Download as pdf or txt
You might also like
- Details of 127 Unauthorised Residential Layouts With in Bangalore DevelopmentDocument32 pagesDetails of 127 Unauthorised Residential Layouts With in Bangalore Developmentsanjay2_2260% (5)
- Review of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsDocument8 pagesReview of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsAntonela PortaNo ratings yet
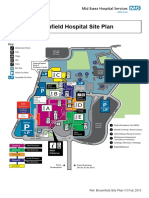
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Encyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFDocument3,338 pagesEncyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFMahfuzur Rahman SiddikyNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- HMX Fundamentals Public Application - April - May - June 2019 - Personal InformationDocument6 pagesHMX Fundamentals Public Application - April - May - June 2019 - Personal InformationMichaelJonatanNo ratings yet
- KH-HO - NG-MAI-CH - NH - 1.xlsx Filename UTF-8''KH-HOÀNG-MAI-CH - NHÀ-1Document549 pagesKH-HO - NG-MAI-CH - NH - 1.xlsx Filename UTF-8''KH-HOÀNG-MAI-CH - NHÀ-1Lê Minh TuânNo ratings yet
- US Patent 7090236 Land SailingDocument8 pagesUS Patent 7090236 Land SailingDimas MaulanaNo ratings yet
- European Patent Specification: Power GeneratorDocument21 pagesEuropean Patent Specification: Power GeneratorMarlon MataNo ratings yet
- Us 20080264323Document26 pagesUs 20080264323ASeaSlugNo ratings yet
- (2 UK Patent (1S GB, 2537820 (13) B: TrainDocument21 pages(2 UK Patent (1S GB, 2537820 (13) B: TrainTâm DươngNo ratings yet
- European Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftDocument31 pagesEuropean Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftgorgiNo ratings yet
- European Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftDocument23 pagesEuropean Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftgorgiNo ratings yet
- Engine Pylon PDFDocument9 pagesEngine Pylon PDFSergioMelgarejoNo ratings yet
- US3670996 Nose Gear DeflectorDocument4 pagesUS3670996 Nose Gear DeflectorkippcamNo ratings yet
- United States Patent (19) : (45) July 1, 1975Document6 pagesUnited States Patent (19) : (45) July 1, 1975Rodrigo ContrerasNo ratings yet
- US20110108676A1Document10 pagesUS20110108676A1Sasank KomarlaNo ratings yet
- US3889885Document7 pagesUS3889885Claudinei MayerNo ratings yet
- United States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Document26 pagesUnited States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Soma GhoshNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2006/0118021 A1Document13 pagesPatent Application Publication (10) Pub. No.: US 2006/0118021 A1sam a g mNo ratings yet
- US5304036Document24 pagesUS5304036wen longNo ratings yet
- Schedule B "Scope of Service": 1. GeneralDocument13 pagesSchedule B "Scope of Service": 1. Generalali tareenNo ratings yet
- EP0631553B1Document29 pagesEP0631553B1wen longNo ratings yet
- Screw Turbine Power GenerationDocument6 pagesScrew Turbine Power GenerationWidji SlametNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2013/0256465 A1Document10 pagesPatent Application Publication (10) Pub. No.: US 2013/0256465 A1gorgiNo ratings yet
- 2x WLSV - Specification Rev 0Document69 pages2x WLSV - Specification Rev 0pal_malayNo ratings yet
- Fractal Impeller Agitator PatentDocument21 pagesFractal Impeller Agitator PatentDilip MauryaNo ratings yet
- Atp 43 BMTP 43 BDocument54 pagesAtp 43 BMTP 43 Bsrichalam01No ratings yet
- US20140302938A1Document15 pagesUS20140302938A1雷黎明No ratings yet
- Steering Gear, Stabilisers and HydraulicsDocument15 pagesSteering Gear, Stabilisers and HydraulicsThomasIrudayamNo ratings yet
- Pac12 JB SM Paper 25-Nov-11Document11 pagesPac12 JB SM Paper 25-Nov-11BuckinghamsterNo ratings yet
- Pipe Layer With Side BoomDocument14 pagesPipe Layer With Side BoomAndré Meirelles100% (1)
- United States Patent: (54) SailboatDocument5 pagesUnited States Patent: (54) Sailboat155No ratings yet
- Fix Pitch PropellerDocument7 pagesFix Pitch PropellerRisandi Dwirama PutraNo ratings yet
- United States Patent (19) : Gazalel, 72 8Document7 pagesUnited States Patent (19) : Gazalel, 72 8Mihai RobertNo ratings yet
- Ship Design For Efficiency and Economy-7-226-61-65Document5 pagesShip Design For Efficiency and Economy-7-226-61-65galin8575No ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument7 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAaron LuoNo ratings yet
- European Patent Application B64C 15/02, B64C 19/02Document46 pagesEuropean Patent Application B64C 15/02, B64C 19/02gorgiNo ratings yet
- United States Patent: 73) Assignee Mcdonnell Douglas CorporationDocument9 pagesUnited States Patent: 73) Assignee Mcdonnell Douglas CorporationgorgiNo ratings yet
- United States Patent (19) : VicardDocument4 pagesUnited States Patent (19) : Vicard155100% (1)
- TEPZZ 44 - 67ZB - T: European Patent SpecificationDocument24 pagesTEPZZ 44 - 67ZB - T: European Patent SpecificationgorgiNo ratings yet
- US20060005473A1Document19 pagesUS20060005473A1Temp AccNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2013/0014683 A1Document12 pagesPatent Application Publication (10) Pub. No.: US 2013/0014683 A1sam a g mNo ratings yet
- Wave PowerDocument28 pagesWave PowerNick ShaffnerNo ratings yet
- EP06808858NWB1Document13 pagesEP06808858NWB1keikhosravy.mNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2014/0021016 A1Document14 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2014/0021016 A1Kalai SelvanNo ratings yet
- 125 Ton AHTSSV SpecificationDocument86 pages125 Ton AHTSSV SpecificationChakma NhikiNo ratings yet
- Us 20110278520Document11 pagesUs 20110278520احمد عبدالكريمNo ratings yet
- General Arrangement PDFDocument33 pagesGeneral Arrangement PDFJeesonAntonyNo ratings yet
- United States Patent (10) Patent No.: US 8,919,272 B2Document10 pagesUnited States Patent (10) Patent No.: US 8,919,272 B263No ratings yet
- EP3112258B1Document56 pagesEP3112258B1邓帅No ratings yet
- US20120056033A1Document8 pagesUS20120056033A1雷黎明No ratings yet
- US20050266956A1Document9 pagesUS20050266956A1RAJ ANKITNo ratings yet
- Us 8714131Document11 pagesUs 8714131MahnooshNo ratings yet
- 4x 65 Ton AHTS Specification Rev 0Document85 pages4x 65 Ton AHTS Specification Rev 0pal_malay100% (1)
- A Backpack For Harvesting Electrical Energy During Walking and Minimzing The Shoulder StrainDocument35 pagesA Backpack For Harvesting Electrical Energy During Walking and Minimzing The Shoulder StrainAnureet BhardwajNo ratings yet
- US20100236232A1 Liebherr Hybrid ExcavatorDocument8 pagesUS20100236232A1 Liebherr Hybrid ExcavatorPHÁT NGUYỄN THẾ100% (1)
- PATENT - Axial Flux Motor AssemblyDocument13 pagesPATENT - Axial Flux Motor Assemblyrakeshee2007No ratings yet
- US3981460Document5 pagesUS3981460MERIWON SURTAN JOHN / UPMNo ratings yet
- 80 Ton AHTS Specification Rev 0Document81 pages80 Ton AHTS Specification Rev 0Mark Samsel RohanNo ratings yet
- Us 4812080Document10 pagesUs 4812080JonNo ratings yet
- Paper Session 4 Hawks Wood MDocument20 pagesPaper Session 4 Hawks Wood Msea_jazzNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Small Unmanned Fixed-wing Aircraft Design: A Practical ApproachFrom EverandSmall Unmanned Fixed-wing Aircraft Design: A Practical ApproachNo ratings yet
- Design of Foundations for Offshore Wind TurbinesFrom EverandDesign of Foundations for Offshore Wind TurbinesRating: 5 out of 5 stars5/5 (3)
- (2 UK Patent (1S GB, 2537820 (13) B: TrainDocument21 pages(2 UK Patent (1S GB, 2537820 (13) B: TrainTâm DươngNo ratings yet
- Dissertation Sailan KhaledDocument198 pagesDissertation Sailan KhaledTâm DươngNo ratings yet
- United States Patent: BaileyDocument10 pagesUnited States Patent: BaileyTâm DươngNo ratings yet
- Xiaotong Li, Liqin Xie, Hongbing Wang, Fangfang Zhai, Hong Wang and Lijie ZhaoDocument5 pagesXiaotong Li, Liqin Xie, Hongbing Wang, Fangfang Zhai, Hong Wang and Lijie ZhaoTâm DươngNo ratings yet
- (Thesis) Development of Experimental Testing of An Amphibious VehicleDocument237 pages(Thesis) Development of Experimental Testing of An Amphibious VehicleTâm DươngNo ratings yet
- Ada 224841Document190 pagesAda 224841Tâm DươngNo ratings yet
- Feynman ParadoxDocument3 pagesFeynman ParadoxBabai KunduNo ratings yet
- Lesson Handouts ARGDocument26 pagesLesson Handouts ARGsamantha sisonNo ratings yet
- Ongc V Saw PipesDocument9 pagesOngc V Saw PipesManisha SinghNo ratings yet
- Ict Dos and DontsDocument5 pagesIct Dos and DontsLouwellaEredianoIbabaoNo ratings yet
- Construction of A 170m Long Cripple Sided Tunnel Using Variable Geometry Hydraulic Formwork in DTL 3, C927Document16 pagesConstruction of A 170m Long Cripple Sided Tunnel Using Variable Geometry Hydraulic Formwork in DTL 3, C927Batu GajahNo ratings yet
- History of Subcontinent NewspapersDocument1 pageHistory of Subcontinent NewspapersDaniyal Abbas Khan100% (3)
- Polymers in Our Daily Life PDFDocument2 pagesPolymers in Our Daily Life PDFAnjali Reddy ANo ratings yet
- Countries and Diplomas Diploma Requirements Wageningen University 2023/2024Document11 pagesCountries and Diplomas Diploma Requirements Wageningen University 2023/2024JuliaNo ratings yet
- HKB Industrial Boiler PlantsDocument12 pagesHKB Industrial Boiler PlantsIvan KorlevicNo ratings yet
- How To Read Wiring DiagramsDocument24 pagesHow To Read Wiring Diagramsagoudimies100% (7)
- Hdat2en 4 52Document156 pagesHdat2en 4 52blahh12345689No ratings yet
- Complete Guide For Growing Plants Hydroponically by J Benton Jones JR B00hznqitmDocument5 pagesComplete Guide For Growing Plants Hydroponically by J Benton Jones JR B00hznqitmnagesh dolasNo ratings yet
- Associated Labor Union v. BorromeoDocument2 pagesAssociated Labor Union v. BorromeoJaneen ZamudioNo ratings yet
- Didactic ProductHighlights 2020 v2.6Document20 pagesDidactic ProductHighlights 2020 v2.6agus prasetioNo ratings yet
- Reactivity Series Homework Worksheet LADocument4 pagesReactivity Series Homework Worksheet LAkevinzhao704No ratings yet
- General RelativityDocument401 pagesGeneral RelativityAbdilatif MohamudNo ratings yet
- Resident Medical Officer KAmL4W116erDocument4 pagesResident Medical Officer KAmL4W116erAman TyagiNo ratings yet
- Experiment No. 2: Aim: A) D Flip-Flop: Synchronous VHDL CodeDocument6 pagesExperiment No. 2: Aim: A) D Flip-Flop: Synchronous VHDL CodeRahul MishraNo ratings yet
- Alphard Maintenance PackagesDocument2 pagesAlphard Maintenance PackagesTrader Teknik SqdNo ratings yet
- KVP Measurements On Mammography Machines With The Raysafe X2 SystemDocument7 pagesKVP Measurements On Mammography Machines With The Raysafe X2 SystemomarcuratoloNo ratings yet
- With Reference To MedimattersDocument3 pagesWith Reference To MedimattersGema Saltos ToalaNo ratings yet
- Pasolink NEO Version Up Procedure - Ver3.1.7 - by PNMXJDocument15 pagesPasolink NEO Version Up Procedure - Ver3.1.7 - by PNMXJdlgt63No ratings yet
- Software License Certificate: 2018-03-26 102314 HUB Qflc-Ohrx-Kqw Z-QNXB - Oa Jj-Xasb-QywkDocument2 pagesSoftware License Certificate: 2018-03-26 102314 HUB Qflc-Ohrx-Kqw Z-QNXB - Oa Jj-Xasb-QywkJuan LamasNo ratings yet
- Barelf CHDocument1 pageBarelf CHironiteNo ratings yet