Download as doc, pdf, or txt
You might also like
- Parametric - Statistical Analysis PDFDocument412 pagesParametric - Statistical Analysis PDFNaive Manila100% (2)
- APT NotesDocument30 pagesAPT NotesJunaid Y100% (2)
- Terminologies in Simple CurveDocument8 pagesTerminologies in Simple Curvejason roqueNo ratings yet
- Ch4capp AptDocument28 pagesCh4capp AptRajesh VermaNo ratings yet
- Computer Assisted Part ProgrammingDocument47 pagesComputer Assisted Part ProgrammingZaryan Ijaz67% (3)
- Computer Assisted Part ProgrammingDocument65 pagesComputer Assisted Part Programmingmuzafar aliNo ratings yet
- APT LanguageDocument25 pagesAPT Languagevirug1994No ratings yet
- Chapter 3 - NC ProgrammingDocument12 pagesChapter 3 - NC ProgrammingnidhidarklordNo ratings yet
- APT ProgramDocument5 pagesAPT Programpsmonu54No ratings yet
- IENG 475 HO 02 APT Programming Notes PDFDocument5 pagesIENG 475 HO 02 APT Programming Notes PDFrahulNo ratings yet
- IENG 475 HO 02 APT Programming Notes PDFDocument5 pagesIENG 475 HO 02 APT Programming Notes PDFMohd Mansoor HasanNo ratings yet
- Numerical Control of Machine Tools MEE 4430 Unit 4Document49 pagesNumerical Control of Machine Tools MEE 4430 Unit 4Hamza KhanNo ratings yet
- Computer Assisted Part Programming (APT, Automatically Programmed Tool)Document40 pagesComputer Assisted Part Programming (APT, Automatically Programmed Tool)kumareshNo ratings yet
- Unit IV CadcamDocument56 pagesUnit IV CadcamKarshit TakhtaniNo ratings yet
- Computer Assisted Part ProgrammingDocument21 pagesComputer Assisted Part ProgrammingSanthan SalaiNo ratings yet
- Chapter 8 C GrooverDocument21 pagesChapter 8 C GrooverRizwanNadeemNo ratings yet
- Computer Aided Part ProgrammingDocument19 pagesComputer Aided Part ProgrammingPiyush Aggarwal100% (4)
- APT LanguageDocument69 pagesAPT LanguageSanapathi Prasad100% (1)
- Module 2 APTDocument75 pagesModule 2 APTFRANCIS THOMASNo ratings yet
- AptDocument86 pagesAptSreehari ViswanathanNo ratings yet
- Lecture 9Document22 pagesLecture 9anon_106272691No ratings yet
- APT cnc2Document65 pagesAPT cnc2Sabiha Hajdarbegović-HafizovićNo ratings yet
- Laying Out of Horizontal CurvesDocument4 pagesLaying Out of Horizontal CurvesSebastian Seth Santos CabahugNo ratings yet
- 07 - Apt LanguageDocument76 pages07 - Apt LanguageNamanNo ratings yet
- Autocad Tools: Computer Aided DraftingDocument23 pagesAutocad Tools: Computer Aided DraftingTricia Marie LagramadaNo ratings yet
- Third LectureDocument7 pagesThird Lecturept.22.132No ratings yet
- APT Part Programming Presentation 2017Document57 pagesAPT Part Programming Presentation 2017hondo tinemi dNo ratings yet
- Chapter 3 p71-74Document4 pagesChapter 3 p71-74FaisalNo ratings yet
- Apt PDFDocument45 pagesApt PDFJignesh Rohit0% (1)
- APT LanguageDocument67 pagesAPT LanguagesumeshNo ratings yet
- FW1 Simple Horizontal CurveDocument5 pagesFW1 Simple Horizontal CurveAthena ClubNo ratings yet
- Apt 1Document43 pagesApt 1Promit ChoudhuryNo ratings yet
- Simple CurvesDocument8 pagesSimple CurvesAnonymous KUNMyMBEE0% (1)
- APT LanguageDocument21 pagesAPT LanguageRandy WalterNo ratings yet
- Bézier Curves & Surfaces: Glenn G. ChappellDocument20 pagesBézier Curves & Surfaces: Glenn G. ChappellHusseinali HusseinNo ratings yet
- Geopak Coordinate Geometry ConceptsDocument4 pagesGeopak Coordinate Geometry Conceptsandy105286No ratings yet
- Experiment No. - 1: Aim: - The Line CommandDocument29 pagesExperiment No. - 1: Aim: - The Line CommandHimanshuNo ratings yet
- R10 Compiler Design Unit-7 Code OptimizationDocument14 pagesR10 Compiler Design Unit-7 Code OptimizationStephenKarunakarNo ratings yet
- INTERMEDIATE CODE GENERATION & RUNTIME ENVIRNOMENTSDocument35 pagesINTERMEDIATE CODE GENERATION & RUNTIME ENVIRNOMENTSAkshay SNo ratings yet
- Fallsem2016-17 - Mee307 - Eth - 2506 - 22-Sep-2016 - RM001 - 13 AptDocument30 pagesFallsem2016-17 - Mee307 - Eth - 2506 - 22-Sep-2016 - RM001 - 13 AptDeepak Dileep100% (1)
- PIVOT (Pivot Levels)Document3 pagesPIVOT (Pivot Levels)luca pilottiNo ratings yet
- AptDocument47 pagesAptankush100% (1)
- Autocad Lab ManualDocument24 pagesAutocad Lab Manualmadhu.ammu112No ratings yet
- A Fpga Ieee-754-2008 Decimal64 Floating-Point Adder-SubtractorDocument6 pagesA Fpga Ieee-754-2008 Decimal64 Floating-Point Adder-Subtractorlavanya_msNo ratings yet
- APT ProgrammingDocument62 pagesAPT ProgrammingAkhil Chappidi100% (3)
- Apt PrintDocument121 pagesApt PrintPritish MohanNo ratings yet
- 13128466 ١Document20 pages13128466 ١Medo AnaNo ratings yet
- 5 - Associating SCFs With Element PointsDocument2 pages5 - Associating SCFs With Element PointsTran Van DaiNo ratings yet
- SurveyingDocument22 pagesSurveyingFrancis Nano FerrerNo ratings yet
- Chapter 5 Description of Function InstructionsDocument14 pagesChapter 5 Description of Function Instructionsm_abubakarqureshiNo ratings yet
- Bezier CurvesDocument20 pagesBezier CurvesRuchi GuptaNo ratings yet
- Atcd-Unit-5 (1) - 2Document32 pagesAtcd-Unit-5 (1) - 2Duggineni VarunNo ratings yet
- CurvesDocument39 pagesCurvesEdgar DirigeNo ratings yet
- Group 1 - Ce41fa2 (Simple Curves)Document8 pagesGroup 1 - Ce41fa2 (Simple Curves)John Jake TabuzoNo ratings yet
- AptDocument8 pagesAptABINASH PANDA0% (1)
- Part Programming For CNC MachinesDocument36 pagesPart Programming For CNC MachinesMuthuvel M100% (2)
- 2) CAD Lab Manual - ContentsDocument190 pages2) CAD Lab Manual - Contentsdebashish babuNo ratings yet
- Bresenham Line Algorithm: Efficient Pixel-Perfect Line Rendering for Computer VisionFrom EverandBresenham Line Algorithm: Efficient Pixel-Perfect Line Rendering for Computer VisionNo ratings yet
- Curriculum Vitae: Mubashar Sharif Personal InformationDocument1 pageCurriculum Vitae: Mubashar Sharif Personal Informationabdullah bin masoodNo ratings yet
- Shear Stresses in BeamsDocument14 pagesShear Stresses in Beamsabdullah bin masoodNo ratings yet
- AwadDocument2 pagesAwadabdullah bin masoodNo ratings yet
- Internal Moment External MomentDocument2 pagesInternal Moment External Momentabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Dr. Rizwan Saeed ChoudhryDocument24 pagesME 234 Mechanics of Materials - I: Dr. Rizwan Saeed Choudhryabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lectures 29 - 32 Week 11 Axial ProblemsDocument8 pagesME 234 Mechanics of Materials - I: Lectures 29 - 32 Week 11 Axial Problemsabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 11 - 12 StrainDocument17 pagesME 234 Mechanics of Materials - I: Lecture 11 - 12 Strainabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 8-9Document30 pagesME 234 Mechanics of Materials - I: Lecture 8-9abdullah bin masoodNo ratings yet
- Boosting Engine Power: More Power - Four Possibilities With One Common ThreadDocument57 pagesBoosting Engine Power: More Power - Four Possibilities With One Common Threadabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 5-6Document33 pagesME 234 Mechanics of Materials - I: Lecture 5-6abdullah bin masoodNo ratings yet
- 09.11.2013 - Types of Solar DryerDocument5 pages09.11.2013 - Types of Solar Dryerabdullah bin masoodNo ratings yet
- Logic DiagrammingDocument33 pagesLogic Diagrammingabdullah bin masoodNo ratings yet
- Internet and E-Mail Related Mcqs For Tehsildar and Naib Tehsildar (Document30 pagesInternet and E-Mail Related Mcqs For Tehsildar and Naib Tehsildar (abdullah bin masoodNo ratings yet
- PES Mixed Matrix Membranes Incorporating ZIF 8 MXene Nanocompos - 2022 - DesalinDocument12 pagesPES Mixed Matrix Membranes Incorporating ZIF 8 MXene Nanocompos - 2022 - DesalinMariaCameliaStoianNo ratings yet
- Mulk Raj Anands Untouchable An Explorationinto Inner SpaceDocument4 pagesMulk Raj Anands Untouchable An Explorationinto Inner SpaceKazi Ayman RAHMANNo ratings yet
- The UrgeDocument1 pageThe UrgeErol Mazhar AksoyNo ratings yet
- Modern Business Statistics With Microsoft Excel 5th Edition Anderson Solutions Manual DownloadDocument22 pagesModern Business Statistics With Microsoft Excel 5th Edition Anderson Solutions Manual DownloadHassan Mccoy100% (30)
- 1 Introduction To Anatomy For Medical StudentDocument13 pages1 Introduction To Anatomy For Medical StudentOroAsle ManNo ratings yet
- QSVMMDocument7 pagesQSVMMKatherine GilberNo ratings yet
- Grounding SystemDocument186 pagesGrounding Systemjerry TomasNo ratings yet
- C3 Graphic OrganizersDocument25 pagesC3 Graphic OrganizersRomina DaquelNo ratings yet
- Design and Construction ofDocument46 pagesDesign and Construction ofعلي محمود علي عاصيNo ratings yet
- Penngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Document15 pagesPenngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Nur WijayantiNo ratings yet
- 02 Activity 1Document5 pages02 Activity 1Charlotte AbuyNo ratings yet
- English 9 Q1 TOSDocument2 pagesEnglish 9 Q1 TOSJohnfil Ajeno JamolinNo ratings yet
- 4-Csa B137.3-2009Document36 pages4-Csa B137.3-2009AhmadmasrokanNo ratings yet
- Statistics or Paper Pre PHD 2022Document2 pagesStatistics or Paper Pre PHD 2022muragesh mathNo ratings yet
- Week-4 Assignment-4Document3 pagesWeek-4 Assignment-4Youssef HassanNo ratings yet
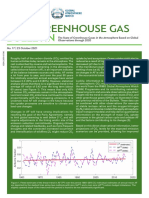
- WMO Greenhouse Gas BulletinDocument10 pagesWMO Greenhouse Gas BulletinWHYY NewsNo ratings yet
- Description: Product DataDocument2 pagesDescription: Product Dataspurwito46No ratings yet
- SPP DOC 203 Architectural Interior ServicesDocument13 pagesSPP DOC 203 Architectural Interior ServicesHana YeppeodaNo ratings yet
- Class VI To X HOLIDAY HOMEWORK 2022-23Document16 pagesClass VI To X HOLIDAY HOMEWORK 2022-23Chiransh GamingNo ratings yet
- 1 (A) - Pile FoundationsDocument35 pages1 (A) - Pile FoundationsMinilik Tikur SewNo ratings yet
- Linear Control System: Presented by Imran Basha SyedDocument35 pagesLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNo ratings yet
- Comparative Analysis of FLC and ANN Techniques For Efficient MPPT in Changing Conditions in JordanDocument20 pagesComparative Analysis of FLC and ANN Techniques For Efficient MPPT in Changing Conditions in JordanInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Introducing Physical Geography 5Th Edition Strahler Test Bank Full Chapter PDFDocument55 pagesIntroducing Physical Geography 5Th Edition Strahler Test Bank Full Chapter PDFstevenwhitextsngyadmk100% (13)
- Ecological Concepts Introduction To Environmental Engineering and Ecology of LifeDocument16 pagesEcological Concepts Introduction To Environmental Engineering and Ecology of LifeJhasper FLores0% (1)
- Snake Oil Stem Cell TherapeuticsDocument3 pagesSnake Oil Stem Cell TherapeuticsAmrit Singh DhillonNo ratings yet
- Ethiopia: Traditional Medicine and The Bridge To Better HealthDocument4 pagesEthiopia: Traditional Medicine and The Bridge To Better HealthKyky RodriguesNo ratings yet
- 1964 - Marchand - Derivation of The Point Spread Function From The Line Spread Function - Journal of The Optical Society of America PDFDocument5 pages1964 - Marchand - Derivation of The Point Spread Function From The Line Spread Function - Journal of The Optical Society of America PDFClaudio BiaginiNo ratings yet
- Matching Stage: By: Anthony Mantuhac Bsa-2Document24 pagesMatching Stage: By: Anthony Mantuhac Bsa-2PremiumNo ratings yet
- Updated-Pearson Edexcel Global Online Training-FreeDocument62 pagesUpdated-Pearson Edexcel Global Online Training-Freecharlesma123No ratings yet