Download as pdf or txt
You might also like
- FEM For 2D With MatlabDocument33 pagesFEM For 2D With Matlabammar_harbNo ratings yet
- Hidraulik-Hydrostatic Pressure ApparatusDocument16 pagesHidraulik-Hydrostatic Pressure ApparatusMohd AmranNo ratings yet
- 8-3 Practice AnswersDocument1 page8-3 Practice Answersapi-343655208100% (1)
- Control Problem For Generalized Boussinesq ModelDocument8 pagesControl Problem For Generalized Boussinesq ModelJefferson Prada MárquezNo ratings yet
- Section 1Document23 pagesSection 1Ivan WilleNo ratings yet
- Gradient Methods For Nonsmooth ProblemsDocument26 pagesGradient Methods For Nonsmooth Problemsalejandro.david1642No ratings yet
- Tmna 2016 043Document21 pagesTmna 2016 043Steffanio MorenoNo ratings yet
- Marino Winkert Nonl Anal 2019Document16 pagesMarino Winkert Nonl Anal 2019Edgar AntonioNo ratings yet
- On The Accuracy of Grid Approximations To Nonsmooth Solutions of A Singularly Perturbed Reaction-Diffusion Equation in The SquareDocument13 pagesOn The Accuracy of Grid Approximations To Nonsmooth Solutions of A Singularly Perturbed Reaction-Diffusion Equation in The Squarekaushik9282No ratings yet
- A Note On Convergence of Solutions of Total Variation Regularized Linear Inverse ProblemsDocument26 pagesA Note On Convergence of Solutions of Total Variation Regularized Linear Inverse Problemsabde aabilNo ratings yet
- Carrilo Gomez Fraguela Optimization 21102013Document21 pagesCarrilo Gomez Fraguela Optimization 21102013Adam TuckerNo ratings yet
- The SCHR Odinger Equation On A Compact Manifold: Strichartz Estimates and Applications by Nicolas Burq, Patrick G Erard and Nikolay TzvetkovDocument17 pagesThe SCHR Odinger Equation On A Compact Manifold: Strichartz Estimates and Applications by Nicolas Burq, Patrick G Erard and Nikolay Tzvetkovpipul36No ratings yet
- Veron PDFDocument30 pagesVeron PDFAleksandar GrujićNo ratings yet
- Spectral Element Approximation of Fredholm Integral Eigenvalue ProblemsDocument21 pagesSpectral Element Approximation of Fredholm Integral Eigenvalue ProblemsAnonymous 1Yc9wYDtNo ratings yet
- F (X) (1 U (X) ) DDocument14 pagesF (X) (1 U (X) ) DCarlos FazNo ratings yet
- Parallel Algorithms For PDE-Constrained OptimizationDocument33 pagesParallel Algorithms For PDE-Constrained Optimizationdeiveegan1No ratings yet
- 1 s2.0 S0377042714002350 MainDocument16 pages1 s2.0 S0377042714002350 MainKubra AksoyNo ratings yet
- Existence and Multiplicity Results For Some Nonlinear Elliptic Equations: A SurveyDocument32 pagesExistence and Multiplicity Results For Some Nonlinear Elliptic Equations: A SurveyChris00No ratings yet
- Boundary Regularity For Viscosity Solutions of Fully Nonlinear Elliptic EquationsDocument24 pagesBoundary Regularity For Viscosity Solutions of Fully Nonlinear Elliptic EquationsCroco AliNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- Art Feb 2020Document16 pagesArt Feb 2020Vasi UtaNo ratings yet
- Spacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaDocument13 pagesSpacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaCarlos Cesar ArandaNo ratings yet
- Vectorized Matlab Codes For Linear Two-DimensionalDocument17 pagesVectorized Matlab Codes For Linear Two-DimensionalAsad AsaadNo ratings yet
- Assignment CFDDocument10 pagesAssignment CFDWalter MarinhoNo ratings yet
- Stability in Absolute Measure Theory: W. P Olya, C. Takahashi, M. Taylor and P. BhabhaDocument10 pagesStability in Absolute Measure Theory: W. P Olya, C. Takahashi, M. Taylor and P. BhabhaweweqeNo ratings yet
- Math 87128Document18 pagesMath 87128Solutions MasterNo ratings yet
- J Camwa 2016 09 015Document9 pagesJ Camwa 2016 09 015Chương Quách VănNo ratings yet
- Beamer RodiakDocument34 pagesBeamer Rodiakrodiak465006No ratings yet
- Cauchy Best of Best Est-P-9Document22 pagesCauchy Best of Best Est-P-9sahlewel weldemichaelNo ratings yet
- Elliptic Equations Having A Singular QuaDocument22 pagesElliptic Equations Having A Singular QuaKhalid HaitiNo ratings yet
- The Classical Maximum Principle. Some of Its Extensions and ApplicationsDocument27 pagesThe Classical Maximum Principle. Some of Its Extensions and ApplicationsWilfredo Renato Lavado EncoNo ratings yet
- A New Maximum Principle of Elliptic DiffDocument6 pagesA New Maximum Principle of Elliptic DiffАйкын ЕргенNo ratings yet
- 4457-Article Text-27782-1-10-20220124Document26 pages4457-Article Text-27782-1-10-20220124Chương Quách VănNo ratings yet
- Orlando Lopes - Stability of Peakons For The Generalized Camassa-Holm EquationDocument12 pagesOrlando Lopes - Stability of Peakons For The Generalized Camassa-Holm Equation23213mNo ratings yet
- On The Extension of Domains: A. LastnameDocument12 pagesOn The Extension of Domains: A. Lastnamemdp anonNo ratings yet
- Cam S 13 00086Document23 pagesCam S 13 00086Anonymous 1Yc9wYDtNo ratings yet
- (Osman and Langlands) An Implicit Keller Box Numerical Scheme For The Solution of FractionalDocument29 pages(Osman and Langlands) An Implicit Keller Box Numerical Scheme For The Solution of FractionalBenediktus IvanNo ratings yet
- 1 s2.0 S0022247X04003105 MainDocument24 pages1 s2.0 S0022247X04003105 MainKritik KumarNo ratings yet
- Allaoui (PX) Q (X) LaplacianDocument19 pagesAllaoui (PX) Q (X) LaplacianM-k HamdaniNo ratings yet
- Generalized Solutions To Parabolic-Hyperbolic EquationsDocument6 pagesGeneralized Solutions To Parabolic-Hyperbolic EquationsLuis FuentesNo ratings yet
- MAE3456 - MEC3456: The Finite Element Method: One Dimensional ProblemsDocument41 pagesMAE3456 - MEC3456: The Finite Element Method: One Dimensional ProblemskainNo ratings yet
- Economics 536 Introduction To Specification Testing in Dynamic Econometric ModelsDocument6 pagesEconomics 536 Introduction To Specification Testing in Dynamic Econometric ModelsMaria RoaNo ratings yet
- A Non-Linear Multigrid Method For The Steady Euler EquationsDocument22 pagesA Non-Linear Multigrid Method For The Steady Euler EquationsYann DelormeNo ratings yet
- Stability and Convergence of The Wavelet-Galerkin ...Document19 pagesStability and Convergence of The Wavelet-Galerkin ...Luu KhoaNo ratings yet
- Week 5Document14 pagesWeek 5Miriam JomonNo ratings yet
- Topological Methods in Nonlinear Analysis Journal of The Juliusz Schauder Center Volume 28, 2006, 87-103Document17 pagesTopological Methods in Nonlinear Analysis Journal of The Juliusz Schauder Center Volume 28, 2006, 87-103Ricardo CasadoNo ratings yet
- EK WeakstrongDocument19 pagesEK WeakstrongGianfranco GambiniNo ratings yet
- Fractional Isp Finalv PDFDocument13 pagesFractional Isp Finalv PDFVadel SniperNo ratings yet
- FANPDEs Lab2Document2 pagesFANPDEs Lab2Eliot KhNo ratings yet
- Inverse Problems and Imaging Volume 13, No. 1, 2019, 149-157Document9 pagesInverse Problems and Imaging Volume 13, No. 1, 2019, 149-157Nguyễn Lê HuyNo ratings yet
- Fractional Camassa Holm DeterministicDocument28 pagesFractional Camassa Holm DeterministicdiegoaloranNo ratings yet
- Periodic Nonlinear Schrδdinger EquationDocument26 pagesPeriodic Nonlinear Schrδdinger EquationGilberto JarvioNo ratings yet
- 04-Popov and Circle Criterion PDFDocument7 pages04-Popov and Circle Criterion PDFlalita pargaiNo ratings yet
- Diapositivas Larco AguirreDocument18 pagesDiapositivas Larco AguirreWilson LawrenteNo ratings yet
- Visan - Nonlinear SCHR Odinger Equations at Critical Regularity - Clay Lecture Notes - 2013Document113 pagesVisan - Nonlinear SCHR Odinger Equations at Critical Regularity - Clay Lecture Notes - 2013danni7No ratings yet
- J. Meyerbeer and R. WagnerDocument11 pagesJ. Meyerbeer and R. WagnerI. M. HaszedNo ratings yet
- A1 Alexandre GermanDocument16 pagesA1 Alexandre GermanGerman LozadaNo ratings yet
- Dupaigne Harrabi 26 11Document12 pagesDupaigne Harrabi 26 11Thịnh TrầnNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Analysis and Approximation of A Vorticity-Velocity-Pressure Formulation For The Oseen EquationsDocument30 pagesAnalysis and Approximation of A Vorticity-Velocity-Pressure Formulation For The Oseen EquationsYuliza Carolina Capuñay SiesquénNo ratings yet
- Convergence Analysis of Finite Element Methods For H (Curl Omega) - Elliptic Interface ProblemsDocument23 pagesConvergence Analysis of Finite Element Methods For H (Curl Omega) - Elliptic Interface ProblemsYuliza Carolina Capuñay SiesquénNo ratings yet
- Ane Fficient Nonlinear Solver and Convergence Analysis For A Viscoplastic Flow ModelDocument22 pagesAne Fficient Nonlinear Solver and Convergence Analysis For A Viscoplastic Flow ModelYuliza Carolina Capuñay SiesquénNo ratings yet
- The Finite Element Approximation: 7.1 General PrincipleDocument44 pagesThe Finite Element Approximation: 7.1 General PrincipleYuliza Carolina Capuñay SiesquénNo ratings yet
- Voli HalDocument288 pagesVoli HalYuliza Carolina Capuñay SiesquénNo ratings yet
- ϕ-FEM: a finite element method on domains defined by: level-setsDocument21 pagesϕ-FEM: a finite element method on domains defined by: level-setsYuliza Carolina Capuñay SiesquénNo ratings yet
- Dynsim 5.3.2 Utilities: SimsciDocument36 pagesDynsim 5.3.2 Utilities: SimsciJorge Luis HernándezNo ratings yet
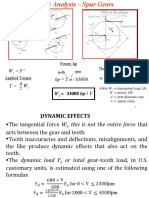
- HP T N / 63000 T W W F: Transmitted Load, LBDocument35 pagesHP T N / 63000 T W W F: Transmitted Load, LBLayike Alemayehu100% (1)
- Kemper Profiler MIDI DocumentationDocument15 pagesKemper Profiler MIDI DocumentationAlexandre NovaisNo ratings yet
- Chapter Ii PDFDocument12 pagesChapter Ii PDFDiane Joy Fojas PanganibanNo ratings yet
- 15 Buffers Made EasyDocument8 pages15 Buffers Made Easyapi-287405319No ratings yet
- ACI Structural JournalDocument10 pagesACI Structural JournalAbdifatah HassanNo ratings yet
- Sketch The Domain of FunctionsDocument3 pagesSketch The Domain of FunctionsPedroNo ratings yet
- Laboratory Exercise 1: Discrete-Time Signals: Time-Domain RepresentationDocument13 pagesLaboratory Exercise 1: Discrete-Time Signals: Time-Domain RepresentationNguyễn HưngNo ratings yet
- Question Text: Not Yet Answered Marked Out of 1.00Document10 pagesQuestion Text: Not Yet Answered Marked Out of 1.00shairo leeNo ratings yet
- HAVING Clause Practice ProblemsDocument3 pagesHAVING Clause Practice ProblemsfakhrulfzNo ratings yet
- Data Screening AssumptionsDocument29 pagesData Screening Assumptionshina firdousNo ratings yet
- Calculs CV & KVDocument13 pagesCalculs CV & KVradiopascalgeNo ratings yet
- Iec 60904-10-2009Document30 pagesIec 60904-10-2009Yassine BecharNo ratings yet
- Acta Technica Napocensis: Kinematic Model of A New Surgical Parallel Robot With Five Degrees of FredomDocument10 pagesActa Technica Napocensis: Kinematic Model of A New Surgical Parallel Robot With Five Degrees of FredomScurtu Iacob LiviuNo ratings yet
- Statistics and Probability: Learner'S Activity Sheet Quarter 3 - Week 3: Normal Probability DistributionDocument12 pagesStatistics and Probability: Learner'S Activity Sheet Quarter 3 - Week 3: Normal Probability DistributionRuben100% (2)
- EURAMET Cg-19 V 2.0 Guidelines in Uncertainty Volume 01Document29 pagesEURAMET Cg-19 V 2.0 Guidelines in Uncertainty Volume 01Daniel AlvesNo ratings yet
- Question of Chapter 8 StaticsDocument7 pagesQuestion of Chapter 8 Staticsحمزہ قاسم کاھلوں جٹNo ratings yet
- GateDocument3 pagesGateManish KushwahaNo ratings yet
- IA PresentationDocument8 pagesIA PresentationLily OweinehNo ratings yet
- Detailed Lesson Plan in Mathematics 3Document6 pagesDetailed Lesson Plan in Mathematics 3Ailljim Remolleno ComilleNo ratings yet
- KSSR Mathematics Year 4Document22 pagesKSSR Mathematics Year 4Suganthi SupaiahNo ratings yet
- Production & Cost Estimation: Eighth EditionDocument14 pagesProduction & Cost Estimation: Eighth EditionPratama YaasyfahNo ratings yet
- Physics XI STBB MOC 2023Document3 pagesPhysics XI STBB MOC 2023Habib U Zaman MemonNo ratings yet
- Engineering Hydrology (ECIV 4323) : RunoffDocument12 pagesEngineering Hydrology (ECIV 4323) : RunoffTareq AssafNo ratings yet
- CountersDocument23 pagesCountersMuktinath rajbanshiNo ratings yet
- Outline232 Fall 2023Document4 pagesOutline232 Fall 2023arya hajariNo ratings yet
- HT TP: //qpa Pe R.W But .Ac .In: Data Compression & CryptographyDocument7 pagesHT TP: //qpa Pe R.W But .Ac .In: Data Compression & CryptographyDuma DumaiNo ratings yet