Download as pdf or txt
You might also like
- spm-2 Quick Tips Intervention Report SampleDocument3 pagesspm-2 Quick Tips Intervention Report SampleJânio carlos100% (1)
- This Study Resource Was: L19 Quiz: HomeworkDocument3 pagesThis Study Resource Was: L19 Quiz: HomeworkPenny Tratia0% (1)
- Beauty Assessment Booklet - SHBXWHS001 - Apply Safe Hygiene Health and Work Practices - BookletDocument18 pagesBeauty Assessment Booklet - SHBXWHS001 - Apply Safe Hygiene Health and Work Practices - BookletXantia AmoreNo ratings yet
- Q - 1: The Average Starting Salary of Students Who Graduated From Colleges of Business in 2009Document1 pageQ - 1: The Average Starting Salary of Students Who Graduated From Colleges of Business in 2009Yusef ShaqeelNo ratings yet
- SCIENCE5 Summative TestDocument3 pagesSCIENCE5 Summative TestJulie Ann Gaca100% (1)
- Vitotronic Data Points: V200KW2/KW1Document11 pagesVitotronic Data Points: V200KW2/KW1Cyril PerezNo ratings yet
- Artificial Neural Network Supervised LearningDocument14 pagesArtificial Neural Network Supervised LearningsegnumutraNo ratings yet
- Statand Prob Q4 M6Document16 pagesStatand Prob Q4 M6Jessa Banawan EdulanNo ratings yet
- Free Style Podcatsing SciptDocument3 pagesFree Style Podcatsing SciptMark Anthony RagudoNo ratings yet
- PT 506 - Spring 2023 - Patient of The Day - Exercise of The DayDocument14 pagesPT 506 - Spring 2023 - Patient of The Day - Exercise of The DayDonna TsuiNo ratings yet
- Deep Reinforcement Learning - Guide To Deep Q-LearningDocument1 pageDeep Reinforcement Learning - Guide To Deep Q-Learningkwaku GodoNo ratings yet
- Pid ControllerDocument38 pagesPid ControllerCHIRAGNo ratings yet
- Accelerator Programme SlidesDocument15 pagesAccelerator Programme Slidesapi-280374397No ratings yet
- Science Activity Sheet Quarter 4 - MELC 5 Week 4: Conservation of Mechanical EnergyDocument8 pagesScience Activity Sheet Quarter 4 - MELC 5 Week 4: Conservation of Mechanical EnergyRose Ann Chavez60% (5)
- Department of Education: Learning Activity Sheet in General Physics I Newton'S Second Law of MotionDocument7 pagesDepartment of Education: Learning Activity Sheet in General Physics I Newton'S Second Law of MotionKerwin MarasiganNo ratings yet
- Business Ethics M5Document22 pagesBusiness Ethics M5Maria Aireen OndoNo ratings yet
- Measures of Central TendencyDocument20 pagesMeasures of Central TendencyFrancis Philip DalanonNo ratings yet
- DLL - VarianceDocument2 pagesDLL - VariancePatzAlzateParaguyaNo ratings yet
- GENERALPHYSICS1 - Module7 - WEEK7 - Work and EnergyDocument29 pagesGENERALPHYSICS1 - Module7 - WEEK7 - Work and EnergyAdell Anne Ong75% (4)
- Lesson 5 AIDocument38 pagesLesson 5 AImatheusNo ratings yet
- General Physics12 Quarter 1 Module 5Document35 pagesGeneral Physics12 Quarter 1 Module 5Ace GutierrezNo ratings yet
- PsychologyDocument40 pagesPsychologyKerry LiezNo ratings yet
- Reinforcement LearningDocument14 pagesReinforcement LearningSuot Oliver RicoNo ratings yet
- Lecture 4. Basic Probability: PROBABILITY & STATISTICS - Nguyen Hai Duong - NEU - WWW - Mfe.edu - Vn/nguyenhaiduongDocument47 pagesLecture 4. Basic Probability: PROBABILITY & STATISTICS - Nguyen Hai Duong - NEU - WWW - Mfe.edu - Vn/nguyenhaiduongKhả Vy NghiênNo ratings yet
- Stats and ProbDocument10 pagesStats and Probrhosegurion25No ratings yet
- An Analytic Approach: Abilities?Document6 pagesAn Analytic Approach: Abilities?nguyensyhuyNo ratings yet
- Department of Education: Region Ii - Cagayan Valley Schools Division of CagayanDocument3 pagesDepartment of Education: Region Ii - Cagayan Valley Schools Division of CagayanMark Anthony RagudoNo ratings yet
- Administrators Summer Special Education Seminar 2022Document20 pagesAdministrators Summer Special Education Seminar 2022api-234864493No ratings yet
- Reinforcement Learning 1Document11 pagesReinforcement Learning 1Mark RichardNo ratings yet
- Lesson Plan Math Vi DemoDocument9 pagesLesson Plan Math Vi DemoEmorej 000No ratings yet
- Rubin Statistical InferenceDocument21 pagesRubin Statistical InferencepedroNo ratings yet
- ProbStat Lec05Document21 pagesProbStat Lec05Nam KhanhNo ratings yet
- Mechanical Energy6 LP SerionDocument7 pagesMechanical Energy6 LP SerionCybi MethueneNo ratings yet
- ANANA Weekly Home Learning Plan 4th QUARTERDocument7 pagesANANA Weekly Home Learning Plan 4th QUARTERjessa.ananaNo ratings yet
- Math T Coursework 2016Document5 pagesMath T Coursework 2016f5dct2q8100% (2)
- Learning To Be A Better StudentDocument40 pagesLearning To Be A Better StudentJoy To the world100% (1)
- GP1 - Q1 - Week 7Document8 pagesGP1 - Q1 - Week 7Sathya CruzNo ratings yet
- Demo - Teaching - Cross Specialization Training of Senior High School On Non-Major Science Subjects 2.0Document8 pagesDemo - Teaching - Cross Specialization Training of Senior High School On Non-Major Science Subjects 2.0Quezco VelasquezNo ratings yet
- Matthias Schonlau, Ph.D. Statistical Learning - Classification Stat441Document30 pagesMatthias Schonlau, Ph.D. Statistical Learning - Classification Stat4411plus12No ratings yet
- Training Matrix Naguilian Cluster Lac 2023Document3 pagesTraining Matrix Naguilian Cluster Lac 2023Alexis RilleraNo ratings yet
- Activity 3Document1 pageActivity 3api-666985990No ratings yet
- 08 Reinforcement LearningDocument33 pages08 Reinforcement LearningAbdoh AldenhamiNo ratings yet
- AI T8 ReinfoLearningDocument38 pagesAI T8 ReinfoLearningirvingzqyNo ratings yet
- SP LAS 10 Quarter 4 MELC 10Document11 pagesSP LAS 10 Quarter 4 MELC 10Vicky MacaraegNo ratings yet
- ProbStat Lec04Document45 pagesProbStat Lec04Nam KhanhNo ratings yet
- ANANA Weekly Home Learning Plan 1ST QUARTERDocument10 pagesANANA Weekly Home Learning Plan 1ST QUARTERjessa.ananaNo ratings yet
- All Offerings Summer 08Document1 pageAll Offerings Summer 08api-835631No ratings yet
- Science-8 DLL Week1 q1 Star ObservationDocument2 pagesScience-8 DLL Week1 q1 Star ObservationMaám Rosemary B. LandanNo ratings yet
- SHS Class Program Second Semester 2023 2024Document9 pagesSHS Class Program Second Semester 2023 2024Kathrine Jane LunaNo ratings yet
- Lec 11Document45 pagesLec 11daliYopNo ratings yet
- 4 Quarter Performance Task in Statistics and ProbabilityDocument5 pages4 Quarter Performance Task in Statistics and ProbabilitySHS Panaguiton Emma Marimel HUMSS12-ANo ratings yet
- Rewards in Reinforcement LearningDocument12 pagesRewards in Reinforcement LearningJack LumberNo ratings yet
- Homework Newtons Second LawDocument6 pagesHomework Newtons Second Lawyxhosxmpd100% (1)
- ML AssignmentDocument7 pagesML AssignmentjoxekojNo ratings yet
- Lacanlale, Jinnelle ClusterIV CNHSDocument3 pagesLacanlale, Jinnelle ClusterIV CNHSJinnelle LacanlaleNo ratings yet
- Learning Theories - OPERANT CONDITIONINGDocument52 pagesLearning Theories - OPERANT CONDITIONINGAmirah XNo ratings yet
- 1.6-Work and EnergyDocument19 pages1.6-Work and EnergyMa'am Queeny QuetuaNo ratings yet
- MPC 006 Previous Year Question Papers byDocument67 pagesMPC 006 Previous Year Question Papers bySumit PanwarNo ratings yet
- Plasticity IV 2022Document39 pagesPlasticity IV 2022Juan PabloNo ratings yet
- HSS F234 1622Document16 pagesHSS F234 1622Mohan KumarNo ratings yet
- Main Currents of Modern History (Hss F234) : Ptolemy's ModelDocument3 pagesMain Currents of Modern History (Hss F234) : Ptolemy's ModelMohan KumarNo ratings yet
- EMR Setup S2021Document33 pagesEMR Setup S2021Mohan KumarNo ratings yet
- Chapter1 MDPDocument67 pagesChapter1 MDPMohan KumarNo ratings yet
- Developing A Lean Design For Six Sigma Through Supply Chain MethodologyDocument29 pagesDeveloping A Lean Design For Six Sigma Through Supply Chain Methodologysyamsu dhuhaNo ratings yet
- CV Nadjib GHITI UpdatedDocument5 pagesCV Nadjib GHITI Updatednadjib ghitiNo ratings yet
- C++ Project On Railway Ticket ReservationDocument14 pagesC++ Project On Railway Ticket ReservationArka Patra33% (3)
- M03-014 - HVAC Variable Refrigerant Flow (VRF) SystemsDocument38 pagesM03-014 - HVAC Variable Refrigerant Flow (VRF) Systemsjadewest100% (1)
- UPFCDocument10 pagesUPFCAJAN ANo ratings yet
- Getting Started With DigipanDocument8 pagesGetting Started With Digipanverhaegen marc100% (1)
- Application Note: Interfacing The X25650 To The Motorola 68HC11 MicrocontrollerDocument6 pagesApplication Note: Interfacing The X25650 To The Motorola 68HC11 MicrocontrollerJoško NovakovićNo ratings yet
- Curricular Vitae - Groupe Scorpio (Revised)Document4 pagesCurricular Vitae - Groupe Scorpio (Revised)Muthulingam RamiahNo ratings yet
- SW-Project-Proposal-Template-2016-rationale MarifeDocument2 pagesSW-Project-Proposal-Template-2016-rationale MarifeMarife dela Cruz100% (1)
- Fortigate 7000f SeriesDocument15 pagesFortigate 7000f SeriesmatteozamoloNo ratings yet
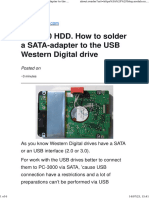
- PC-3000 HDD. How To Solder A SATA-Adapter To The USB Western Digital Drive PC-3000 Support BlogDocument6 pagesPC-3000 HDD. How To Solder A SATA-Adapter To The USB Western Digital Drive PC-3000 Support Blogvampire_mercy8476No ratings yet
- Gpsmap 400/500 Series: Owner's ManualDocument72 pagesGpsmap 400/500 Series: Owner's ManualAndy JamesNo ratings yet
- 67047-Ch14 BaruDocument48 pages67047-Ch14 BaruDanielNo ratings yet
- Bornera Tripolar 5ST2502Document6 pagesBornera Tripolar 5ST2502ErnestoCastilloJarochoNo ratings yet
- Logarithm Exercise Full Solution (Combined)Document40 pagesLogarithm Exercise Full Solution (Combined)Z s2223 6B17 Wai Pui Yan Candace 6B17No ratings yet
- 05 - Time Switches Digital & AnalougeDocument21 pages05 - Time Switches Digital & AnalougePhaniNo ratings yet
- 002 ElementsDocument25 pages002 Elementsmohammed almehdharNo ratings yet
- Calculating The Required Fire FlowDocument11 pagesCalculating The Required Fire FlowAhmed HakamNo ratings yet
- 4 Risk-Based Approach To Compliant GXP Computerized SystemsDocument30 pages4 Risk-Based Approach To Compliant GXP Computerized SystemsPaylo KatolykNo ratings yet
- Global Positioning System Steering (GPSS) Converter Pilot's Operating HandbookDocument32 pagesGlobal Positioning System Steering (GPSS) Converter Pilot's Operating HandbookDanielLobatoBernardesNo ratings yet
- Error Html2pdfDocument2 pagesError Html2pdfJustinNo ratings yet
- Image Processing ReportDocument5 pagesImage Processing ReportTULIPOHAMBA BEVENALIUS JASONNo ratings yet
- Business Description & Vision: Mission StatementDocument19 pagesBusiness Description & Vision: Mission StatementPrincess FatallaNo ratings yet
- Idc MeasureDocument7 pagesIdc MeasurevictorNo ratings yet
- CCT Ccna Routing and Switching All in One Exam Guide Exams 100 490 200 301 Glen E Clarke Richard Deal Full ChapterDocument68 pagesCCT Ccna Routing and Switching All in One Exam Guide Exams 100 490 200 301 Glen E Clarke Richard Deal Full Chapterwanda.dahl659100% (6)
- Specification Atlan A300 Anesthesia Workstation With BISDocument2 pagesSpecification Atlan A300 Anesthesia Workstation With BISPranggodoNo ratings yet
- LVDS and Scaler Testing PDFDocument1 pageLVDS and Scaler Testing PDFMarvin ConstantinoNo ratings yet
- ExploringGears 1Document31 pagesExploringGears 1Florida CityNo ratings yet