Download as pdf or txt
You might also like
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Love Stories of Shimla Hills - Chaudhry, MinakshiDocument251 pagesLove Stories of Shimla Hills - Chaudhry, MinakshiAnkit BhattNo ratings yet
- The Expanding Role of PM Machines in Direct-DriveDocument6 pagesThe Expanding Role of PM Machines in Direct-Driverakeshee2007No ratings yet
- Permanent Magnet Synchronous MachineDocument8 pagesPermanent Magnet Synchronous MachineWilli Apupalo NaranjoNo ratings yet
- Flux Switching Machines A Review On Design and App 221201 004857Document7 pagesFlux Switching Machines A Review On Design and App 221201 004857Rana AtharNo ratings yet
- A New Brushless Wound Rotor Synchronous Machine Using A Special Stator Winding ArrangementDocument8 pagesA New Brushless Wound Rotor Synchronous Machine Using A Special Stator Winding Arrangementrazarafiq033No ratings yet
- Ice Cube 2021 Paper 39Document5 pagesIce Cube 2021 Paper 39fazianNo ratings yet
- Magnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching MachineDocument8 pagesMagnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching Machineihab benayacheNo ratings yet
- Paper 4 PDFDocument5 pagesPaper 4 PDFAsif HussainNo ratings yet
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainNo ratings yet
- e-Publications@Marquette e-Publications@MarquetteDocument29 pagese-Publications@Marquette e-Publications@MarquetteAmeerkhanNo ratings yet
- Analysis of A Dual-Rotor, Toroidal-Winding, Axial-Flux Vernier Permanent Magnet MachineDocument10 pagesAnalysis of A Dual-Rotor, Toroidal-Winding, Axial-Flux Vernier Permanent Magnet MachinekfaliNo ratings yet
- Power-Model-Based Adaptive Overmodulation Scheme For Field-Weakening Control of PMSMDocument12 pagesPower-Model-Based Adaptive Overmodulation Scheme For Field-Weakening Control of PMSMeankuetNo ratings yet
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainNo ratings yet
- Modeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveDocument9 pagesModeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveArthur CaiNo ratings yet
- Design and Analysis of A New Outer RotorDocument8 pagesDesign and Analysis of A New Outer RotorRana AtharNo ratings yet
- Performance Comparison Between Switching-Flux and Ipm Machines With Rare-Earth and Ferrite PmsDocument9 pagesPerformance Comparison Between Switching-Flux and Ipm Machines With Rare-Earth and Ferrite PmsomokhafeNo ratings yet
- Yesilbag 2014Document6 pagesYesilbag 2014Zack RamadhanNo ratings yet
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiNo ratings yet
- Novel Flux Linkage Estimation Algorithm For A Variable Flux PMSMDocument17 pagesNovel Flux Linkage Estimation Algorithm For A Variable Flux PMSMViệt Anh PhạmNo ratings yet
- Analysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC GeneratorDocument11 pagesAnalysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC Generatorlinnan sunNo ratings yet
- Application Characteristics of Permanent Magnet Synchronous Motors (Case Study)Document6 pagesApplication Characteristics of Permanent Magnet Synchronous Motors (Case Study)RakeshconclaveNo ratings yet
- Review of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy ApplicationsDocument21 pagesReview of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy Applicationsh.nagarjaNo ratings yet
- Permanent Magnet Vernier Machine: A Review: Fan Wu, Ayman M. El-RefaieDocument11 pagesPermanent Magnet Vernier Machine: A Review: Fan Wu, Ayman M. El-RefaieAmeerkhanNo ratings yet
- Pulsating Torque Minimization Techniques For Permanent Magnet AC Motor Drives - A ReviewDocument10 pagesPulsating Torque Minimization Techniques For Permanent Magnet AC Motor Drives - A ReviewIan SilveiraNo ratings yet
- Vector Control of Permanent Magnet Synchronous MotorDocument51 pagesVector Control of Permanent Magnet Synchronous MotorFAIZAN ALINo ratings yet
- Sensors 20 02406 v2Document11 pagesSensors 20 02406 v2Krishna KumarNo ratings yet
- Multiphase Electric Machines For Variable Speed Appl PDFDocument17 pagesMultiphase Electric Machines For Variable Speed Appl PDFDrYs Kishore Babu0% (1)
- Design and Analysis of A Novel Brushless Wound Rotor Synchronous MachineDocument4 pagesDesign and Analysis of A Novel Brushless Wound Rotor Synchronous MachineHuong ThaoNo ratings yet
- Comparative Study of Torque Production in Conventional and Mutually Coupled Srms Using Frozen PermeabilityDocument9 pagesComparative Study of Torque Production in Conventional and Mutually Coupled Srms Using Frozen Permeabilitytarcioandre1No ratings yet
- Hybrid Excited Permanent Magnet Machines For Electric and Hybrid Electric Vehicles PDFDocument15 pagesHybrid Excited Permanent Magnet Machines For Electric and Hybrid Electric Vehicles PDFtejas9280No ratings yet
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193No ratings yet
- A Novel Interior Permanent Magnet Machine With MagDocument9 pagesA Novel Interior Permanent Magnet Machine With MagKanokkorn SingraengNo ratings yet
- A17. Six-Phase Fractional-Slot-per-Pole-per-Phase Permanent-Magnet Machines With Low Space Harmonics For Electric Vehicle ApplicationDocument10 pagesA17. Six-Phase Fractional-Slot-per-Pole-per-Phase Permanent-Magnet Machines With Low Space Harmonics For Electric Vehicle Applicationwalidghoneim1970No ratings yet
- Design Procedure of A Line-Start Permanent Magnet Synchronous MachineDocument9 pagesDesign Procedure of A Line-Start Permanent Magnet Synchronous MachineQuang HoàngNo ratings yet
- Design and Comparative Performance Analysis of Inner Rotor and Inner Stator Axial Flux Permanent Magnet Synchronous Generator For Wind Turbine ApplicationsDocument7 pagesDesign and Comparative Performance Analysis of Inner Rotor and Inner Stator Axial Flux Permanent Magnet Synchronous Generator For Wind Turbine ApplicationsfilimonNo ratings yet
- Module-4 - PM and BLDC DrivesDocument8 pagesModule-4 - PM and BLDC DrivesGaurang BuchNo ratings yet
- Development of A Prime Mover Emulator Using A Permanent-Magnet Synchronous Motor DriveDocument12 pagesDevelopment of A Prime Mover Emulator Using A Permanent-Magnet Synchronous Motor DrivePablo LopezNo ratings yet
- Energies 15 07607 v2Document21 pagesEnergies 15 07607 v2Hailin HuangNo ratings yet
- A Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque PerformanceDocument4 pagesA Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque Performancejunaid ikramNo ratings yet
- Mathematics 10 03364Document16 pagesMathematics 10 03364Ahmad AbugoushNo ratings yet
- Multiphase Electric Machines For Variable-Speed ApplicationsDocument17 pagesMultiphase Electric Machines For Variable-Speed ApplicationsSHUBHAM DABRALNo ratings yet
- 09-Brushless Operation of Wound-Rotor Synchronous Machine Based On Sub-Harmonic Excitation Technique Using Multi-Pole Stator WindingsDocument16 pages09-Brushless Operation of Wound-Rotor Synchronous Machine Based On Sub-Harmonic Excitation Technique Using Multi-Pole Stator WindingsMuhammad HumzaNo ratings yet
- Analysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM DrivesDocument8 pagesAnalysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM Drives22dr0302No ratings yet
- Energies 15 05501 PDFDocument15 pagesEnergies 15 05501 PDFKev NgoNo ratings yet
- The Expanding Role of PM Machines in Direct-Drive PDFDocument6 pagesThe Expanding Role of PM Machines in Direct-Drive PDFrakeshee2007No ratings yet
- Design and Optimization of Outer-Rotor Permanent Magnet Fluxswitching Motor Using Transverse Segmental Rotor Shapefor Automotive ApplicationsDocument10 pagesDesign and Optimization of Outer-Rotor Permanent Magnet Fluxswitching Motor Using Transverse Segmental Rotor Shapefor Automotive ApplicationsGeorge LazarNo ratings yet
- Optimal Flux Weakening in Surface PM Machines UsinDocument12 pagesOptimal Flux Weakening in Surface PM Machines UsinakhilnandanNo ratings yet
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiNo ratings yet
- A Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Document8 pagesA Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Ali H. NumanNo ratings yet
- Design and Testing of Flux Switched Permanent Magnet (FSPM) MachinesDocument27 pagesDesign and Testing of Flux Switched Permanent Magnet (FSPM) MachinesjalilemadiNo ratings yet
- 00 SRM Drives Alternative e TractionDocument4 pages00 SRM Drives Alternative e TractionSung Ryoung LimNo ratings yet
- Modeling of PMSMDocument28 pagesModeling of PMSMMd QutubuddinNo ratings yet
- Capacitive Power Transfer For Rotor Field Current in Synchronous MachinesDocument8 pagesCapacitive Power Transfer For Rotor Field Current in Synchronous MachinesHuong ThaoNo ratings yet
- Modelling and Analysis of Permanent Magnet VernierDocument11 pagesModelling and Analysis of Permanent Magnet Vernierihab benayacheNo ratings yet
- HF 1 Zaim2014Document11 pagesHF 1 Zaim2014Duy TínhNo ratings yet
- DD Comp20 Fault-Tolerant Operation of A Novel Dual-Channel Switched Reluctance Motor Using Two 3-Phase Standard InvertersDocument5 pagesDD Comp20 Fault-Tolerant Operation of A Novel Dual-Channel Switched Reluctance Motor Using Two 3-Phase Standard InvertersAhmet Can YULAFNo ratings yet
- 53e9aeabb7602d97038d1360 0Document13 pages53e9aeabb7602d97038d1360 0Sung Ryoung LimNo ratings yet
- Rotordynamic Analysis of The AM600 Turbine-Generator ShaftlineDocument20 pagesRotordynamic Analysis of The AM600 Turbine-Generator ShaftlineJarot PrakosoNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- EnergiesDocument15 pagesEnergiesAsif HussainNo ratings yet
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainNo ratings yet
- Engineering of Metallic Nanorod Based Hyperbolic Metamaterials For Broadband Applications Operating in The Infrared RegimeDocument12 pagesEngineering of Metallic Nanorod Based Hyperbolic Metamaterials For Broadband Applications Operating in The Infrared RegimeAsif HussainNo ratings yet
- Principles of Electrical Machine Design and Materials For Electric MachinesDocument14 pagesPrinciples of Electrical Machine Design and Materials For Electric MachinesAsif HussainNo ratings yet
- Introduction of Electric MachinesDocument12 pagesIntroduction of Electric MachinesAsif HussainNo ratings yet
- TPWRD.2013.2269142 Traffic-Constrained Multiobjective Planning EV Charging StationsDocument10 pagesTPWRD.2013.2269142 Traffic-Constrained Multiobjective Planning EV Charging StationsAsif HussainNo ratings yet
- University of Management & Technology (Fall 2018) : Do Not Open This Exam Until Told To Do SoDocument3 pagesUniversity of Management & Technology (Fall 2018) : Do Not Open This Exam Until Told To Do SoAsif HussainNo ratings yet
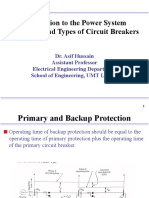
- Introduction To The Power System ProtectionDocument48 pagesIntroduction To The Power System ProtectionAsif HussainNo ratings yet
- Review Article Challenges and Gaps For Energy Planning Models in The Developing-World ContextDocument13 pagesReview Article Challenges and Gaps For Energy Planning Models in The Developing-World ContextAsif HussainNo ratings yet
- Lecture 4 PDFDocument19 pagesLecture 4 PDFAsif HussainNo ratings yet
- Lecture 5Document11 pagesLecture 5Asif HussainNo ratings yet
- Introduction To The Power System Protection and Types of Circuit BreakersDocument7 pagesIntroduction To The Power System Protection and Types of Circuit BreakersAsif HussainNo ratings yet
- Paper 4 PDFDocument5 pagesPaper 4 PDFAsif HussainNo ratings yet
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainNo ratings yet
- Putting Words TogetherDocument28 pagesPutting Words TogetherKatherinaNo ratings yet
- Lesson 4 - Visual Art and Its PurposeDocument6 pagesLesson 4 - Visual Art and Its PurposeMae CherryNo ratings yet
- Notes Receivable and Loan ReceivableDocument21 pagesNotes Receivable and Loan ReceivableLady BelleNo ratings yet
- Caltex Vs PalomarDocument1 pageCaltex Vs PalomarDean Ben100% (2)
- Answer:: Free Exam/Cram Practice Materials - Best Exam Practice MaterialsDocument3 pagesAnswer:: Free Exam/Cram Practice Materials - Best Exam Practice MaterialsAmine BoubakeurNo ratings yet
- Production Planning - 095252Document13 pagesProduction Planning - 095252Jocidelle LubricoNo ratings yet
- Lesson 4 PtgsDocument46 pagesLesson 4 Ptgsnami chanNo ratings yet
- Basic Rate AnalysisDocument33 pagesBasic Rate AnalysisSudip GhimireNo ratings yet
- SUMMATIVE TEST 1 (Quarter 3 Science 7) A4 SIZEDocument6 pagesSUMMATIVE TEST 1 (Quarter 3 Science 7) A4 SIZEZayn Daniel World of GamesNo ratings yet
- DS2 - Unit 2-DC MachinesDocument57 pagesDS2 - Unit 2-DC MachinesTommba TommyNo ratings yet
- AC Traction ManualDocument162 pagesAC Traction ManualBiju MenonNo ratings yet
- Climate Variability and Climate Change 2016Document91 pagesClimate Variability and Climate Change 2016Laila Guarin100% (1)
- Pe Lesson Plan 2 16 17Document7 pagesPe Lesson Plan 2 16 17api-350775200No ratings yet
- Employee Turnover & It's Impact On Apparel Industry in Bangladesh: A Case Study of Mondol GroupDocument6 pagesEmployee Turnover & It's Impact On Apparel Industry in Bangladesh: A Case Study of Mondol GroupChristiady PurbaNo ratings yet
- Start-Up Report Warranty Registration - EDITABLEDocument1 pageStart-Up Report Warranty Registration - EDITABLESAED ALAWNEHNo ratings yet
- CALR - SUPPL X Sequenze PrimersDocument53 pagesCALR - SUPPL X Sequenze PrimersNicoletta ColomboNo ratings yet
- First Quarter Exam in English 9 2019 2020Document4 pagesFirst Quarter Exam in English 9 2019 2020Maria Carmela Rachel GazilNo ratings yet
- Review Exercises DAY 3Document4 pagesReview Exercises DAY 3Heba Abd-AllahNo ratings yet
- 2011-10-07 - Hand Out - Ithaca - Harm. of Interpr. en 15512Document19 pages2011-10-07 - Hand Out - Ithaca - Harm. of Interpr. en 15512alfonxxlNo ratings yet
- GSK 218M CNC System Connection and PLC ManualDocument192 pagesGSK 218M CNC System Connection and PLC ManualsunhuynhNo ratings yet
- 01 DTMDocument2 pages01 DTMMauro BorgesNo ratings yet
- Cicol NT Slurry: Constructive SolutionsDocument3 pagesCicol NT Slurry: Constructive SolutionstalatzahoorNo ratings yet
- SCS Method PDFDocument55 pagesSCS Method PDFWesley BridgemohansinghNo ratings yet
- Treasure Trove Workbook Answers Daffodils: Passage-1Document4 pagesTreasure Trove Workbook Answers Daffodils: Passage-1Rohan CharlesNo ratings yet
- Radiation Heat Transfer ExperimentDocument6 pagesRadiation Heat Transfer ExperimentDaniel IsmailNo ratings yet
- Application of Negative Stiffness Devices For Seismic Protection of Bridge StructuresDocument10 pagesApplication of Negative Stiffness Devices For Seismic Protection of Bridge StructuresganeshNo ratings yet
- Chapter Four: The Cost of Capital 4.1. The Concept of Cost of CapitalDocument9 pagesChapter Four: The Cost of Capital 4.1. The Concept of Cost of Capitalmelat felekeNo ratings yet
- REVIEWERDocument9 pagesREVIEWERangel alabadoNo ratings yet
- PreviewDocument254 pagesPreviewIgor OkNo ratings yet