
Eqs 298 M
Eqs 298 M
You might also like
- Principles of Passive Supplemental Damping and Seismic PDFDocument396 pagesPrinciples of Passive Supplemental Damping and Seismic PDFPatricio Chicaiza0% (1)
- Space and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Document474 pagesSpace and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Verónica E. Flores100% (3)
- Ricoh MP3010-Service ManualDocument36 pagesRicoh MP3010-Service ManualPeter xuNo ratings yet
- StickyquestionlabtedsDocument9 pagesStickyquestionlabtedsapi-287235370100% (4)
- TFS Branching Guide - Scenarios 2.0Document20 pagesTFS Branching Guide - Scenarios 2.0pradeepku.b100% (1)
- HW5 Shatha TahaDocument6 pagesHW5 Shatha TahaAbdullah tahaNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- Chemical Engineering ScienceDocument7 pagesChemical Engineering ScienceclaudiosldfNo ratings yet
- Evaluation of Damping Modification Factors For Seismic Response SpectraDocument13 pagesEvaluation of Damping Modification Factors For Seismic Response SpectraSebastián Giraldo GrisalesNo ratings yet
- Bommer Mendis 2005Document21 pagesBommer Mendis 2005avdhoowheeNo ratings yet
- Prognostic Evaluation of Assumptions Used by Cumulus ParameterizationsDocument27 pagesPrognostic Evaluation of Assumptions Used by Cumulus ParameterizationsNabilla AkhirtaNo ratings yet
- Atta 2007Document10 pagesAtta 2007samuNo ratings yet
- Atta2007 PDFDocument10 pagesAtta2007 PDFSam MeNo ratings yet
- Maricopa Inversion Revised MS - PRNDocument44 pagesMaricopa Inversion Revised MS - PRNkibokoisrael072No ratings yet
- Fajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuresDocument17 pagesFajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuressbanerjeeNo ratings yet
- Stewart 2017Document47 pagesStewart 2017Mriganabh ChoudhuryNo ratings yet
- 1.4.12. 2005 Scaling of Spectral Displacement Ordinates With Damping RatiosDocument21 pages1.4.12. 2005 Scaling of Spectral Displacement Ordinates With Damping RatiosJuan BravoNo ratings yet
- Papa Gian No Poulos 2011Document5 pagesPapa Gian No Poulos 2011Zainab MalikNo ratings yet
- Zhang 2015Document9 pagesZhang 2015Ishthiaq PashaNo ratings yet
- Using Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleDocument15 pagesUsing Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleShahid Ur RehmanNo ratings yet
- Beyer Bommer 2006 - Relationships Between Median ValuesDocument11 pagesBeyer Bommer 2006 - Relationships Between Median ValuesVicente SuarezNo ratings yet
- 10 PDFDocument19 pages10 PDFArmen AsatryantsNo ratings yet
- T3a.3.ms519 345F-2Document17 pagesT3a.3.ms519 345F-2Anonymous hk1fhAkwyNo ratings yet
- Comparison of WRF Model Physics Pram Over Mena CordexDocument23 pagesComparison of WRF Model Physics Pram Over Mena CordexsallyNo ratings yet
- Cfdmodeling of Bubble Columns Ows: Implementation of Population BalanceDocument7 pagesCfdmodeling of Bubble Columns Ows: Implementation of Population BalanceAnshuman SinhaNo ratings yet
- Elastic and Inelastic Seismic Response of Buildings With Damping SystemsDocument17 pagesElastic and Inelastic Seismic Response of Buildings With Damping SystemsNakiNo ratings yet
- Macedo Etal 2018-Seismic Slope HazardDocument28 pagesMacedo Etal 2018-Seismic Slope HazardklayalaespolNo ratings yet
- ABE OLYNICK Et Al. RaultDocument29 pagesABE OLYNICK Et Al. RaultFortunato NetoNo ratings yet
- Compatible Acceleration and Displacement Spectra For Seismic Design CodesDocument8 pagesCompatible Acceleration and Displacement Spectra For Seismic Design CodeskvvrajkumarNo ratings yet
- Korotkov Auc2008Document12 pagesKorotkov Auc2008klomps_jrNo ratings yet
- Membranes 11 00338Document19 pagesMembranes 11 00338Alsultan AlsultanNo ratings yet
- Artificial Neural Network Model For Predicting Minimum FluidizationDocument13 pagesArtificial Neural Network Model For Predicting Minimum Fluidizationเดชา อินทร์โท่โล่No ratings yet
- Developments in Response Spectrum - Based Stochastic Response of Structural SystemsDocument19 pagesDevelopments in Response Spectrum - Based Stochastic Response of Structural SystemsVinay GuptaNo ratings yet
- 2 BNZSEE1623 Bayless&Condon NZ+Cybershake WorkingDocument13 pages2 BNZSEE1623 Bayless&Condon NZ+Cybershake WorkingshubhamNo ratings yet
- Land Use ChangeDocument13 pagesLand Use ChangeZora PapankovaNo ratings yet
- Seismic Performance Uncertainty Estimation Via IDA With Progressive Accelerogram-Wise Latin Hypercube SamplingDocument16 pagesSeismic Performance Uncertainty Estimation Via IDA With Progressive Accelerogram-Wise Latin Hypercube SamplingAnonymous PDEpTC4No ratings yet
- Ground Motion Evaluation Procedures of Performance Based DesignDocument8 pagesGround Motion Evaluation Procedures of Performance Based DesignRaju PalNo ratings yet
- Analysis of WRF Model Performance Over SubtropicalDocument14 pagesAnalysis of WRF Model Performance Over Subtropicalsaurabh2480022072No ratings yet
- Selecting and Scaling AccelerometersDocument8 pagesSelecting and Scaling AccelerometerscadelNo ratings yet
- Progress in Electromagnetics Research, Vol. 114, 33-49, 2011Document17 pagesProgress in Electromagnetics Research, Vol. 114, 33-49, 2011Sandip MaityNo ratings yet
- Data Assimilation Using An Ensemble Kalman Filter TechniqueDocument16 pagesData Assimilation Using An Ensemble Kalman Filter TechniqueVirgiawan Huda AkbarNo ratings yet
- Davy 2018Document23 pagesDavy 2018Prasanth SNo ratings yet
- Hong Zhang Goda BSSA 2009Document8 pagesHong Zhang Goda BSSA 2009Carlos A GonzaNo ratings yet
- Bayesian Inverse Problem and OptimizatioDocument17 pagesBayesian Inverse Problem and OptimizatioВиталий ДроздовNo ratings yet
- SiteSpecificSeismicHazardAnalysis McGuire ToroDocument6 pagesSiteSpecificSeismicHazardAnalysis McGuire ToroPedro Troncoso AcuñaNo ratings yet
- RANS Simulation of Turbulent Diffusive Combustion Using Open FoamDocument14 pagesRANS Simulation of Turbulent Diffusive Combustion Using Open FoamGunvir SinghNo ratings yet
- Treasure Island - ShakeDocument11 pagesTreasure Island - ShakeSergio ChísicaNo ratings yet
- Modal Pushover-Based Scaling of Records For Nonlinear RHA of One-Story Unsymmetric-Plan BuildingsDocument10 pagesModal Pushover-Based Scaling of Records For Nonlinear RHA of One-Story Unsymmetric-Plan BuildingsTarak A PositiveNo ratings yet
- Computer Modelling of Gas Explosion Propagation in Offshore ModulesDocument10 pagesComputer Modelling of Gas Explosion Propagation in Offshore Modulesigor VladimirovichNo ratings yet
- Data Assimi MM5Document18 pagesData Assimi MM5AjayNo ratings yet
- A Comparative Analysis of Site-Specific Response Spectral Amplification ModelsDocument31 pagesA Comparative Analysis of Site-Specific Response Spectral Amplification ModelsGopu RNo ratings yet
- Spe 212231 MsDocument20 pagesSpe 212231 MsmemeNo ratings yet
- 1039 SdofDocument8 pages1039 SdofMuhammad Yasser ANo ratings yet
- Draft - Procedures - Time History - Selection-ModificationDocument3 pagesDraft - Procedures - Time History - Selection-ModificationMARIA PAULA TRILLEROS LOZANONo ratings yet
- Validation of An Efficient Cfd-Dem Model For Large Scale Fluidized BedsDocument6 pagesValidation of An Efficient Cfd-Dem Model For Large Scale Fluidized BedsMuhammad Adnan LaghariNo ratings yet
- Jurnal TPSDocument12 pagesJurnal TPSNurul HabibahNo ratings yet
- Learning Algorithms Allow For Improved Reliability and Accuracy of Global Mean Surface Temperature ProjectionsDocument8 pagesLearning Algorithms Allow For Improved Reliability and Accuracy of Global Mean Surface Temperature Projectionsghufron mubarokNo ratings yet
- An Improved Method of Matching Response Spectra of Recorded Earthquake Ground Motion Using Wavelets PDFDocument23 pagesAn Improved Method of Matching Response Spectra of Recorded Earthquake Ground Motion Using Wavelets PDFAnonymous 7lnR7QkssNo ratings yet
- An Explicit Method Based On The Implicit Runge-KutDocument16 pagesAn Explicit Method Based On The Implicit Runge-KutMarcela DiasNo ratings yet
- 2009 Hill Lackmann TCPBLDocument21 pages2009 Hill Lackmann TCPBLThomas LakasNo ratings yet
- Parameterising Cloud Base Updraft Velocity of Marine StratocumuliDocument26 pagesParameterising Cloud Base Updraft Velocity of Marine StratocumuliijmadhavanNo ratings yet
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- High Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorFrom EverandHigh Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorNo ratings yet
- Fluid Dynamics in Complex Fractured-Porous SystemsFrom EverandFluid Dynamics in Complex Fractured-Porous SystemsBoris FaybishenkoNo ratings yet
- Advances in the iterative coupling between flow-geomechanical simulators: applied to cases with different contour conditionsFrom EverandAdvances in the iterative coupling between flow-geomechanical simulators: applied to cases with different contour conditionsRating: 5 out of 5 stars5/5 (1)
- CIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionDocument38 pagesCIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionPatricio ChicaizaNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- CIE626-Chapter-3-Energy ConceptsDocument30 pagesCIE626-Chapter-3-Energy ConceptsPatricio ChicaizaNo ratings yet
- CIE626-Chapter-2-Design and AnalysisDocument43 pagesCIE626-Chapter-2-Design and AnalysisPatricio ChicaizaNo ratings yet
- CIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionDocument38 pagesCIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionPatricio ChicaizaNo ratings yet
- 9 Real and Virtual ImageDocument3 pages9 Real and Virtual Imagepiravin kNo ratings yet
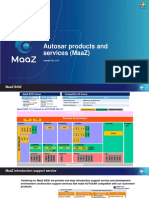
- Autosar Products and Services (Maaz) : SoftwareDocument12 pagesAutosar Products and Services (Maaz) : Softwarethanhmaikmt123456No ratings yet
- Transactions Instructions OnlyDocument6 pagesTransactions Instructions Onlyeric fajardoNo ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
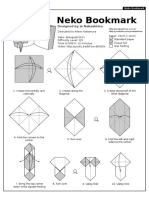
- Neko Bookmark: Designed by Jo NakashimaDocument4 pagesNeko Bookmark: Designed by Jo NakashimaEzra BlatzNo ratings yet
- Anchor Handling PDFDocument56 pagesAnchor Handling PDFEdwien Arif WicaksonoNo ratings yet
- Class XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDocument77 pagesClass XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDeepak SinghNo ratings yet
- Practical Exam IJSO 2012Document8 pagesPractical Exam IJSO 2012mpecthNo ratings yet
- PreviewpdfDocument70 pagesPreviewpdfArjun RajNo ratings yet
- List of Formulas Useful For Solving Aptitude QuestionsDocument5 pagesList of Formulas Useful For Solving Aptitude Questionssrokar1234No ratings yet
- Hvac For ArchicadDocument46 pagesHvac For ArchicadAlejandroRosasNo ratings yet
- MCC - 450 KW PDFDocument4 pagesMCC - 450 KW PDFnelutu1973No ratings yet
- Lecture 05 Electric FluxDocument52 pagesLecture 05 Electric FluxNova PiattosNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- BPE 3.0 Service Creditcards.1.06Document12 pagesBPE 3.0 Service Creditcards.1.06rainashwetaNo ratings yet
- Homeinteriorpaint FractionsdecimalsandpercentsDocument4 pagesHomeinteriorpaint Fractionsdecimalsandpercentsapi-281744400No ratings yet
- ORM FeatureDocument10 pagesORM Featureaniket somNo ratings yet
- Area and Power Efficient Ecc For Multiple Adjacent Bit Errors in SramsDocument4 pagesArea and Power Efficient Ecc For Multiple Adjacent Bit Errors in Sramssri deviNo ratings yet
- Communication Signals and System Design: K L UniversityDocument11 pagesCommunication Signals and System Design: K L UniversitykarthikNo ratings yet
- Selection of Appropriate Software Development Life Cycle Using Fuzzy LogicDocument16 pagesSelection of Appropriate Software Development Life Cycle Using Fuzzy LogicTįtánìâ Rïyå-çhànNo ratings yet
- Statistics Lesson Plan ImprovisedDocument7 pagesStatistics Lesson Plan ImprovisedShafiqah IsmailNo ratings yet
- ch-9 Well FoundationDocument27 pagesch-9 Well FoundationRJ JordanNo ratings yet
- A Quick Introduction To Quantum Espresso: Simone Di Cataldo September 27, 2019Document32 pagesA Quick Introduction To Quantum Espresso: Simone Di Cataldo September 27, 2019Jay Bee SharmaNo ratings yet
- IUPAC Provisional Recommendations: Table VII Ligand AbbreviationsDocument12 pagesIUPAC Provisional Recommendations: Table VII Ligand AbbreviationsSalih PaşaNo ratings yet
- A 1Document2 pagesA 1Phong PiloNo ratings yet



























































































Download as pdf or txt
You might also like
- Principles of Passive Supplemental Damping and Seismic PDFDocument396 pagesPrinciples of Passive Supplemental Damping and Seismic PDFPatricio Chicaiza0% (1)
- Space and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Document474 pagesSpace and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Verónica E. Flores100% (3)
- Ricoh MP3010-Service ManualDocument36 pagesRicoh MP3010-Service ManualPeter xuNo ratings yet
- StickyquestionlabtedsDocument9 pagesStickyquestionlabtedsapi-287235370100% (4)
- TFS Branching Guide - Scenarios 2.0Document20 pagesTFS Branching Guide - Scenarios 2.0pradeepku.b100% (1)
- HW5 Shatha TahaDocument6 pagesHW5 Shatha TahaAbdullah tahaNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- Chemical Engineering ScienceDocument7 pagesChemical Engineering ScienceclaudiosldfNo ratings yet
- Evaluation of Damping Modification Factors For Seismic Response SpectraDocument13 pagesEvaluation of Damping Modification Factors For Seismic Response SpectraSebastián Giraldo GrisalesNo ratings yet
- Bommer Mendis 2005Document21 pagesBommer Mendis 2005avdhoowheeNo ratings yet
- Prognostic Evaluation of Assumptions Used by Cumulus ParameterizationsDocument27 pagesPrognostic Evaluation of Assumptions Used by Cumulus ParameterizationsNabilla AkhirtaNo ratings yet
- Atta 2007Document10 pagesAtta 2007samuNo ratings yet
- Atta2007 PDFDocument10 pagesAtta2007 PDFSam MeNo ratings yet
- Maricopa Inversion Revised MS - PRNDocument44 pagesMaricopa Inversion Revised MS - PRNkibokoisrael072No ratings yet
- Fajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuresDocument17 pagesFajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuressbanerjeeNo ratings yet
- Stewart 2017Document47 pagesStewart 2017Mriganabh ChoudhuryNo ratings yet
- 1.4.12. 2005 Scaling of Spectral Displacement Ordinates With Damping RatiosDocument21 pages1.4.12. 2005 Scaling of Spectral Displacement Ordinates With Damping RatiosJuan BravoNo ratings yet
- Papa Gian No Poulos 2011Document5 pagesPapa Gian No Poulos 2011Zainab MalikNo ratings yet
- Zhang 2015Document9 pagesZhang 2015Ishthiaq PashaNo ratings yet
- Using Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleDocument15 pagesUsing Seismic Inversion and Geostatistics To Estimate Porosity: A Western Canadian Reef ExampleShahid Ur RehmanNo ratings yet
- Beyer Bommer 2006 - Relationships Between Median ValuesDocument11 pagesBeyer Bommer 2006 - Relationships Between Median ValuesVicente SuarezNo ratings yet
- 10 PDFDocument19 pages10 PDFArmen AsatryantsNo ratings yet
- T3a.3.ms519 345F-2Document17 pagesT3a.3.ms519 345F-2Anonymous hk1fhAkwyNo ratings yet
- Comparison of WRF Model Physics Pram Over Mena CordexDocument23 pagesComparison of WRF Model Physics Pram Over Mena CordexsallyNo ratings yet
- Cfdmodeling of Bubble Columns Ows: Implementation of Population BalanceDocument7 pagesCfdmodeling of Bubble Columns Ows: Implementation of Population BalanceAnshuman SinhaNo ratings yet
- Elastic and Inelastic Seismic Response of Buildings With Damping SystemsDocument17 pagesElastic and Inelastic Seismic Response of Buildings With Damping SystemsNakiNo ratings yet
- Macedo Etal 2018-Seismic Slope HazardDocument28 pagesMacedo Etal 2018-Seismic Slope HazardklayalaespolNo ratings yet
- ABE OLYNICK Et Al. RaultDocument29 pagesABE OLYNICK Et Al. RaultFortunato NetoNo ratings yet
- Compatible Acceleration and Displacement Spectra For Seismic Design CodesDocument8 pagesCompatible Acceleration and Displacement Spectra For Seismic Design CodeskvvrajkumarNo ratings yet
- Korotkov Auc2008Document12 pagesKorotkov Auc2008klomps_jrNo ratings yet
- Membranes 11 00338Document19 pagesMembranes 11 00338Alsultan AlsultanNo ratings yet
- Artificial Neural Network Model For Predicting Minimum FluidizationDocument13 pagesArtificial Neural Network Model For Predicting Minimum Fluidizationเดชา อินทร์โท่โล่No ratings yet
- Developments in Response Spectrum - Based Stochastic Response of Structural SystemsDocument19 pagesDevelopments in Response Spectrum - Based Stochastic Response of Structural SystemsVinay GuptaNo ratings yet
- 2 BNZSEE1623 Bayless&Condon NZ+Cybershake WorkingDocument13 pages2 BNZSEE1623 Bayless&Condon NZ+Cybershake WorkingshubhamNo ratings yet
- Land Use ChangeDocument13 pagesLand Use ChangeZora PapankovaNo ratings yet
- Seismic Performance Uncertainty Estimation Via IDA With Progressive Accelerogram-Wise Latin Hypercube SamplingDocument16 pagesSeismic Performance Uncertainty Estimation Via IDA With Progressive Accelerogram-Wise Latin Hypercube SamplingAnonymous PDEpTC4No ratings yet
- Ground Motion Evaluation Procedures of Performance Based DesignDocument8 pagesGround Motion Evaluation Procedures of Performance Based DesignRaju PalNo ratings yet
- Analysis of WRF Model Performance Over SubtropicalDocument14 pagesAnalysis of WRF Model Performance Over Subtropicalsaurabh2480022072No ratings yet
- Selecting and Scaling AccelerometersDocument8 pagesSelecting and Scaling AccelerometerscadelNo ratings yet
- Progress in Electromagnetics Research, Vol. 114, 33-49, 2011Document17 pagesProgress in Electromagnetics Research, Vol. 114, 33-49, 2011Sandip MaityNo ratings yet
- Data Assimilation Using An Ensemble Kalman Filter TechniqueDocument16 pagesData Assimilation Using An Ensemble Kalman Filter TechniqueVirgiawan Huda AkbarNo ratings yet
- Davy 2018Document23 pagesDavy 2018Prasanth SNo ratings yet
- Hong Zhang Goda BSSA 2009Document8 pagesHong Zhang Goda BSSA 2009Carlos A GonzaNo ratings yet
- Bayesian Inverse Problem and OptimizatioDocument17 pagesBayesian Inverse Problem and OptimizatioВиталий ДроздовNo ratings yet
- SiteSpecificSeismicHazardAnalysis McGuire ToroDocument6 pagesSiteSpecificSeismicHazardAnalysis McGuire ToroPedro Troncoso AcuñaNo ratings yet
- RANS Simulation of Turbulent Diffusive Combustion Using Open FoamDocument14 pagesRANS Simulation of Turbulent Diffusive Combustion Using Open FoamGunvir SinghNo ratings yet
- Treasure Island - ShakeDocument11 pagesTreasure Island - ShakeSergio ChísicaNo ratings yet
- Modal Pushover-Based Scaling of Records For Nonlinear RHA of One-Story Unsymmetric-Plan BuildingsDocument10 pagesModal Pushover-Based Scaling of Records For Nonlinear RHA of One-Story Unsymmetric-Plan BuildingsTarak A PositiveNo ratings yet
- Computer Modelling of Gas Explosion Propagation in Offshore ModulesDocument10 pagesComputer Modelling of Gas Explosion Propagation in Offshore Modulesigor VladimirovichNo ratings yet
- Data Assimi MM5Document18 pagesData Assimi MM5AjayNo ratings yet
- A Comparative Analysis of Site-Specific Response Spectral Amplification ModelsDocument31 pagesA Comparative Analysis of Site-Specific Response Spectral Amplification ModelsGopu RNo ratings yet
- Spe 212231 MsDocument20 pagesSpe 212231 MsmemeNo ratings yet
- 1039 SdofDocument8 pages1039 SdofMuhammad Yasser ANo ratings yet
- Draft - Procedures - Time History - Selection-ModificationDocument3 pagesDraft - Procedures - Time History - Selection-ModificationMARIA PAULA TRILLEROS LOZANONo ratings yet
- Validation of An Efficient Cfd-Dem Model For Large Scale Fluidized BedsDocument6 pagesValidation of An Efficient Cfd-Dem Model For Large Scale Fluidized BedsMuhammad Adnan LaghariNo ratings yet
- Jurnal TPSDocument12 pagesJurnal TPSNurul HabibahNo ratings yet
- Learning Algorithms Allow For Improved Reliability and Accuracy of Global Mean Surface Temperature ProjectionsDocument8 pagesLearning Algorithms Allow For Improved Reliability and Accuracy of Global Mean Surface Temperature Projectionsghufron mubarokNo ratings yet
- An Improved Method of Matching Response Spectra of Recorded Earthquake Ground Motion Using Wavelets PDFDocument23 pagesAn Improved Method of Matching Response Spectra of Recorded Earthquake Ground Motion Using Wavelets PDFAnonymous 7lnR7QkssNo ratings yet
- An Explicit Method Based On The Implicit Runge-KutDocument16 pagesAn Explicit Method Based On The Implicit Runge-KutMarcela DiasNo ratings yet
- 2009 Hill Lackmann TCPBLDocument21 pages2009 Hill Lackmann TCPBLThomas LakasNo ratings yet
- Parameterising Cloud Base Updraft Velocity of Marine StratocumuliDocument26 pagesParameterising Cloud Base Updraft Velocity of Marine StratocumuliijmadhavanNo ratings yet
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- High Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorFrom EverandHigh Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorNo ratings yet
- Fluid Dynamics in Complex Fractured-Porous SystemsFrom EverandFluid Dynamics in Complex Fractured-Porous SystemsBoris FaybishenkoNo ratings yet
- Advances in the iterative coupling between flow-geomechanical simulators: applied to cases with different contour conditionsFrom EverandAdvances in the iterative coupling between flow-geomechanical simulators: applied to cases with different contour conditionsRating: 5 out of 5 stars5/5 (1)
- CIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionDocument38 pagesCIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionPatricio ChicaizaNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- CIE626-Chapter-3-Energy ConceptsDocument30 pagesCIE626-Chapter-3-Energy ConceptsPatricio ChicaizaNo ratings yet
- CIE626-Chapter-2-Design and AnalysisDocument43 pagesCIE626-Chapter-2-Design and AnalysisPatricio ChicaizaNo ratings yet
- CIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionDocument38 pagesCIE 626 - Structural Control Chapter 1 - Introduction CIE 626 Structural Control Chapter 1 - IntroductionPatricio ChicaizaNo ratings yet
- 9 Real and Virtual ImageDocument3 pages9 Real and Virtual Imagepiravin kNo ratings yet
- Autosar Products and Services (Maaz) : SoftwareDocument12 pagesAutosar Products and Services (Maaz) : Softwarethanhmaikmt123456No ratings yet
- Transactions Instructions OnlyDocument6 pagesTransactions Instructions Onlyeric fajardoNo ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
- Neko Bookmark: Designed by Jo NakashimaDocument4 pagesNeko Bookmark: Designed by Jo NakashimaEzra BlatzNo ratings yet
- Anchor Handling PDFDocument56 pagesAnchor Handling PDFEdwien Arif WicaksonoNo ratings yet
- Class XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDocument77 pagesClass XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDeepak SinghNo ratings yet
- Practical Exam IJSO 2012Document8 pagesPractical Exam IJSO 2012mpecthNo ratings yet
- PreviewpdfDocument70 pagesPreviewpdfArjun RajNo ratings yet
- List of Formulas Useful For Solving Aptitude QuestionsDocument5 pagesList of Formulas Useful For Solving Aptitude Questionssrokar1234No ratings yet
- Hvac For ArchicadDocument46 pagesHvac For ArchicadAlejandroRosasNo ratings yet
- MCC - 450 KW PDFDocument4 pagesMCC - 450 KW PDFnelutu1973No ratings yet
- Lecture 05 Electric FluxDocument52 pagesLecture 05 Electric FluxNova PiattosNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- BPE 3.0 Service Creditcards.1.06Document12 pagesBPE 3.0 Service Creditcards.1.06rainashwetaNo ratings yet
- Homeinteriorpaint FractionsdecimalsandpercentsDocument4 pagesHomeinteriorpaint Fractionsdecimalsandpercentsapi-281744400No ratings yet
- ORM FeatureDocument10 pagesORM Featureaniket somNo ratings yet
- Area and Power Efficient Ecc For Multiple Adjacent Bit Errors in SramsDocument4 pagesArea and Power Efficient Ecc For Multiple Adjacent Bit Errors in Sramssri deviNo ratings yet
- Communication Signals and System Design: K L UniversityDocument11 pagesCommunication Signals and System Design: K L UniversitykarthikNo ratings yet
- Selection of Appropriate Software Development Life Cycle Using Fuzzy LogicDocument16 pagesSelection of Appropriate Software Development Life Cycle Using Fuzzy LogicTįtánìâ Rïyå-çhànNo ratings yet
- Statistics Lesson Plan ImprovisedDocument7 pagesStatistics Lesson Plan ImprovisedShafiqah IsmailNo ratings yet
- ch-9 Well FoundationDocument27 pagesch-9 Well FoundationRJ JordanNo ratings yet
- A Quick Introduction To Quantum Espresso: Simone Di Cataldo September 27, 2019Document32 pagesA Quick Introduction To Quantum Espresso: Simone Di Cataldo September 27, 2019Jay Bee SharmaNo ratings yet
- IUPAC Provisional Recommendations: Table VII Ligand AbbreviationsDocument12 pagesIUPAC Provisional Recommendations: Table VII Ligand AbbreviationsSalih PaşaNo ratings yet
- A 1Document2 pagesA 1Phong PiloNo ratings yet