Download as pdf or txt
You might also like
- Service Training: Electric Stacking Trucks L10 / L12 - Type 379 Controller L.D.C. (As of 09/98)Document106 pagesService Training: Electric Stacking Trucks L10 / L12 - Type 379 Controller L.D.C. (As of 09/98)Abdel Vetah100% (3)
- JMC EC Series User ManualDocument483 pagesJMC EC Series User ManualNicolas Molina75% (4)
- CG-SR SL Maintenance Manual Ver1.10Document140 pagesCG-SR SL Maintenance Manual Ver1.10Jose CardosoNo ratings yet
- EN 1372 765 101a 2017 02 OnlineDocument204 pagesEN 1372 765 101a 2017 02 Onlineemilio Alons100% (12)
- YD101 UsermanualDocument97 pagesYD101 UsermanualReymar S. Banaag100% (2)
- BB2000 - 9133522 - GB - Service ManualDocument66 pagesBB2000 - 9133522 - GB - Service ManualВиктор Объедков100% (3)
- Vatsa - Vatsa (2009) - Discrete Mathematics, 4th Edition PDFDocument315 pagesVatsa - Vatsa (2009) - Discrete Mathematics, 4th Edition PDFMultimediostv En directo80% (5)
- Final - District Cooling System Design MENA - July2021Document220 pagesFinal - District Cooling System Design MENA - July2021Mubashir KhanNo ratings yet
- General Electric SX Z1-2 (Ingles 01-1999) PDFDocument74 pagesGeneral Electric SX Z1-2 (Ingles 01-1999) PDFJuan Carlos Rubio FrescoNo ratings yet
- DX1 Tech PDFDocument68 pagesDX1 Tech PDFCorjuc StefanNo ratings yet
- Controlador LX General Electric PDFDocument69 pagesControlador LX General Electric PDFMario Aguirre100% (2)
- ro_me_02_33_01_enDocument17 pagesro_me_02_33_01_enCaio DinizNo ratings yet
- OKIPOS425D manual tecnicoDocument138 pagesOKIPOS425D manual tecnicobicibrittoNo ratings yet
- Layout BaseDocument31 pagesLayout Baseanssr.hseaNo ratings yet
- Ge R3R404P2 P3Document62 pagesGe R3R404P2 P3Pablo FriasNo ratings yet
- sbm2 DC Achse 7 8 enDocument27 pagessbm2 DC Achse 7 8 enDenisNo ratings yet
- Elite Manual de ServiçoDocument196 pagesElite Manual de ServiçoCarlos Flores100% (1)
- Kuka KR C1 Hardware Release 2.2Document73 pagesKuka KR C1 Hardware Release 2.2Rafael100% (2)
- NC4 Tech PDFDocument81 pagesNC4 Tech PDF0101 HanafiNo ratings yet
- Advant® OCS With Master Software User's GuideDocument74 pagesAdvant® OCS With Master Software User's GuideSuvendra Dev DasNo ratings yet
- 1 - Manual NA003 M64 Version 01.11.01C - enDocument115 pages1 - Manual NA003 M64 Version 01.11.01C - enelektrocentarNo ratings yet
- Plz - 303w 매뉴얼Document196 pagesPlz - 303w 매뉴얼이훈희No ratings yet
- SCCBapplicationspecification PDFDocument22 pagesSCCBapplicationspecification PDFpolikarpaNo ratings yet
- 379_L10-L12_EN_0305Document6 pages379_L10-L12_EN_0305Dudu SoaresNo ratings yet
- C5400/C5200/C5150/ C3100 Color LED Page Printer: Maintenance ManualDocument141 pagesC5400/C5200/C5150/ C3100 Color LED Page Printer: Maintenance ManualTomislav BelosevicNo ratings yet
- Tle8102Sg: Smart Dual Channel Powertrain Switch CoreflexDocument34 pagesTle8102Sg: Smart Dual Channel Powertrain Switch CoreflexMiguel Angel de la Cruz de la CruzNo ratings yet
- 19 3bhs539410-612 Minlib LcbtypeDocument36 pages19 3bhs539410-612 Minlib LcbtypeManuel Alejandro Retamales GuzmánNo ratings yet
- VZ7000 Converter Instruction Manual: Common For 200V/400V ConvertersDocument44 pagesVZ7000 Converter Instruction Manual: Common For 200V/400V Converterstt cheneyNo ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualTahar BenacherineNo ratings yet
- WEG CFW300 Programming Manual 10007849716 enDocument176 pagesWEG CFW300 Programming Manual 10007849716 enMartinParotNo ratings yet
- Villa RotographDocument302 pagesVilla RotographJiggsNo ratings yet
- TLE5012B: 1 FeaturesDocument51 pagesTLE5012B: 1 FeaturesAbdi PrasetyoNo ratings yet
- 104 Servomotor Se BoschDocument76 pages104 Servomotor Se BoschelektronNo ratings yet
- C9000 Series Color LED Page Printer: Maintenance ManualDocument157 pagesC9000 Series Color LED Page Printer: Maintenance ManualToma KuckovNo ratings yet
- 8 Bit Microcontroller: TLCS-870/C SeriesDocument160 pages8 Bit Microcontroller: TLCS-870/C SeriesСергей СтаниславскийNo ratings yet
- An2586 Getting Started With Stm32f10xxx Hardware Development StmicroelectronicsDocument29 pagesAn2586 Getting Started With Stm32f10xxx Hardware Development StmicroelectronicsGERMANNo ratings yet
- Infineon Infineon TLE8080EM DS v01 02 enDocument38 pagesInfineon Infineon TLE8080EM DS v01 02 enYael AlcaNo ratings yet
- Infineon TLE7259 2GE DS v01 - 50 ENDocument30 pagesInfineon TLE7259 2GE DS v01 - 50 ENdinexsismartinezNo ratings yet
- Lofa El240 User Manual enDocument23 pagesLofa El240 User Manual enhueyceNo ratings yet
- Rev2 Service Manual Apollo PDFDocument370 pagesRev2 Service Manual Apollo PDFJordi Vaquero RamirezNo ratings yet
- DC-DC Step-Down FelixDocument31 pagesDC-DC Step-Down FelixGFGHJHKNo ratings yet
- Bus Differential System: Grid SolutionsDocument668 pagesBus Differential System: Grid SolutionsJose Antonio Ramirez CampanaNo ratings yet
- MRP2 - Directional Power RelayDocument36 pagesMRP2 - Directional Power RelayBenigno Sayaboc TaradelNo ratings yet
- Harmonic HLT7706 R ManualDocument62 pagesHarmonic HLT7706 R ManualMike Rice100% (1)
- Medidor de FlujoDocument197 pagesMedidor de FlujoMauro Ospina HoyosNo ratings yet
- SM RCCT-3Document86 pagesSM RCCT-3Suvitchat8574No ratings yet
- Service Manual: Color Video CameraDocument63 pagesService Manual: Color Video Cameraaurumstar2000100% (1)
- Infineon TLE9104SH DataSheet v01 - 31 ENDocument35 pagesInfineon TLE9104SH DataSheet v01 - 31 ENMohamed AbdulmaksoudNo ratings yet
- CL1 Tech PDFDocument74 pagesCL1 Tech PDFIqbal MakhdoomNo ratings yet
- Siremobil Iso-C: © Si e M e Ns AG 1 9 9 8Document50 pagesSiremobil Iso-C: © Si e M e Ns AG 1 9 9 8Eduardo Saul MendozaNo ratings yet
- Kemppi Fastmig M Om enDocument16 pagesKemppi Fastmig M Om enThe guyNo ratings yet
- Separately Excited (SX) Transistorized Motor Controllers For Neighborhood Electric Vehicle Application Installation and Operation ManualDocument39 pagesSeparately Excited (SX) Transistorized Motor Controllers For Neighborhood Electric Vehicle Application Installation and Operation ManualMamadou djibril BaNo ratings yet
- OKIPAGE 14e Service Manual 2Document182 pagesOKIPAGE 14e Service Manual 2sandra_white_11No ratings yet
- Adjustment Instructions: RobotDocument21 pagesAdjustment Instructions: RobotNicolas MolinaNo ratings yet
- GE R4W746N5 P4U450N10 Control Traccion Montacargas 1Document69 pagesGE R4W746N5 P4U450N10 Control Traccion Montacargas 1Jorge CastilloNo ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualBruno BayardNo ratings yet
- Im01e20d01-01e Maintenance and Installation Troubleshooting For Admag FlowmeterDocument128 pagesIm01e20d01-01e Maintenance and Installation Troubleshooting For Admag FlowmeterEdwin MercadoNo ratings yet
- Addressable Downhole Release Tool: Sondex Wireline LimitedDocument112 pagesAddressable Downhole Release Tool: Sondex Wireline LimitedStanislav KachemaevNo ratings yet
- ARC Welding Application - E1102000124GB01Document116 pagesARC Welding Application - E1102000124GB01IsmaelNo ratings yet
- SMT 06 R&SDocument462 pagesSMT 06 R&Spaquirri999No ratings yet
- TLE7183FDocument28 pagesTLE7183FCartronic OkNo ratings yet
- Rotograph Evo 3dDocument290 pagesRotograph Evo 3dشادي العمرNo ratings yet
- Next Generation SDH/SONET: Evolution or Revolution?From EverandNext Generation SDH/SONET: Evolution or Revolution?Rating: 2.5 out of 5 stars2.5/5 (2)
- SJJ Series Compulsive Extrusion MixerDocument4 pagesSJJ Series Compulsive Extrusion MixerNicolas MolinaNo ratings yet
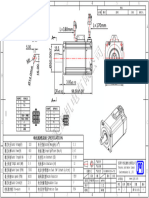
- 60jasm504230k 17BCDocument1 page60jasm504230k 17BCNicolas MolinaNo ratings yet
- Adjustment Instructions: RobotDocument21 pagesAdjustment Instructions: RobotNicolas MolinaNo ratings yet
- TVDA Device Module Library: Function Template Library GuideDocument261 pagesTVDA Device Module Library: Function Template Library GuideNicolas MolinaNo ratings yet
- WPC Aco PDFDocument16 pagesWPC Aco PDFpetar spalevicNo ratings yet
- The National Service Training Program Its Legal Basis, Objectives and SignificanceDocument13 pagesThe National Service Training Program Its Legal Basis, Objectives and SignificanceAngela Danielle TanNo ratings yet
- PDF DPWH Cost Estimation Manual For Low Rise Buildings DLDocument260 pagesPDF DPWH Cost Estimation Manual For Low Rise Buildings DLMichael Angelo Ballon100% (1)
- Research Article: Three-Dimensional CST Parameterization Method Applied in Aircraft Aeroelastic AnalysisDocument16 pagesResearch Article: Three-Dimensional CST Parameterization Method Applied in Aircraft Aeroelastic AnalysisSohail AhmedNo ratings yet
- Diagnostic ExampleDocument17 pagesDiagnostic Exampleapi-296055206No ratings yet
- Astm C143Document4 pagesAstm C143Audrey Schwartz100% (2)
- The 7 Habits of Highly Effective People Covey en 3515Document5 pagesThe 7 Habits of Highly Effective People Covey en 3515tania_986550485100% (1)
- Anatomy and Histology of The Cardiovascular SystemDocument16 pagesAnatomy and Histology of The Cardiovascular SystemTasmiah HossainNo ratings yet
- ArcGIS For JavaScript Developers by Example - Sample ChapterDocument37 pagesArcGIS For JavaScript Developers by Example - Sample ChapterPackt PublishingNo ratings yet
- Data Stock Nutrimart 05-04-2023Document8 pagesData Stock Nutrimart 05-04-2023aqmalwiragunaNo ratings yet
- Case Study On Maruthi Sujuki India LTD Employees StrikeDocument5 pagesCase Study On Maruthi Sujuki India LTD Employees StrikeDiya JagtapNo ratings yet
- Experience Gokul BoopathiDocument4 pagesExperience Gokul BoopathiKeerthi VarshiniNo ratings yet
- Cambridge International AS & A Level: Computer Science 9618/32Document12 pagesCambridge International AS & A Level: Computer Science 9618/32davieNo ratings yet
- Interview Nadeem Haque EvolutionDocument7 pagesInterview Nadeem Haque Evolutionhaque_nadeem1188No ratings yet
- Alcohols Ncert SolutionDocument35 pagesAlcohols Ncert SolutionJewelNo ratings yet
- Inaccuracies in Manometric Central Venous Pressure MeasurementDocument10 pagesInaccuracies in Manometric Central Venous Pressure MeasurementmfhfhfNo ratings yet
- Laya Marxlenin - CE152P-2 - E02 - Experiment2 - Module1Document5 pagesLaya Marxlenin - CE152P-2 - E02 - Experiment2 - Module1Marxlenin LayaNo ratings yet
- TM2815-34P-4B 6.2L EngineDocument133 pagesTM2815-34P-4B 6.2L EngineTorqueNo ratings yet
- 4TH Summative Test Q2Document22 pages4TH Summative Test Q2Joehan DimaanoNo ratings yet
- Janine Flying Sprints Testing (Information Sheet and Consent Form)Document5 pagesJanine Flying Sprints Testing (Information Sheet and Consent Form)adamNo ratings yet
- Identity As A Service For DummiesDocument53 pagesIdentity As A Service For DummiesDevendra GuptaNo ratings yet
- Kondensasi Aldol Silang PDFDocument7 pagesKondensasi Aldol Silang PDFRiska Elya VenilitaNo ratings yet
- Code Switching and Code MixingDocument2 pagesCode Switching and Code MixingAtif HaiderNo ratings yet
- Fascinating Facts Earth Science WorkbookDocument40 pagesFascinating Facts Earth Science Workbookbuzuleacnadya100% (3)
- Art NouveauDocument73 pagesArt NouveauRuqayya AhmedNo ratings yet
- CMS Farming SystemDocument3 pagesCMS Farming SystemCarylSaycoNo ratings yet
- Packard Bell Sjm50Mv/Pu Service GuideDocument180 pagesPackard Bell Sjm50Mv/Pu Service Guideg321m46No ratings yet
- LESSON PLAN Unit - 4 - at - HomeDocument8 pagesLESSON PLAN Unit - 4 - at - HomeKOSMASNo ratings yet