Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DIY Hammock StandDocument8 pagesDIY Hammock Standmargalaz100% (1)
- Recewed 9 No Ember 1992 Recewed For Publication 14 December 1992Document18 pagesRecewed 9 No Ember 1992 Recewed For Publication 14 December 1992Ebru AnaNo ratings yet
- Perpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Document17 pagesPerpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Ebru AnaNo ratings yet
- Feng 497 Project Proposal: Izmir University of Economics Faculty of Engineering XXX EngineeringDocument4 pagesFeng 497 Project Proposal: Izmir University of Economics Faculty of Engineering XXX EngineeringEbru AnaNo ratings yet
- The Effects of The Generating Pin Size and Placement On The Curvature A N D Displacement of Epitrochoidal Gerotors E. BeardtDocument17 pagesThe Effects of The Generating Pin Size and Placement On The Curvature A N D Displacement of Epitrochoidal Gerotors E. BeardtEbru AnaNo ratings yet
- Plate Compactor (Electric) Checklist Drafted For Shapar.Document3 pagesPlate Compactor (Electric) Checklist Drafted For Shapar.Alves Edattukaran100% (1)
- MB 1650, 1650 DP: Spare Parts ListDocument52 pagesMB 1650, 1650 DP: Spare Parts ListElizabeth OctagonNo ratings yet
- Annex-A (4 5%)Document3 pagesAnnex-A (4 5%)Naveed KhanNo ratings yet
- Mechanical Drawing S4 Basic Rules of DrawingDocument26 pagesMechanical Drawing S4 Basic Rules of DrawingJasen Purwa AdiNo ratings yet
- Palfinger PK 15500 Load ChartDocument2 pagesPalfinger PK 15500 Load ChartD Chandra Sekhar100% (2)
- Reinforcement 11.05Document2 pagesReinforcement 11.05Noratiqah Binti Mohd AminNo ratings yet
- CONNECTION: DETAIL-D8 - Bolted Moment End Plate: UB406X178X54 Gr.S275 UB406X178X54 B1 B2Document6 pagesCONNECTION: DETAIL-D8 - Bolted Moment End Plate: UB406X178X54 Gr.S275 UB406X178X54 B1 B2Akhil VNNo ratings yet
- Boe Exam Preparation PDFDocument12 pagesBoe Exam Preparation PDFAnand Swami78% (18)
- VIS Standard and Wheel Motors 45 Series: Parts and Repair InformationDocument14 pagesVIS Standard and Wheel Motors 45 Series: Parts and Repair Informationeaglego00100% (1)
- Solution To Taylors Tool Life ProblemsDocument1 pageSolution To Taylors Tool Life Problems19G133 VASANTH B100% (1)
- CEE 241 Notes IV PDFDocument93 pagesCEE 241 Notes IV PDFNguyen DuyNo ratings yet
- Module 10 - 2 Hydraulic Power PacksDocument63 pagesModule 10 - 2 Hydraulic Power PacksJaphet GabatanNo ratings yet
- Dimension Flange AsmeDocument10 pagesDimension Flange AsmeHanif SaidonNo ratings yet
- Santosh G Kelshekar - AssortedDocument10 pagesSantosh G Kelshekar - AssortedscemanjuNo ratings yet
- Plan of Staircase: RevisionsDocument1 pagePlan of Staircase: RevisionsMd Mukarram RezaNo ratings yet
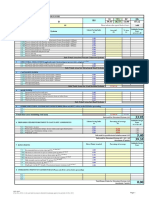
- Buildability Score CalculationDocument4 pagesBuildability Score CalculationtangkokhongNo ratings yet
- Grund Fos LiteratureDocument92 pagesGrund Fos LiteratureEuribiades CordobaNo ratings yet
- Instruction: Answer All Question: Assignment 1 Analysis of Prestress and Bending Stress BFS 40303Document4 pagesInstruction: Answer All Question: Assignment 1 Analysis of Prestress and Bending Stress BFS 40303tashadzureenNo ratings yet
- A116000-A709500 Technical Bulletin Rev2Document6 pagesA116000-A709500 Technical Bulletin Rev2Edgar PintoNo ratings yet
- Data Sheets Figure 320 Wafer Figure 322 Lugged Butterfly Valves Keystone en en 5445790Document4 pagesData Sheets Figure 320 Wafer Figure 322 Lugged Butterfly Valves Keystone en en 5445790Kevin AlmeidaNo ratings yet
- Spare Parts List: Forward and Reversible PlateDocument44 pagesSpare Parts List: Forward and Reversible PlatealmirNo ratings yet
- Repairs and Maintenance: Service ManualDocument66 pagesRepairs and Maintenance: Service Manualvadim vadimNo ratings yet
- Lu-202Xlm Installation Manual: 1.confirmation Prior To InstallationDocument12 pagesLu-202Xlm Installation Manual: 1.confirmation Prior To InstallationthiagoxsantosNo ratings yet
- Alfa Laval MAB 103-24 High Speed Seperator Spare Parts Catalog l1270119 - 02 - v10Document61 pagesAlfa Laval MAB 103-24 High Speed Seperator Spare Parts Catalog l1270119 - 02 - v10Ricardo Torres ZamudioNo ratings yet
- 2 Transmission - SD22 & SD32Document67 pages2 Transmission - SD22 & SD32Plstina RamsNo ratings yet
- PM P1 D5 - Problemas Deformación PlásticaDocument4 pagesPM P1 D5 - Problemas Deformación PlásticaAnggieGarcésNo ratings yet
- Parveen: Technical ManualDocument16 pagesParveen: Technical ManualDEATH ASSASSIN GAMERNo ratings yet
- Bootz Bath Spec Sheet Aloha Plus AfrDocument2 pagesBootz Bath Spec Sheet Aloha Plus AfrJMNo ratings yet
- Axial Piston Variable Pump A10VSO Series 32 - R902462477 - Data SheetDocument56 pagesAxial Piston Variable Pump A10VSO Series 32 - R902462477 - Data SheetSunny KumarNo ratings yet