridge can
will be commanded by the arduino microcontroller, the also be added more than one motor in the integrated circuit. In
integrated circuit is powered with a voltage of 9V and arduino the Table 1. The function that I followed the logical levels
one is powered with 7V, the maximum speed of the reducing according to the control pins corresponding to each working
motor is 244 RPM and is regulated by a 10K potentiometer. situation is shown [3].
IJISRT21OCT598 www.ijisrt.com 1032
Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Operation S1 S2 S3 S4
Motor moves right 1 0 0 1
Motor moves left 0 1 1 0
Motor free runs 0 0 0 0
Motor brakes 0 1 0 1
Motor brakes 1 0 1 0
Short Power Supply 1 1 0 0
Short Power Supply 0 0 1 1
Short Power Supply 1 1 1 1
Table I. Management of Logical Levels
The block diagram of the experimental carrier belt support is shown in (Fig. 4).
Fig. 4 Conveyor belt block diagram
D. Sensor E18-D80NK
The photoelectric sensor helps us to detect the canned The E18 sensor is powered with a voltage of 5V. The
product with a time of 15 seconds taking advantage of the TCS sensitivity of the sensor is adjustable by means of a
3200 sensor evaluate the label and resume the sense of the potentiometer inside the sensor [4].
band without contact. To connect it to the arduino
microcontroller it is only necessary to connect the sensor
output to a digital input.
The output of this sensor is of type NPN normally open, so
to detect an object the output will be GND and idle state VCC.
In addition, it has an LED that is activated when the sensor
detects an object, which allows us to calibrate and check the
proper functioning of the sensor.
Photoelectric proximity sensors use the principle of
stopping light intensity. This photoelectric sensor is of diffuse
type, therefore, the emitter and the light receiver are integrated
within the sensor and do not need an additional fixed mirror Fig. 5 photoelectric sensor
such as SLR types). Its function is as follows: the emitter
emits a beam of infrared light that when impacting an object is
reflected, this reflection is detected by the photoelectric
receiver and a stop signal is emitted. The sensor does not emit
a signal with distance, it only shows on/off status [5]. (FIG. 5).
IJISRT21OCT598 www.ijisrt.com 1033
Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
can be obtained in turn by activating different color filters, the
colour value of the light irradiated to the TCS3200 colour
sensor can be calculated by them with the label configuration
(Table III).
Output Frequency scaling S0 S1
RED L L
BLUE L H
CLEAR (no fitter) H L
GREEN H H
Table III. TCS3200 output scale Factor
III. RESULTS
The result of the finished prototype, operating with a
current of 12 volts, is shown.
Fig. 6 connection diagram
E. TCS3200 sensor
The colour analyzer consists of the lighting module, the
colour recognition module, the data processing module and the
display module. The lighting module uses the light-emitting
diode (led) with high-brightness white light as a light source
for this analyzer; the color recognition module uses TCS3200
as a color sensor, carried out the early identification of the
colour information of the objects measured.
The color sensor has four types of filter. When the
incident light radiates the TCS3200 sensor, different filters can
be activated by controlling the different combinations of S2
pin, S3 as shown in Table 2. Square waves at different
frequencies are emitted after the conversion of the current in
frequency different colors and light intensities correspond to
the square wave at different frequencies. The typical output
frequency range is 2 Hz - 500 kHz, using the programming pin
S0, S1 of TCS3200 to select the type of output scale factor, as
shown in
Table II.
Photodiode type S2 S3
RED L L
BLUE L H
CLEAR (no fitter) H L
GREEN H H
Table II. Selection of the filter type TCS3200
From the beginning of the three primary colors we know
that the color of the canned product label can be obtained
through the converter when the values of the primary colors
are known. The TCS3200 can only make a color pass when a Fig. 7 Results
color filter is selected, so the values of the three primary colors
IJISRT21OCT598 www.ijisrt.com 1034
Volume 6, Issue 10, October – 2021 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
IV. CONCLUSION
It is concluded that conveyor belts have been of utmost
importance and support in any type of industry, as they reduce
the impact on the effort of workers to transport materials and
products and most importantly optimize production time.
V. ACKNOWLEDGMENT
This study was carried out as part of the integrator
project at the technological university of Tlaxcala, the authors
also thank the authors/editors/ of all the articles, journals and
books from which the bibliography has been extracted.
REFERENCES
[1.] Armando. J. (2012) DESIGN OF A CONVEYOR BELT.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA
SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA UNIDADZACATENCO:
https://tesis.ipn.mx/jspui/bitstream/123456789/10563/1/1
00.
[2.] D. Mario. S.G. (2013) DESIGN OF A CONVEYOR
BELT USING MATLAB GUIDE. UNIVERSIDAD
CARLOS III DE MADRID ESCUELA POLITÉCNICA
SUPERIOR:
https://core.ac.uk/download/pdf/29405026.pdf
[3.] Hugo Armando G.L. (2011) DESIGN AND
CONSTRUCTION OF AN AUTOMATED
DEMONSTRATION SYSTEM FOR HANDLING
PRODUCTS, CONVEYOR BELT AND VISION,
BELONGING TO P&R NEUMÁTICA LTDA.
UNDERGRADUATE PRE-PROJECT:
http://biblioteca.usbbog.edu.co:8080/Biblioteca/BDigital/
64709.pdf
[4.] PedroAngel(2019)sensorhttps://naylampmechatronics.co
m/sensoresproximidad/236-sensor-de-proximidad-
fotoelectrico-infrarrojo-e18-d80nk.html
[5.] Sensorred(2008)https://www.geekfactory.mx/tienda/sens
ores/e18-d80nk-sensor-de-proximidad-infrarrojo/.
IJISRT21OCT598 www.ijisrt.com 1035
You might also like
- Members' Directory 2023 ICSB FinalDocument228 pagesMembers' Directory 2023 ICSB FinalJoynul Abedin100% (1)
- Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerDocument5 pagesObstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerkentNo ratings yet
- Tvet in BruneiDocument17 pagesTvet in Bruneiarchim_azymaNo ratings yet
- PDF GenfinalDocument29 pagesPDF GenfinalLorenzoNo ratings yet
- Pid 21Document6 pagesPid 21marco gonsalez moraNo ratings yet
- Proposal For Auto Winding MachineDocument4 pagesProposal For Auto Winding Machinekalu chimdiNo ratings yet
- Simulation For Feeder Protection With Micro-Controller in ProteusDocument5 pagesSimulation For Feeder Protection With Micro-Controller in ProteusEditor IJRITCCNo ratings yet
- Evaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthyDocument5 pagesEvaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthySubu ManiNo ratings yet
- Control System Upgradation With Linear Actuator in Coil Unloading MachineDocument7 pagesControl System Upgradation With Linear Actuator in Coil Unloading MachineIJRASETPublicationsNo ratings yet
- Auto Tuning High Current Motor Control Unit, Journal ArticleDocument9 pagesAuto Tuning High Current Motor Control Unit, Journal ArticleShreyas BorseNo ratings yet
- Mec623 Scotch Yoke Technical ReportDocument39 pagesMec623 Scotch Yoke Technical ReportAhmad AfieszNo ratings yet
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Document33 pagesObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Debojit DasNo ratings yet
- Design and Construction of Parcel Wrapping System Using ArduinoDocument4 pagesDesign and Construction of Parcel Wrapping System Using ArduinoEditor IJTSRDNo ratings yet
- Automatic Railway Gate Control and Track Switching: Rajat Kumar Singh, Tanu SachdevaDocument6 pagesAutomatic Railway Gate Control and Track Switching: Rajat Kumar Singh, Tanu SachdevaAastiNo ratings yet
- اردوينو pidDocument4 pagesاردوينو pidgadaNo ratings yet
- Automatic Escalator Control System Using PLC Ijariie1975Document5 pagesAutomatic Escalator Control System Using PLC Ijariie1975Carl Justin de Jesus100% (1)
- "Speed Control of DC Motor by Using PWM": IjarcceDocument3 pages"Speed Control of DC Motor by Using PWM": IjarcceRishi GaddaNo ratings yet
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNo ratings yet
- Speed Control of DC Motor by Various MethodsDocument5 pagesSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINo ratings yet
- A New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino MicrocontrollerDocument6 pagesA New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontrollerرشيد بن صغيرNo ratings yet
- Final Reportwith HWDocument19 pagesFinal Reportwith HWtuan.tranminhvtNo ratings yet
- DLD ReportDocument9 pagesDLD Reportaleemabdullah96No ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- AbstractDocument8 pagesAbstractPooja GNo ratings yet
- PLC and Hmi For Conveyor Monitoring and Fault DetectionDocument5 pagesPLC and Hmi For Conveyor Monitoring and Fault DetectionIJAR JOURNALNo ratings yet
- Microcontroller Based Lift System IJERTV1IS1010 PDFDocument3 pagesMicrocontroller Based Lift System IJERTV1IS1010 PDFshamussa ShakmakNo ratings yet
- Yang 2019 IOP Conf. SerDocument7 pagesYang 2019 IOP Conf. SerParvej SinglaNo ratings yet
- A Low Cost and Flexible Open Source Inverted Pendulum For Feedback Control Laboratory CoursesDocument13 pagesA Low Cost and Flexible Open Source Inverted Pendulum For Feedback Control Laboratory CoursesPabloPalaciosAvilaNo ratings yet
- Robotic Arm: MimickingDocument5 pagesRobotic Arm: MimickingMaitriya DamaniNo ratings yet
- 119 35 Design....... p2Document8 pages119 35 Design....... p2habte gebreial shrashrNo ratings yet
- IOT Based Remote Monitoring For HT Motors in ThermDocument7 pagesIOT Based Remote Monitoring For HT Motors in ThermGokulnathan NNo ratings yet
- TC 4138290Document21 pagesTC 4138290rogeriocorrea601No ratings yet
- Degital Techacometer.Document5 pagesDegital Techacometer.poornarithikNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Solar Powered Speed Control of Brushless DC MotorDocument7 pagesSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsNo ratings yet
- Case Study (Balancing Robot)Document10 pagesCase Study (Balancing Robot)Homer Jay ManabatNo ratings yet
- Ijireeice 2022 10642Document5 pagesIjireeice 2022 10642Bhavya ParekhNo ratings yet
- LVDT Trainer ST2303 OperatingDocument24 pagesLVDT Trainer ST2303 Operatingjaspreet964100% (3)
- Alcohol Detection and Engine Locking of Vehicle Using Embedded ModelDocument4 pagesAlcohol Detection and Engine Locking of Vehicle Using Embedded ModelEditor IJRITCCNo ratings yet
- Line Follower RobotDocument29 pagesLine Follower RobotSebastin AshokNo ratings yet
- Electric Press Machine by Using Stepper MotorDocument11 pagesElectric Press Machine by Using Stepper MotorIJRASETPublicationsNo ratings yet
- Controlling A Car Using Gesture by Accelerometer With The Help of Arduino NanoDocument6 pagesControlling A Car Using Gesture by Accelerometer With The Help of Arduino Nanopraveen kumarNo ratings yet
- Design of Laparoscopic Morcellator Endo-Surgery InstrumentDocument7 pagesDesign of Laparoscopic Morcellator Endo-Surgery InstrumentIJRASETPublicationsNo ratings yet
- Arduino Speed Control DC Motor LabVIEWDocument4 pagesArduino Speed Control DC Motor LabVIEWFaraheddine BelkacemNo ratings yet
- NDT2012 2a2 PDFDocument12 pagesNDT2012 2a2 PDFIvan MauricioNo ratings yet
- Study of Speed Control of DC Series Motor Using DC ChopperDocument9 pagesStudy of Speed Control of DC Series Motor Using DC ChopperKedari Sri Chaithanya ReddyNo ratings yet
- Design and Implementation of A Digital TachometerDocument3 pagesDesign and Implementation of A Digital TachometerInnovative Research Publications0% (1)
- Self Balancing Robot: International Journal For Research in Applied Science & Engineering Technology (IJRASET)Document5 pagesSelf Balancing Robot: International Journal For Research in Applied Science & Engineering Technology (IJRASET)رشيد بن صغيرNo ratings yet
- Project Synopsis 2Document21 pagesProject Synopsis 2shailesh devaneNo ratings yet
- B106 Rotary Encoder User's ManualDocument10 pagesB106 Rotary Encoder User's ManualTan Chin LuhNo ratings yet
- Design and Development of Bionic Hand Using Voice ControlDocument5 pagesDesign and Development of Bionic Hand Using Voice ControlInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Vehicle Speed Monitor ReportDocument20 pagesVehicle Speed Monitor ReportZoheb mamooNo ratings yet
- A Novel Control Method For Roll Gap of Roller CrusDocument8 pagesA Novel Control Method For Roll Gap of Roller Crusmu.loa91No ratings yet
- Questions and AnswersDocument15 pagesQuestions and AnswersMahtab GhummanNo ratings yet
- PLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocument5 pagesPLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyGS AshishNo ratings yet
- Submitted in Partial Fulfillment of The Requirements of The Degree in Bachelor of Technology in Biomedical EngineeringDocument40 pagesSubmitted in Partial Fulfillment of The Requirements of The Degree in Bachelor of Technology in Biomedical EngineeringDivya VermaNo ratings yet
- Advanced Line Following RobotDocument17 pagesAdvanced Line Following Robotminh nguyenNo ratings yet
- Design of Robotic Arm Controller Using Android AppDocument9 pagesDesign of Robotic Arm Controller Using Android AppIJRASETPublicationsNo ratings yet
- Hardware AnalysisDocument10 pagesHardware AnalysisD scribdNo ratings yet
- Department of Electronics and Communication Engineering Faculty of Engineering and Technology, SRM ISTDocument6 pagesDepartment of Electronics and Communication Engineering Faculty of Engineering and Technology, SRM ISTAnjali ShankarNo ratings yet
- IOT Based Automatic Water Container Filler Using ArduinoDocument6 pagesIOT Based Automatic Water Container Filler Using ArduinoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Controlling DC Motor Using Microcontroller (PIC16F72) With PWMDocument4 pagesControlling DC Motor Using Microcontroller (PIC16F72) With PWMAkah PreciousNo ratings yet
- Integration of Information Communication Technology, Strategic Leadership and Academic Performance in Universities in North Kivu, Democratic Republic of CongoDocument7 pagesIntegration of Information Communication Technology, Strategic Leadership and Academic Performance in Universities in North Kivu, Democratic Republic of CongoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Effects of Liquid Density and Impeller Size with Volute Clearance on the Performance of Radial Blade Centrifugal Pumps: An Experimental ApproachDocument16 pagesThe Effects of Liquid Density and Impeller Size with Volute Clearance on the Performance of Radial Blade Centrifugal Pumps: An Experimental ApproachInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dynamic Analysis of High-Rise Buildings for Various Irregularities with and without Floating ColumnDocument3 pagesDynamic Analysis of High-Rise Buildings for Various Irregularities with and without Floating ColumnInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intrusion Detection and Prevention Systems for Ad-Hoc NetworksDocument8 pagesIntrusion Detection and Prevention Systems for Ad-Hoc NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Fuzzy based Tie-Line and LFC of a Two-Area Interconnected SystemDocument6 pagesFuzzy based Tie-Line and LFC of a Two-Area Interconnected SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Geotechnical Assessment of Selected Lateritic Soils in Southwest Nigeria for Road Construction and Development of Artificial Neural Network Mathematical Based Model for Prediction of the California Bearing RatioDocument10 pagesGeotechnical Assessment of Selected Lateritic Soils in Southwest Nigeria for Road Construction and Development of Artificial Neural Network Mathematical Based Model for Prediction of the California Bearing RatioInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Innovative Mathematical Insights through Artificial Intelligence (AI): Analysing Ramanujan Series and the Relationship between e and π\piDocument8 pagesInnovative Mathematical Insights through Artificial Intelligence (AI): Analysing Ramanujan Series and the Relationship between e and π\piInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Breaking Down Barriers To Inclusion: Stories of Grade Four Teachers in Maintream ClassroomsDocument14 pagesBreaking Down Barriers To Inclusion: Stories of Grade Four Teachers in Maintream ClassroomsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Importance of Early Intervention of Traumatic Cataract in ChildrenDocument5 pagesImportance of Early Intervention of Traumatic Cataract in ChildrenInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Novel Approach to Template Filling with Automatic Speech Recognition for Healthcare ProfessionalsDocument6 pagesA Novel Approach to Template Filling with Automatic Speech Recognition for Healthcare ProfessionalsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diode Laser Therapy for Drug Induced Gingival Enlaregement: A CaseReportDocument4 pagesDiode Laser Therapy for Drug Induced Gingival Enlaregement: A CaseReportInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Analysis of Factors Obstacling Construction Work in The Tojo Una-Una Islands RegionDocument9 pagesAnalysis of Factors Obstacling Construction Work in The Tojo Una-Una Islands RegionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Occupational Safety: PPE Use and Hazard Experiences Among Welders in Valencia City, BukidnonDocument11 pagesOccupational Safety: PPE Use and Hazard Experiences Among Welders in Valencia City, BukidnonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship of Total Quality Management Practices and Project Performance With Risk Management As Mediator: A Study of East Coast Rail Link Project in MalaysiaDocument19 pagesThe Relationship of Total Quality Management Practices and Project Performance With Risk Management As Mediator: A Study of East Coast Rail Link Project in MalaysiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparison of JavaScript Frontend Frameworks - Angular, React, and VueDocument8 pagesComparison of JavaScript Frontend Frameworks - Angular, React, and VueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Influence of Artificial Intelligence On Employment Trends in The United States (US)Document5 pagesThe Influence of Artificial Intelligence On Employment Trends in The United States (US)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Organizational Factors That Influence Information Security in Smes: A Case Study of Mogadishu, SomaliaDocument10 pagesOrganizational Factors That Influence Information Security in Smes: A Case Study of Mogadishu, SomaliaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Disseminating The Real-World Importance of Conjunct Studies of Acculturation, Transculturation, and Deculturation Processes: Why This Can Be A Useful Technique To Analyze Real-World ObservationsDocument15 pagesDisseminating The Real-World Importance of Conjunct Studies of Acculturation, Transculturation, and Deculturation Processes: Why This Can Be A Useful Technique To Analyze Real-World ObservationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mediating Effect of Encouraging Attitude of School Principals On Personal Well-Being and Career Ethics of TeachersDocument10 pagesMediating Effect of Encouraging Attitude of School Principals On Personal Well-Being and Career Ethics of TeachersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Classifying Crop Leaf Diseases Using Different Deep Learning Models With Transfer LearningDocument8 pagesClassifying Crop Leaf Diseases Using Different Deep Learning Models With Transfer LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Total Cost of Ownership of Electric Car and Internal Combustion Engine Car With Performance NormalizationDocument11 pagesTotal Cost of Ownership of Electric Car and Internal Combustion Engine Car With Performance NormalizationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gender-Based Violence: Engaging Children in The SolutionDocument10 pagesGender-Based Violence: Engaging Children in The SolutionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Integrating Multimodal Deep Learning For Enhanced News Sentiment Analysis and Market Movement ForecastingDocument8 pagesIntegrating Multimodal Deep Learning For Enhanced News Sentiment Analysis and Market Movement ForecastingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Personality Factors As Predictors of The Level of Personality Functioning in Adolescence: Examining The Influence of Birth Order, Financial Status, and SexDocument10 pagesPersonality Factors As Predictors of The Level of Personality Functioning in Adolescence: Examining The Influence of Birth Order, Financial Status, and SexInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship Between Knowledge About Halitosis and Dental and Oral Hygiene in Patients With Fixed Orthodontics at The HK Medical Center MakassarDocument4 pagesThe Relationship Between Knowledge About Halitosis and Dental and Oral Hygiene in Patients With Fixed Orthodontics at The HK Medical Center MakassarInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Development of Creative Thinking: Case Study of Basic Design StudioDocument9 pagesDevelopment of Creative Thinking: Case Study of Basic Design StudioInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Evaluation of Causes of Visual Impairment Among Bespectacled Between The Age 18-23: A Study From Tamil Nadu, IndiaDocument3 pagesEvaluation of Causes of Visual Impairment Among Bespectacled Between The Age 18-23: A Study From Tamil Nadu, IndiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Monetary and Non-Monetary Rewards For Employees Motivation in Tanzania Public Sector: The Management PerspectivesDocument8 pagesMonetary and Non-Monetary Rewards For Employees Motivation in Tanzania Public Sector: The Management PerspectivesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Investigation Model To Combat Computer Gaming Delinquency in South Africa, Server-Based Gaming, and Illegal Online GamingDocument15 pagesAn Investigation Model To Combat Computer Gaming Delinquency in South Africa, Server-Based Gaming, and Illegal Online GamingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Comparative Analysis of Pineapples (Ananas Comosus) From Different Bioethanol Sources Available in The PhilippinesDocument39 pagesA Comparative Analysis of Pineapples (Ananas Comosus) From Different Bioethanol Sources Available in The PhilippinesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tokai Hit Nikon Catalog 2019Document12 pagesTokai Hit Nikon Catalog 2019Brandon LEeNo ratings yet
- Kotler S SoftDocument238 pagesKotler S SoftMohit LakhotiaNo ratings yet
- Saavaj: Episode 298 SC 298/1 Ajay's Room Int Day Ajay ToralDocument4 pagesSaavaj: Episode 298 SC 298/1 Ajay's Room Int Day Ajay ToraltunewingsNo ratings yet
- Blackley, Andrew (2015) - Park McArthur. Afterall - A Journal of Art, Context and EnquiryDocument14 pagesBlackley, Andrew (2015) - Park McArthur. Afterall - A Journal of Art, Context and Enquiryintern.mwicNo ratings yet
- Asso V EnergyDocument38 pagesAsso V Energyarriane joy insularNo ratings yet
- A World-Leading Valve Product Range: VelanDocument12 pagesA World-Leading Valve Product Range: Velanquocphong199No ratings yet
- ATPAR ReviewerDocument25 pagesATPAR ReviewerJohn Paul BuliyatNo ratings yet
- NHP210series 202104Document2 pagesNHP210series 202104Inovar Engineering and Consultants LLPNo ratings yet
- Notice No. 320 (B) (Regarding Online Classes)Document2 pagesNotice No. 320 (B) (Regarding Online Classes)Ayush DubeyNo ratings yet
- In-Vehicle NetworkingDocument50 pagesIn-Vehicle NetworkingMohamed ElgeziryNo ratings yet
- Discovering Computers Enhanced Edition ©2017: Introducing Today's TechnologiesDocument37 pagesDiscovering Computers Enhanced Edition ©2017: Introducing Today's TechnologiesKent PerezNo ratings yet
- Below Mentioned Is The List of Mumbai Management CollegesDocument3 pagesBelow Mentioned Is The List of Mumbai Management CollegesManish SainiNo ratings yet
- ICEfaces Asynchronous HTTP ServerDocument33 pagesICEfaces Asynchronous HTTP ServerIniyaNo ratings yet
- Account Statement SBI PDFDocument12 pagesAccount Statement SBI PDFUMESH KUMAR YadavNo ratings yet
- Lessonplans Self ProtectionDocument6 pagesLessonplans Self ProtectionteacherasyikinNo ratings yet
- Leon Battista Alberti - Sebastino Serlio - Giacomo Barozzi Da Vignola - Andrea Palladio - Philibert de L'ormeDocument32 pagesLeon Battista Alberti - Sebastino Serlio - Giacomo Barozzi Da Vignola - Andrea Palladio - Philibert de L'ormeYsabelle Marie FuentesNo ratings yet
- New English File - Elementary File 10 - Test 10Document5 pagesNew English File - Elementary File 10 - Test 10Sanja IlovaNo ratings yet
- Messianic Theology and Christian Faith - G. A. RigganDocument206 pagesMessianic Theology and Christian Faith - G. A. RigganLucianaNo ratings yet
- Dan Webb Concealment GradeDocument2 pagesDan Webb Concealment Gradeapi-565691734No ratings yet
- Formal Letters - 2020 Class X - Letter To The Editor, Complaint LetterDocument7 pagesFormal Letters - 2020 Class X - Letter To The Editor, Complaint LetterVandana RawatNo ratings yet
- Dracula and TBC CheatsheetDocument2 pagesDracula and TBC CheatsheetalicejessicapreesNo ratings yet
- Pathophysiology-Threatened MiscarriageDocument1 pagePathophysiology-Threatened MiscarriageMoses Gabriel ValledorNo ratings yet
- NSTP Barangay ProfileDocument6 pagesNSTP Barangay ProfilealbertNo ratings yet
- NCBTSDocument44 pagesNCBTSGlenn GomezNo ratings yet
- Pamagat NG Isang Thesis Sa FilipinoDocument6 pagesPamagat NG Isang Thesis Sa Filipinocdayxnzcf100% (2)
- Blood Donation Management SystemDocument55 pagesBlood Donation Management SystemMounika50% (18)
- Dance Poetry PDFDocument10 pagesDance Poetry PDFEric EllulNo ratings yet