Download as docx, pdf, or txt
You might also like
- Physics Investigatory ProjectDocument26 pagesPhysics Investigatory ProjectGourav Jain76% (34)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 8d-14d PFC Controller Manual PDFDocument29 pages8d-14d PFC Controller Manual PDFSergio100% (1)
- Stepper Motor ReportDocument19 pagesStepper Motor ReportIan Bagunas100% (2)
- Stepper MotorsDocument53 pagesStepper MotorsirfancardiagnosticNo ratings yet
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- A Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineDocument35 pagesA Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineSupriya RakshitNo ratings yet
- Step Motor Engineer (2002 Catlog)Document13 pagesStep Motor Engineer (2002 Catlog)engineer86No ratings yet
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- Experiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesDocument8 pagesExperiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesAyaz FaisalNo ratings yet
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- Instrumentation 2: Stepper MotorsDocument24 pagesInstrumentation 2: Stepper MotorsBabei Ionut-MihaiNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Stepper Motor PDFDocument15 pagesStepper Motor PDFNadeeshani SamarasingheNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- Stepper MotorDocument13 pagesStepper Motorjit dharaNo ratings yet
- Lab 4 Stepper Motor PDFDocument10 pagesLab 4 Stepper Motor PDFIrfan HaiderNo ratings yet
- Stepper Motor AssignmentDocument12 pagesStepper Motor AssignmentShyamu29No ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- I/ Structure and Operation: Stepper MotorDocument11 pagesI/ Structure and Operation: Stepper MotorTuanVUNo ratings yet
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- 1 - Stepper MotorDocument3 pages1 - Stepper MotorHARSHIT TOMARNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- Stepper Motors: Stepper Motor vs. Servo MotorDocument13 pagesStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- Variable Reluctance MotorDocument14 pagesVariable Reluctance MotorgbksnNo ratings yet
- There Are Few Types of Stepper MotorsDocument41 pagesThere Are Few Types of Stepper Motorsmanoj kumarNo ratings yet
- A Stepper MotorDocument10 pagesA Stepper MotorMohammed SiddiqueNo ratings yet
- MotorDocument29 pagesMotorbokor45836No ratings yet
- Introduction: Unipolar Stepper MotorDocument4 pagesIntroduction: Unipolar Stepper MotorRishabh PandayNo ratings yet
- Module1.Stepper Motor and Its ControlDocument79 pagesModule1.Stepper Motor and Its ControlOmkar GuptaNo ratings yet
- Stepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversityDocument18 pagesStepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversitycrsarinNo ratings yet
- Ali - Stepper MotorsDocument18 pagesAli - Stepper MotorsJisha KuruvillaNo ratings yet
- Stepper MotorsDocument17 pagesStepper MotorsJadeNo ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- A Stepper, or Stepping Motor ConvertsDocument25 pagesA Stepper, or Stepping Motor ConvertsFaizan SaeedNo ratings yet
- Electric DrivesDocument16 pagesElectric DrivesvigneshNo ratings yet
- SmotorDocument20 pagesSmotorAamer MohammedNo ratings yet
- Intro Stepper PDFDocument44 pagesIntro Stepper PDFHansean WidjajaNo ratings yet
- Special Machines: Theory, Modeling, Control and ApplicationsDocument31 pagesSpecial Machines: Theory, Modeling, Control and ApplicationsRAJA MNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Stepper Motor: Stepper Motors and Their ControllersDocument59 pagesStepper Motor: Stepper Motors and Their ControllersJain Marshel B100% (1)
- Stepper MotorDocument14 pagesStepper MotorJade Mark RamosNo ratings yet
- Stepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesDocument5 pagesStepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesMd Samee MNo ratings yet
- Industrial Circuits Application NoteDocument3 pagesIndustrial Circuits Application Notequechild180No ratings yet
- Ch2 Stepper MotorDocument60 pagesCh2 Stepper MotorKinjal ShahNo ratings yet
- "Stepper Motor Control Using Arduino": Minor ProjectDocument22 pages"Stepper Motor Control Using Arduino": Minor ProjectNâwãl KîšhôřNo ratings yet
- H Assignment 2Document5 pagesH Assignment 2Isuru KodikaraNo ratings yet
- 080544R - Stepper Motor and DriversDocument8 pages080544R - Stepper Motor and DriversAnuruddha WijerathneNo ratings yet
- Stepper Motors With ArduinoDocument19 pagesStepper Motors With Arduinochafic WEISSNo ratings yet
- Stepper Motor BasicsDocument11 pagesStepper Motor BasicsrvpilotNo ratings yet
- Stepper Motor Construction and AnalysisDocument17 pagesStepper Motor Construction and AnalysisHadeedAhmedSher100% (3)
- Step MotDocument1 pageStep MotPropolis MeliaNo ratings yet
- What Is A Stepper MotorDocument8 pagesWhat Is A Stepper MotorGnanasekarNo ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- 9927 CH 9Document25 pages9927 CH 9varaprasad93No ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Motor AppplicationDocument17 pagesMotor Appplicationtajul tonoyNo ratings yet
- Voice Controlled Robotic VehicleDocument22 pagesVoice Controlled Robotic Vehiclemustafa shabanNo ratings yet
- PWM & MPPT Solar Charge Controller RangeDocument1 pagePWM & MPPT Solar Charge Controller RangeSystellarNo ratings yet
- Features: Switching Transistor Jan, Jantx, JantxvDocument9 pagesFeatures: Switching Transistor Jan, Jantx, Jantxvanandmn7026No ratings yet
- MantDocument2 pagesMantAstudillo Garcia DanielNo ratings yet
- FACTS Review 3 New Final Report PDFDocument24 pagesFACTS Review 3 New Final Report PDFsumitNo ratings yet
- Frequently Asked Electrical Engineering Interview QuestionsDocument2 pagesFrequently Asked Electrical Engineering Interview Questionsveeru_virenderNo ratings yet
- Gen DesignDocument24 pagesGen Designprasad5034No ratings yet
- Modern Vacuum Tube Amplifier: Sergejs PopovsDocument50 pagesModern Vacuum Tube Amplifier: Sergejs PopovsEnos Marcos BastosNo ratings yet
- An 9742Document12 pagesAn 9742EmersonMagnoMoraesNo ratings yet
- 3 Winding TransformersDocument6 pages3 Winding Transformerspinky_lopez7No ratings yet
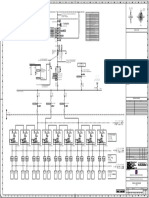
- SPP If Single Line DrawingDocument1 pageSPP If Single Line DrawingAzree Mohd NoorNo ratings yet
- In Service Inspection and Testing of Electrical Equipment The Insulation TestDocument3 pagesIn Service Inspection and Testing of Electrical Equipment The Insulation TestBalasoobramaniam CarooppunnenNo ratings yet
- Ques EmecDocument4 pagesQues EmecAvinash SinghNo ratings yet
- ELECS4 Module (5) - UJT PUT PDFDocument27 pagesELECS4 Module (5) - UJT PUT PDFNoel BactonNo ratings yet
- UCI274H 25 TD EN - Rev - BDocument8 pagesUCI274H 25 TD EN - Rev - Bteja sri rama murthyNo ratings yet
- Electrical Wiring DiagramsDocument3 pagesElectrical Wiring DiagramsTanya PiriyabunharnNo ratings yet
- D. Lesson PlanDocument5 pagesD. Lesson PlanLowell Lastima Ramboyong PasturanNo ratings yet
- Agri Price ListDocument28 pagesAgri Price Listvipulpanchotiya0% (1)
- Digital Multi Meter KM 6040Document1 pageDigital Multi Meter KM 6040industrialindiaNo ratings yet
- Ecosport Escape Ecosport: 431-1171-LD 231-1134-RD 431-1182-LDDocument45 pagesEcosport Escape Ecosport: 431-1171-LD 231-1134-RD 431-1182-LDLuis Manuel Eduardo ContrerasNo ratings yet
- Spaj160 BrochureDocument8 pagesSpaj160 Brochuresheik5316No ratings yet
- Allen Bradley AB 193 T1AA80 PDFDocument11 pagesAllen Bradley AB 193 T1AA80 PDFDjonky TanaumaNo ratings yet
- Led 3 MMDocument1 pageLed 3 MMAska PersonalityNo ratings yet
- Assignment 3Document4 pagesAssignment 3Manasi JainNo ratings yet
- Specification Sheet (2n3904)Document2 pagesSpecification Sheet (2n3904)RaFaT HaQNo ratings yet
- Belimo NR24A - Datasheet - En-GbDocument3 pagesBelimo NR24A - Datasheet - En-GbJLNavarroNo ratings yet
- 400V N-Channel MOSFET: FTP06N40/FTA06N40Document11 pages400V N-Channel MOSFET: FTP06N40/FTA06N40Cube7 GeronimoNo ratings yet
- EM Budget and Plan For 2019-20 Fiscal YearDocument55 pagesEM Budget and Plan For 2019-20 Fiscal Yearአረጋዊ ሐይለማርያምNo ratings yet