Download as pdf or txt
You might also like
- Chap 1 IntroductionDocument80 pagesChap 1 IntroductionNick Seiff PatrickNo ratings yet
- Signalling & Train Control Solution For MML4: Project: Mumbai Metro Rail Project Line 4Document29 pagesSignalling & Train Control Solution For MML4: Project: Mumbai Metro Rail Project Line 4MANISH KUMAR100% (1)
- ALSTOM High Speed Trains More Than 30 Years of ExperienceDocument24 pagesALSTOM High Speed Trains More Than 30 Years of ExperiencesorinarseneNo ratings yet
- Feasibility Report - PresentationDocument43 pagesFeasibility Report - PresentationinfoNo ratings yet
- Department of Transport Management Technology, The Federal University of Technology, Akure, NigeriaDocument22 pagesDepartment of Transport Management Technology, The Federal University of Technology, Akure, NigeriaJUMMIENo ratings yet
- Sig Telcom PDFDocument82 pagesSig Telcom PDFFALAN TONNo ratings yet
- Training ReportDocument53 pagesTraining ReportHarshita [ KumariNo ratings yet
- Pertemuan 6 - Jalan Rel Dan Kereta ApiDocument30 pagesPertemuan 6 - Jalan Rel Dan Kereta ApiMaya MitchellNo ratings yet
- Calculating Train Braking Distance: David Barney, David Haley and George NikandrosDocument7 pagesCalculating Train Braking Distance: David Barney, David Haley and George NikandrosBurakNo ratings yet
- Introduction To Railway EngineeringDocument46 pagesIntroduction To Railway Engineeringsagarshiwakoti88% (26)
- Indian RailwaysDocument22 pagesIndian RailwayssuyogNo ratings yet
- Aerodynamic Effects of High Speed Trains On Passengers Track Workers and Other PeopleDocument26 pagesAerodynamic Effects of High Speed Trains On Passengers Track Workers and Other PeopleVirendra Kumar PareekNo ratings yet
- Assignment 2 - Highway and Railway MaintenanceDocument13 pagesAssignment 2 - Highway and Railway MaintenanceZaki 7070No ratings yet
- Automation of Railway GateDocument47 pagesAutomation of Railway GatebakshikamranaNo ratings yet
- A Control Scheme For Automatic Level Crossings Under The ERTMS/ETCS Level 2/3 OperationDocument14 pagesA Control Scheme For Automatic Level Crossings Under The ERTMS/ETCS Level 2/3 OperationTiémogo TRAORENo ratings yet
- ERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana IRSSE, MIRSTE, MIRSEDocument6 pagesERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana IRSSE, MIRSTE, MIRSERohitNo ratings yet
- Train-To-Train Propagation at 450 MHZ: (Intelligence-On-Wheels - De, DLR - De)Document5 pagesTrain-To-Train Propagation at 450 MHZ: (Intelligence-On-Wheels - De, DLR - De)hosseinNo ratings yet
- Monorail System and StructuresDocument104 pagesMonorail System and StructuresAlaa ElelwanyNo ratings yet
- YatendraDocument57 pagesYatendraMatthew BennettNo ratings yet
- RailwayDocument10 pagesRailwayanitha indhuNo ratings yet
- FinalDocument14 pagesFinalAvik K Dutta100% (1)
- Application: and Development of CTCSDocument32 pagesApplication: and Development of CTCSCoolAldi WRNo ratings yet
- Rail Scout 200502Document4 pagesRail Scout 200502V Karthic KumarNo ratings yet
- Safe Train SeparationDocument4 pagesSafe Train SeparationbassamNo ratings yet
- Signal ReportDocument5 pagesSignal Reportkijeyad352No ratings yet
- Proposal For Suspended Monorail in WellingtonDocument49 pagesProposal For Suspended Monorail in WellingtonJoel MacManusNo ratings yet
- Indian Railway TrainingDocument25 pagesIndian Railway TrainingJayant Soni57% (7)
- Basic Concepts of SignallingDocument285 pagesBasic Concepts of Signallingj320f samsungNo ratings yet
- Signalling SysmemDocument15 pagesSignalling SysmemRuslan KuzhekovNo ratings yet
- Methods & Solutions To Increase Line Capacity On Railway LineDocument20 pagesMethods & Solutions To Increase Line Capacity On Railway LineBreakwater SanurNo ratings yet
- Perfil 2331c RailDocument6 pagesPerfil 2331c RailJavier VasquezNo ratings yet
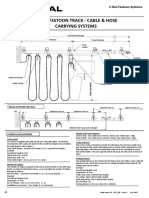
- C Rail Festoon Track Cable & Hose Carrying SystemsDocument6 pagesC Rail Festoon Track Cable & Hose Carrying SystemsJavier VasquezNo ratings yet
- A Broadcast Vehicle To Vehicle Communication SysteDocument7 pagesA Broadcast Vehicle To Vehicle Communication Syste다원시스No ratings yet
- Highspeed TrainDocument22 pagesHighspeed TrainAbhimanyu Singh Bhati100% (1)
- Transformers À Grande VitesseDocument10 pagesTransformers À Grande VitesseLyna HamadouNo ratings yet
- Back To Basics - Signals (Final) (Revision 1)Document10 pagesBack To Basics - Signals (Final) (Revision 1)Saidani DjamelNo ratings yet
- Train Delay & Economic Impact of In-Service Failures of Railroad Rolling StockDocument10 pagesTrain Delay & Economic Impact of In-Service Failures of Railroad Rolling StockVedula Sunil SharmaNo ratings yet
- Train XXXXXDocument85 pagesTrain XXXXXrahul281081No ratings yet
- Wheel/Rail Contact Analysis of Tramways and Lrvs Against DerailmentDocument5 pagesWheel/Rail Contact Analysis of Tramways and Lrvs Against DerailmentKamel BelloutiNo ratings yet
- ERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana, IRSSE, MIRSTE, MIRSEDocument6 pagesERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana, IRSSE, MIRSTE, MIRSENitheesh Omanakuttan NairNo ratings yet
- Unit1 IntroductionDocument17 pagesUnit1 Introductionupadhyay kulbhushanNo ratings yet
- Preemtionmanual 2004Document170 pagesPreemtionmanual 2004igoklyNo ratings yet
- Automatic Train OperationDocument6 pagesAutomatic Train OperationAnupam KhandelwalNo ratings yet
- VTN Op WCRR2003Document9 pagesVTN Op WCRR2003NelmarNo ratings yet
- Train Detection, The Basics by Paul Darlington and David Fenner - Back To Basics PDFDocument8 pagesTrain Detection, The Basics by Paul Darlington and David Fenner - Back To Basics PDFShashi Bhusan SinghNo ratings yet
- Communication and Signalling: Practical Summer Training Report ON in Esteemed Organigation OF Indian RailwaysDocument53 pagesCommunication and Signalling: Practical Summer Training Report ON in Esteemed Organigation OF Indian RailwaysMayank Krishnan75% (4)
- Chương 2 TRAFFIC FLOWDocument35 pagesChương 2 TRAFFIC FLOWNam SùNo ratings yet
- The Development and Principles of UK SignallingDocument62 pagesThe Development and Principles of UK SignallingesataydinNo ratings yet
- Sonet/Sdh: Smita Rai, Anpeng Huang, Suman SarkarDocument29 pagesSonet/Sdh: Smita Rai, Anpeng Huang, Suman Sarkarbindi160No ratings yet
- Calculating Train Braking DistanceDocument7 pagesCalculating Train Braking DistanceShauna MooreNo ratings yet
- Pedestrian Flow Characteristic of Typical Metro Station N - 2014 - Procedia EngiDocument6 pagesPedestrian Flow Characteristic of Typical Metro Station N - 2014 - Procedia EngijanainaNo ratings yet
- Modern - Railways March.2023Document102 pagesModern - Railways March.2023denmarksucks623No ratings yet
- AAR3Document4 pagesAAR3yeseki8683No ratings yet
- Holistic Railway System Control: International Journal of Application or Innovation in Engineering & Management (IJAIEM)Document4 pagesHolistic Railway System Control: International Journal of Application or Innovation in Engineering & Management (IJAIEM)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Module 1Document74 pagesModule 1tonylau19971031No ratings yet
- Diff Between SDH & OTNDocument21 pagesDiff Between SDH & OTNSiva KumarNo ratings yet
- ECE Monorail System Report PDFDocument19 pagesECE Monorail System Report PDFsai charanNo ratings yet
- False Starts & Near Misses: Railwaymen’s Stories about the Challenges of Running a RailwayFrom EverandFalse Starts & Near Misses: Railwaymen’s Stories about the Challenges of Running a RailwayNo ratings yet
- Signal Integrity: From High-Speed to Radiofrequency ApplicationsFrom EverandSignal Integrity: From High-Speed to Radiofrequency ApplicationsNo ratings yet
- Guideline For Ccsauthorisationonrailfreightcorridor1Document62 pagesGuideline For Ccsauthorisationonrailfreightcorridor1Nitheesh Omanakuttan NairNo ratings yet
- ERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana, IRSSE, MIRSTE, MIRSEDocument6 pagesERTMS/ETCS - Indian Railways Perspective: P Venkata Ramana, IRSSE, MIRSTE, MIRSENitheesh Omanakuttan NairNo ratings yet
- UK Implementation Plan For Technical Specification For Interoperability (TSI) Control, Command and Signalling (CCS)Document9 pagesUK Implementation Plan For Technical Specification For Interoperability (TSI) Control, Command and Signalling (CCS)Nitheesh Omanakuttan NairNo ratings yet
- CCS TSI Compliant On-Board ETCS Development: Featured ArticlesDocument5 pagesCCS TSI Compliant On-Board ETCS Development: Featured ArticlesNitheesh Omanakuttan NairNo ratings yet
- Automatic Train Protection: Signalling Principles Engineering StandardDocument42 pagesAutomatic Train Protection: Signalling Principles Engineering StandardNitheesh Omanakuttan NairNo ratings yet
- Forklift Operator ManualDocument23 pagesForklift Operator ManualCris SuyamNo ratings yet
- VikasDocument2 pagesVikaskamaleshkumar00No ratings yet
- Railway Season Tickets: Sample General Training Reading True False Not GivenDocument3 pagesRailway Season Tickets: Sample General Training Reading True False Not GivenGloria JaisonNo ratings yet
- Tarmac Porous Asphalts Range BrochureDocument7 pagesTarmac Porous Asphalts Range BrochureAya AbdeenNo ratings yet
- LNG R&D For The Liquefaction and Regasification Processes: 1.theme DescriptionDocument9 pagesLNG R&D For The Liquefaction and Regasification Processes: 1.theme DescriptionVikas PatelNo ratings yet
- CH 1-16-30 Introduction To Traffic EngineeringDocument15 pagesCH 1-16-30 Introduction To Traffic EngineeringHambaNo ratings yet
- Private Security ListDocument9 pagesPrivate Security ListEnrique AlonsoNo ratings yet
- Auspicious Time For Buying A CarDocument3 pagesAuspicious Time For Buying A CarAbhishek KumarNo ratings yet
- Limiting Liability of CargoDocument7 pagesLimiting Liability of Cargosaif100% (1)
- Biển BáoDocument9 pagesBiển BáoThanh ThanhNo ratings yet
- D2Z India - Industry Assessment - Product LandscapeDocument26 pagesD2Z India - Industry Assessment - Product LandscapeSidharth MaheshNo ratings yet
- UBBFDocument8 pagesUBBFheyydekoNo ratings yet
- Intro-Bridge EngineeringDocument35 pagesIntro-Bridge Engineeringjhess QuevadaNo ratings yet
- Notice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsDocument3 pagesNotice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsJustia.comNo ratings yet
- PGDM 2014-16 IV Strategy Management Dr. Rakesh Gupta Tata Motors - Strategy Management OriginalDocument26 pagesPGDM 2014-16 IV Strategy Management Dr. Rakesh Gupta Tata Motors - Strategy Management OriginalKavita DhakaNo ratings yet
- The Inchcape RockDocument3 pagesThe Inchcape RockVedashree BaneNo ratings yet
- Site Arrangement Plan KFRDocument10 pagesSite Arrangement Plan KFRhessian123No ratings yet
- High-Torque, All-Hydraulic Auger DrillDocument2 pagesHigh-Torque, All-Hydraulic Auger DrillAsif KhanzadaNo ratings yet
- DLA Rules 2014 With Amendmetns PDF Version 1 PDFDocument20 pagesDLA Rules 2014 With Amendmetns PDF Version 1 PDFMussarat Asghar AliNo ratings yet
- Marine Electrical TechnologyDocument48 pagesMarine Electrical TechnologySaurabh Kumar ThakurNo ratings yet
- BMW Hints and TipsDocument3 pagesBMW Hints and Tipsnorfitri100% (5)
- Remove-Install Charge Air PipeDocument1 pageRemove-Install Charge Air PipeCarlos MurilloNo ratings yet
- VecsDocument3 pagesVecsMahesh PooniaNo ratings yet
- Tire RollerDocument1 pageTire RollerCalvin ThamNo ratings yet
- OHT Semi Gantry CraneDocument1 pageOHT Semi Gantry Cranesai KRISHNANo ratings yet
- French Pioneers in The West Indies, 1624-1664. Crouse, Nellis Maynard, 1884Document307 pagesFrench Pioneers in The West Indies, 1624-1664. Crouse, Nellis Maynard, 1884Dionisio Mesye100% (1)
- Automotive TransmissionDocument128 pagesAutomotive TransmissionjrvinodNo ratings yet
- BMW Z4 - Torquedriveshaft - Complete1Document3 pagesBMW Z4 - Torquedriveshaft - Complete1Achille MyetteNo ratings yet
- CSR Gyprock Plasterboard - Cornices - Ceiling Tiles SDS - 7.12.2020Document6 pagesCSR Gyprock Plasterboard - Cornices - Ceiling Tiles SDS - 7.12.2020jr-nts ntsNo ratings yet