Download as pdf or txt
You might also like
- Solution Manual For Finite Element Analysis MoaveniDocument3 pagesSolution Manual For Finite Element Analysis MoaveniLuciana Maia12% (17)
- WTOG EEO REPORT 10-1-2021 To 9-30-2022Document12 pagesWTOG EEO REPORT 10-1-2021 To 9-30-2022TatyanaNo ratings yet
- SEL-2431 DNP3 Communications Options: Application Guide AG2014-32Document10 pagesSEL-2431 DNP3 Communications Options: Application Guide AG2014-32ANDREA LILIANA BAUTISTA ACEVEDONo ratings yet
- PDF Atm Security System Using Fingerprint Project Report CompressDocument2 pagesPDF Atm Security System Using Fingerprint Project Report Compressswathi H ANo ratings yet
- Circular 20161118 Updates On Requirements Relating To Ae PracticesDocument24 pagesCircular 20161118 Updates On Requirements Relating To Ae PracticesSaravanaah VJNo ratings yet
- Updated Guidelines For Alert Level 3Document10 pagesUpdated Guidelines For Alert Level 3Paul OrilaNo ratings yet
- DLL - English 4 - Q2 - W1Document6 pagesDLL - English 4 - Q2 - W1Toto Toto100% (1)
- Ref9 - A Systematic Aproch For PDM Service Design Method and AplicDocument19 pagesRef9 - A Systematic Aproch For PDM Service Design Method and AplicMan HumanNo ratings yet
- PrintDocument34 pagesPrintKumar KeshavNo ratings yet
- Savarino 2016Document6 pagesSavarino 2016Aulia Bahtiar RahmanNo ratings yet
- CBSE Class 10 Maths Basic Sample Paper With Solutions 2020 2021Document27 pagesCBSE Class 10 Maths Basic Sample Paper With Solutions 2020 2021Shankar ji guptaNo ratings yet
- Mitchell School Board Agenda April 11Document80 pagesMitchell School Board Agenda April 11Erik KaufmanNo ratings yet
- Agron 301 TheoryDocument22 pagesAgron 301 Theoryfakhar latifNo ratings yet
- Admitcard-33 SSB, Bhopal-PCT237M000924Document2 pagesAdmitcard-33 SSB, Bhopal-PCT237M000924Naman KumarNo ratings yet
- A Class-RF Power Amplifier With A Flat-Top Transistor-Voltage WaveformDocument7 pagesA Class-RF Power Amplifier With A Flat-Top Transistor-Voltage WaveformsmarziehNo ratings yet
- E Passbook 2022 10 12 12 44 00 PMDocument14 pagesE Passbook 2022 10 12 12 44 00 PMManohar NMNo ratings yet
- JIO Recharge BillDocument1 pageJIO Recharge Billankit srivastavaNo ratings yet
- Document 1312021 53807 AM ZrAxTn7pDocument8 pagesDocument 1312021 53807 AM ZrAxTn7pGisselle RodriguezNo ratings yet
- Work Transitions After Serious Hand Injury: Current Occupational Therapy Practice in A Middle-Income CountryDocument14 pagesWork Transitions After Serious Hand Injury: Current Occupational Therapy Practice in A Middle-Income CountryNataliaNo ratings yet
- Graduate ApplicationDocument2 pagesGraduate ApplicationtalamritNo ratings yet
- LAD ReportDocument13 pagesLAD ReportNaughty VongNo ratings yet
- SachinRajani FinalReport K235Document58 pagesSachinRajani FinalReport K235Mansi RathiNo ratings yet
- Complex Engineering Problem Irrigation TheoryDocument30 pagesComplex Engineering Problem Irrigation TheoryJaeNo ratings yet
- Doh AuditDocument38 pagesDoh AuditJeremy TurleyNo ratings yet
- Indian Navy: Directorate of Manpower Planning & Recruitment Ihq Mod (Navy) Sena Bhawan, New Delhi 110011Document2 pagesIndian Navy: Directorate of Manpower Planning & Recruitment Ihq Mod (Navy) Sena Bhawan, New Delhi 110011Sahil WaliaNo ratings yet
- 5000 MCQ of Computer in English PDFDocument200 pages5000 MCQ of Computer in English PDFaman yadavNo ratings yet
- Sample PDF of STD 11th Secretarial Practice Smart Notes Book Commerce Maharashtra BoardDocument24 pagesSample PDF of STD 11th Secretarial Practice Smart Notes Book Commerce Maharashtra BoardAbhishek PanditNo ratings yet
- Amchem Products Private LimitedDocument19 pagesAmchem Products Private LimitedAtika malikNo ratings yet
- Quiz - SECC 2011-Complete-Test Lyst8605Document13 pagesQuiz - SECC 2011-Complete-Test Lyst8605RAKSHITH K SNo ratings yet
- Application Form Account Opening08012022083702Document4 pagesApplication Form Account Opening08012022083702subham kumar sahuNo ratings yet
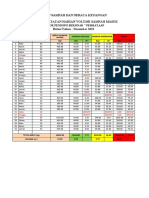
- Laporan Data Sampah Dan Keuangan KSM Pengelola Desember 2021Document8 pagesLaporan Data Sampah Dan Keuangan KSM Pengelola Desember 2021Affilda Vivian RestavinovaNo ratings yet
- 030322-Detailed English Advertisement 28Document5 pages030322-Detailed English Advertisement 28Jatin PandeNo ratings yet
- CPE400 Lab1Document9 pagesCPE400 Lab1RUEL ALEJANDRONo ratings yet
- A Study On Natural Disaster Management in IndiaDocument5 pagesA Study On Natural Disaster Management in Indiaeldho2009143No ratings yet
- Communitarianism & Civic RepublicanismDocument11 pagesCommunitarianism & Civic RepublicanismVaidehi VihariNo ratings yet
- Equipment Accounting (Accounts Assistant) : Students' Text ANT-01-003Document261 pagesEquipment Accounting (Accounts Assistant) : Students' Text ANT-01-003Royal StudiosNo ratings yet
- OpTransactionHistoryUX510 05 2023Document8 pagesOpTransactionHistoryUX510 05 2023Jagadeesh SuraNo ratings yet
- Icici Statement - 1655098848930Document26 pagesIcici Statement - 1655098848930Dharmender ChoudharyNo ratings yet
- IWAI Admit CardDocument3 pagesIWAI Admit CardManjusha MinzNo ratings yet
- F GXV 5 M4 U Sev NMVipDocument8 pagesF GXV 5 M4 U Sev NMVipParag SarodeNo ratings yet
- Cadets Manual-NCC Digital Forum-1Document6 pagesCadets Manual-NCC Digital Forum-1Aman100% (2)
- BYKPT2196M 14 09 2022 09 - 53 - 05 - UnDocument52 pagesBYKPT2196M 14 09 2022 09 - 53 - 05 - UnHani AjmalNo ratings yet
- Cure MasterDocument64 pagesCure MasterSerkan Akşanlı100% (1)
- Activa Insurance20Document3 pagesActiva Insurance20Swatantra SinghNo ratings yet
- Basic Network - Server KhmerDocument214 pagesBasic Network - Server KhmerBut DalinNo ratings yet
- Itbp Head Constable Admit CardDocument3 pagesItbp Head Constable Admit Cardmanish kushwahNo ratings yet
- Abstract and Semicontractive DP: Stable Optimal Control: Dimitri P. BertsekasDocument26 pagesAbstract and Semicontractive DP: Stable Optimal Control: Dimitri P. BertsekasMornig A DarkNo ratings yet
- Ece - VR20 29082022 2Document125 pagesEce - VR20 29082022 2Praveen Naidu VNo ratings yet
- Account Statement From 1 Jan 2021 To 31 Dec 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument8 pagesAccount Statement From 1 Jan 2021 To 31 Dec 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceYaswanth AlisettyNo ratings yet
- Music Genre Classification For Indian MuDocument9 pagesMusic Genre Classification For Indian MuKakasdNo ratings yet
- Call Up Letter Nda 144 Army Navy Na-106 Jul 2020Document15 pagesCall Up Letter Nda 144 Army Navy Na-106 Jul 2020Priya VermaNo ratings yet
- 12th Biology EngMed QueBank MSCERTDocument48 pages12th Biology EngMed QueBank MSCERTPratik PandeyNo ratings yet
- Business Partner B2Plus Ex Class Practice WorkSheet - U4Document5 pagesBusiness Partner B2Plus Ex Class Practice WorkSheet - U4Mộc LanNo ratings yet
- Risk Management and Behavioral Finance: Financial Markets, Institutions and Risks, Volume 2, Issue 2, 2018Document17 pagesRisk Management and Behavioral Finance: Financial Markets, Institutions and Risks, Volume 2, Issue 2, 2018Rabaa DooriiNo ratings yet
- CeramTec GMBH v. CoorsTek Bioceramics LLC - Notice of AppealDocument113 pagesCeramTec GMBH v. CoorsTek Bioceramics LLC - Notice of AppealSarah BursteinNo ratings yet
- Kompozimi I Kongresit Të PPEDocument2 pagesKompozimi I Kongresit Të PPENewsbomb AlbaniaNo ratings yet
- 63b3033d-a734-4f0d-9f44-11651425564eDocument4 pages63b3033d-a734-4f0d-9f44-11651425564eRenuka DigheNo ratings yet
- GMR Enterprises Private Limited: Yogindu KhajuriaDocument3 pagesGMR Enterprises Private Limited: Yogindu KhajuriaJohn SmithNo ratings yet
- Address and E-Mail ID's of Ward Assistant Commissioner & CFC (Modified File)Document2 pagesAddress and E-Mail ID's of Ward Assistant Commissioner & CFC (Modified File)ankitNo ratings yet
- Lecture 1-Introduction-AE 308 - AE 775-2021-AMDocument34 pagesLecture 1-Introduction-AE 308 - AE 775-2021-AMsakshiNo ratings yet
- DMS Chapter2 Part1Document24 pagesDMS Chapter2 Part1aman muleNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument32 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument31 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument31 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument29 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument28 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument29 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument22 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument24 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Lecture 21 Lead Lag Compensator Design-2021-AE 308 AE 775-AMDocument54 pagesLecture 21 Lead Lag Compensator Design-2021-AE 308 AE 775-AMsakshiNo ratings yet
- Lecture 20 PD PID Control Designs-2021-AE 308 AE 775-AMDocument57 pagesLecture 20 PD PID Control Designs-2021-AE 308 AE 775-AMsakshiNo ratings yet
- Lecture 1-Introduction-AE 308 - AE 775-2021-AMDocument34 pagesLecture 1-Introduction-AE 308 - AE 775-2021-AMsakshiNo ratings yet
- Mo QP 118 Indian AbacusDocument7 pagesMo QP 118 Indian AbacusIndian Abacus0% (1)
- Alan Mellor - Test-Driven Development With Java - Create Higher-Quality Software by Writing Tests First With SOLID and Hexagonal Architecture (2023, Packt Publishing) - Libgen - LiDocument348 pagesAlan Mellor - Test-Driven Development With Java - Create Higher-Quality Software by Writing Tests First With SOLID and Hexagonal Architecture (2023, Packt Publishing) - Libgen - LiGabriel MartinelliNo ratings yet
- ARM Cortex Portfolio 2114Document5 pagesARM Cortex Portfolio 2114Raja NaiduNo ratings yet
- Motion Planning For The Two-Phase Stefan Problem in Level Set FormulationDocument183 pagesMotion Planning For The Two-Phase Stefan Problem in Level Set FormulationLucas SantosNo ratings yet
- Operational Amplifier (Phe-10)Document50 pagesOperational Amplifier (Phe-10)abhinavthedhimanNo ratings yet
- Notes Lower Form 2023Document93 pagesNotes Lower Form 2023NORIDAH BINTI RAHMAT MoeNo ratings yet
- Adminbalitbangda,+4 +Artikel+Budi+TeguhDocument16 pagesAdminbalitbangda,+4 +Artikel+Budi+Teguhhenie inamortaNo ratings yet
- 2 X 30 MW Boiler For DPL (Unit 1 & 2) PpilDocument2 pages2 X 30 MW Boiler For DPL (Unit 1 & 2) PpillightsonsNo ratings yet
- Unit Four Homework Solutions, September 23. 2010: Mechanical Engineering 370 ThermodynamicsDocument3 pagesUnit Four Homework Solutions, September 23. 2010: Mechanical Engineering 370 ThermodynamicsRengganis Putri ParmudyaNo ratings yet
- JS85 1Document6 pagesJS85 1Anangtri Wahyudi100% (1)
- Validation Based ProtocolDocument7 pagesValidation Based ProtocolTerimaaNo ratings yet
- Eddy Current in BriefDocument23 pagesEddy Current in BriefRamakrishnan AmbiSubbiahNo ratings yet
- 2019 Python Projects ListDocument5 pages2019 Python Projects ListgestNo ratings yet
- Excel Ninja TrackerDocument5 pagesExcel Ninja Trackeranandbajaj0No ratings yet
- Pre-Calculus Worksheet 1Document4 pagesPre-Calculus Worksheet 1Rogelio Jr. TapiaNo ratings yet
- 4Q W1 WORKSHEET With ANSWER KEYSDocument2 pages4Q W1 WORKSHEET With ANSWER KEYSjia aganaNo ratings yet
- Identifying Salts LabDocument14 pagesIdentifying Salts LabSantiago Macías100% (1)
- Nutanix Collector User Guide v4 - 0Document48 pagesNutanix Collector User Guide v4 - 0Clement EbereNo ratings yet
- Can Protocol Uvm PDFDocument5 pagesCan Protocol Uvm PDFMayank JaiswalNo ratings yet
- An Overview of Measures To Adapt Coal-Fired Power Plants To Flexible OperationDocument60 pagesAn Overview of Measures To Adapt Coal-Fired Power Plants To Flexible OperationThanasate PrasongsookNo ratings yet
- Controlling Process of A Bottling Plant Using PLC andDocument6 pagesControlling Process of A Bottling Plant Using PLC andrahmanandaNo ratings yet
- Transient Distortion in Transistorized Power Amplifiers: AudioDocument6 pagesTransient Distortion in Transistorized Power Amplifiers: Audiogiordanobi859641No ratings yet
- Business Portal Online Print 10-11-2020Document283 pagesBusiness Portal Online Print 10-11-2020sxturbo100% (1)
- Nortec Eddy CurrentDocument40 pagesNortec Eddy CurrentCss Sfaxien100% (2)
- Auto Tuning PID Controller Based On Improved Genetic Algorithm For Reverse Osmosis PlantDocument6 pagesAuto Tuning PID Controller Based On Improved Genetic Algorithm For Reverse Osmosis PlantDragon_MoonNo ratings yet
- Combined Footings 06Document6 pagesCombined Footings 06Ahsan SattarNo ratings yet
- BS en 1926:2006Document20 pagesBS en 1926:2006lkzasj dksikNo ratings yet
- BBS - 1-22-0 CulvertDocument2 pagesBBS - 1-22-0 Culvertshakti panda0% (1)
- The FVA - Forward Volatility AgreementDocument9 pagesThe FVA - Forward Volatility Agreementshih_kaichih100% (1)