
Stability of Catamarans
Stability of Catamarans
You might also like
- Reeds Vol. 7 Advanced Electrotechnology For Marine EngineersDocument702 pagesReeds Vol. 7 Advanced Electrotechnology For Marine Engineershzhchina168No ratings yet
- Full Sem 2-Ship StabilityDocument189 pagesFull Sem 2-Ship StabilityYOGESH YADAVNo ratings yet
- Simulation of Flow Around KCS HullDocument11 pagesSimulation of Flow Around KCS HullMilovan PericNo ratings yet
- Shallow Water Resistance Charts For Preliminary Vessel DesignDocument18 pagesShallow Water Resistance Charts For Preliminary Vessel DesignshahjadaNo ratings yet
- Woytowich R.calculation of Prope - dec.1979.JSRDocument7 pagesWoytowich R.calculation of Prope - dec.1979.JSRJohn KokarakisNo ratings yet
- BSR SeriesDocument74 pagesBSR SeriesBasem TamNo ratings yet
- CFD Assignment May 2017Document2 pagesCFD Assignment May 2017蒲俊雄No ratings yet
- CODAC Final ReportDocument98 pagesCODAC Final ReportChristopher GarciaNo ratings yet
- Offshore Hydromechanics: Dr. Ir. Pepijn de JongDocument69 pagesOffshore Hydromechanics: Dr. Ir. Pepijn de JongAntonioNo ratings yet
- 3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008Document8 pages3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008kostas.michaNo ratings yet
- 1 s2.0 S0029801817301646 Main PDFDocument15 pages1 s2.0 S0029801817301646 Main PDFOdumoduChigozieUzomaNo ratings yet
- Calculating KB, BMDocument16 pagesCalculating KB, BMKunal BhatiaNo ratings yet
- Resistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) WhereDocument11 pagesResistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) Wheresupriadi90315No ratings yet
- Self Propulsion Tests: Marine Engineering 2019Document23 pagesSelf Propulsion Tests: Marine Engineering 2019Yalqa RizqiNo ratings yet
- An Overview of The Prediction Methods For Roll Damping of ShipsDocument22 pagesAn Overview of The Prediction Methods For Roll Damping of ShipsВасил ЙордановNo ratings yet
- An Approximate Power Prediction MethodDocument5 pagesAn Approximate Power Prediction MethodMerrelNo ratings yet
- Heel Leeway On Resistance and SideforceDocument10 pagesHeel Leeway On Resistance and SideforceklzsailingNo ratings yet
- Visualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelDocument13 pagesVisualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelAnthonyNo ratings yet
- Design and Construction of High Speed, Hard Chine Planing HullDocument8 pagesDesign and Construction of High Speed, Hard Chine Planing Hullkhristc15No ratings yet
- Slamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PDocument4 pagesSlamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PmroghaniNo ratings yet
- Determining The Drag Force With CFD Method ANSYS Workbench 11.00Document13 pagesDetermining The Drag Force With CFD Method ANSYS Workbench 11.00Ravi KhandelwalNo ratings yet
- 3 Set of Working DrawingsDocument20 pages3 Set of Working DrawingsSuriyah SivakumarNo ratings yet
- Motor Yacht Hull Form DesignDocument16 pagesMotor Yacht Hull Form Designale barbNo ratings yet
- Lecture 04Document26 pagesLecture 04Junaid JavaidNo ratings yet
- Wave Restance For High-Speed CatamaransDocument30 pagesWave Restance For High-Speed CatamaransKay OosterwegelNo ratings yet
- U-Botten RevDocument10 pagesU-Botten RevJunaid JavaidNo ratings yet
- 04 NAC Initial Transverse Stability (160213)Document21 pages04 NAC Initial Transverse Stability (160213)Gilles MathieuNo ratings yet
- Duisburg Test Case: Post-Panamax Container Ship For BenchmarkingDocument15 pagesDuisburg Test Case: Post-Panamax Container Ship For BenchmarkingChahbi RamziNo ratings yet
- NAVAL ARCHITECT (Autosaved)Document34 pagesNAVAL ARCHITECT (Autosaved)sufianNo ratings yet
- Hande - A Computer-Aided Design Approach For Hydrofoil ShipsDocument11 pagesHande - A Computer-Aided Design Approach For Hydrofoil Shipsjwpaprk1No ratings yet
- Exercicio KT-J2 MICHIGAN 2016 PDFDocument4 pagesExercicio KT-J2 MICHIGAN 2016 PDFLucas VieiraNo ratings yet
- ENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Document5 pagesENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Luis De GraciaNo ratings yet
- Estimation of Shipmotions Using Closed-Form Expressions: Jørgen Juncher Jensen, Alaa E. Mansour, Anders SmærupolsenDocument25 pagesEstimation of Shipmotions Using Closed-Form Expressions: Jørgen Juncher Jensen, Alaa E. Mansour, Anders SmærupolsenyapsguanNo ratings yet
- Comparison of High Speed CraftsDocument4 pagesComparison of High Speed CraftsAnonymous e3ceN15100% (1)
- Ucl 2016Document305 pagesUcl 2016sawan rajainNo ratings yet
- Seakeeping Assessment of Large Trimaran For Naval Aircraft OperationsDocument29 pagesSeakeeping Assessment of Large Trimaran For Naval Aircraft Operationsалексей петуховNo ratings yet
- The Technical University of Norway: Norwegian Ship Model Experiment TankDocument56 pagesThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranNo ratings yet
- Xiaobo Chen. Offshore Hydrodynamics and ApplicationsDocument19 pagesXiaobo Chen. Offshore Hydrodynamics and ApplicationsYuriy KrayniyNo ratings yet
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- High Speed Towing Tank FacilityDocument4 pagesHigh Speed Towing Tank FacilityAnkit GhoshNo ratings yet
- Paper Part IIDocument8 pagesPaper Part IIPrasanta Sahoo100% (1)
- A Practical System For Hydrodynamic Optimization of Ship Hull FormsDocument7 pagesA Practical System For Hydrodynamic Optimization of Ship Hull FormsSalma SherbazNo ratings yet
- 03 The Ship Design ProcessDocument10 pages03 The Ship Design Processw12n_sbyNo ratings yet
- Optimization of Ship Hull Parameter of Inland Vessel With Respect To Regression Based Resistance Analysis PDFDocument6 pagesOptimization of Ship Hull Parameter of Inland Vessel With Respect To Regression Based Resistance Analysis PDFPierluigiBusettoNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Double Hull Tank BargesDocument10 pagesDouble Hull Tank BargesNithin KannanNo ratings yet
- Catamaran Wetdeck Slamming Loads Using CFDDocument6 pagesCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanNo ratings yet
- Green Sea ModellingDocument9 pagesGreen Sea ModellingJohn simpsonNo ratings yet
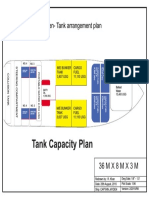
- Tank Capacity PlanDocument1 pageTank Capacity PlanAnonymous ycFeyuLAtNo ratings yet
- Response Amplitude Operator - Wikipedia, The Free EncyclopediaDocument3 pagesResponse Amplitude Operator - Wikipedia, The Free EncyclopediaFuadNo ratings yet
- An Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFDocument63 pagesAn Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFGhalih Rasyid Prayogo100% (1)
- Classification Society - WikipediaDocument6 pagesClassification Society - WikipediaFlavio MoraesNo ratings yet
- WA2 3 HollenbachDocument9 pagesWA2 3 HollenbachMANIU RADU-GEORGIANNo ratings yet
- NA Problems 1Document3 pagesNA Problems 1siddarth amaravathi100% (1)
- Introduction To TSSDocument11 pagesIntroduction To TSSnoczviviNo ratings yet
- Ballast Free Ship DesignDocument3 pagesBallast Free Ship DesignAnonymous UCveMQNo ratings yet
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985From EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNo ratings yet
- Navigating Chinese Cities To Achieve Sustainable Developmen - 2022 - The InnovatDocument8 pagesNavigating Chinese Cities To Achieve Sustainable Developmen - 2022 - The InnovatVinayak29No ratings yet
- K KunduDocument1 pageK KunduVinayak29No ratings yet
- Extracellular Vesicles Mediated Interaction Within Intes - 2022 - Journal of AdvDocument13 pagesExtracellular Vesicles Mediated Interaction Within Intes - 2022 - Journal of AdvVinayak29No ratings yet
- First Insights Into The Honey Bee Apis Mellifera Brain Lip - 2022 - Journal ofDocument15 pagesFirst Insights Into The Honey Bee Apis Mellifera Brain Lip - 2022 - Journal ofVinayak29No ratings yet
- Gut Microbiota Specifically Mediates The Anti Hypercholestero 2022 Journal oDocument12 pagesGut Microbiota Specifically Mediates The Anti Hypercholestero 2022 Journal oVinayak29No ratings yet
- Genetic Divergence and Functional Convergence of Gut Bacter - 2022 - Journal ofDocument13 pagesGenetic Divergence and Functional Convergence of Gut Bacter - 2022 - Journal ofVinayak29No ratings yet
- Salas Edwin 2017 (Zut)Document167 pagesSalas Edwin 2017 (Zut)Vinayak29No ratings yet
- Enzyme Inhibition Methods Based On Au Nanomaterials For Rapi - 2022 - Journal ofDocument14 pagesEnzyme Inhibition Methods Based On Au Nanomaterials For Rapi - 2022 - Journal ofVinayak29No ratings yet
- A de Novo Regulation Design Shows An Effectiveness in 2022 Journal of AdvanDocument18 pagesA de Novo Regulation Design Shows An Effectiveness in 2022 Journal of AdvanVinayak29No ratings yet
- JWST E Book Exoplanet TargetsDocument16 pagesJWST E Book Exoplanet TargetsVinayak29No ratings yet
- The Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsDocument15 pagesThe Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsVinayak29No ratings yet
- Further Computer-Analyzed D Ata of T H E Wageningen B-Screw SeriesDocument12 pagesFurther Computer-Analyzed D Ata of T H E Wageningen B-Screw SeriesVinayak29No ratings yet
- ITTC - Recommended Procedures and Guidelines: Model Manufacture Ship ModelsDocument6 pagesITTC - Recommended Procedures and Guidelines: Model Manufacture Ship ModelsVinayak29No ratings yet
- Damage Stability: Principles of Naval Architecture The Management of Merchant Ship Stability, Trim & StrengthDocument28 pagesDamage Stability: Principles of Naval Architecture The Management of Merchant Ship Stability, Trim & StrengthAnwarul Shafiq AwalludinNo ratings yet
- Azipod ReferencesDocument22 pagesAzipod ReferencesVlad MocanuNo ratings yet
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (2)
- B 27Document63 pagesB 27Andrei ZahaNo ratings yet
- Naval Architecture & Marine Engineering MEng - University of StrathclydeDocument13 pagesNaval Architecture & Marine Engineering MEng - University of StrathclydeMyo Zin AungNo ratings yet
- Load Line Calculation For A Tanker Vessel: (A Case Study of MT Ailsa Craig 1 Vessel)Document14 pagesLoad Line Calculation For A Tanker Vessel: (A Case Study of MT Ailsa Craig 1 Vessel)Ruben SalcedoNo ratings yet
- Stability Cross CurvesDocument17 pagesStability Cross Curvesmahi1437No ratings yet
- Research Paper Semi Finals Week 9 12Document42 pagesResearch Paper Semi Finals Week 9 12Carlo ValdezNo ratings yet
- Eve Men Advanced: Ac With CraftDocument11 pagesEve Men Advanced: Ac With CraftsrhthhtNo ratings yet
- Impostors Among Crewmates by SlidesgoDocument45 pagesImpostors Among Crewmates by SlidesgoArchie J MirandaNo ratings yet
- FinalDocument38 pagesFinalRejith NairNo ratings yet
- Chapter 4 (Some Important Terms)Document11 pagesChapter 4 (Some Important Terms)Ship Wonders75% (4)
- Draft AND Stability Problems AND Answers: AnswerDocument8 pagesDraft AND Stability Problems AND Answers: Answerbernardinodino100% (1)
- What Is Engineering? (Definition and Types)Document14 pagesWhat Is Engineering? (Definition and Types)mshukridNo ratings yet
- 1 Piping Systems On ShipsDocument9 pages1 Piping Systems On ShipsBang NielNo ratings yet
- Sachini-Pathirana - Life-Reflection 231227 073741Document24 pagesSachini-Pathirana - Life-Reflection 231227 073741Gobi NavaNo ratings yet
- Ship Construction Lecture 1 Dr. Essam El-BoklDocument48 pagesShip Construction Lecture 1 Dr. Essam El-BoklEssam83% (6)
- Ship ConstructionDocument645 pagesShip Construction8408 :Rohan NaikwadiNo ratings yet
- ABS Part3 Steel Vessel 2011Document225 pagesABS Part3 Steel Vessel 2011Mohd Firdaus AlmusannaNo ratings yet
- Ship Theory - Longitudinal StabilityDocument15 pagesShip Theory - Longitudinal StabilityAji Putra PNo ratings yet
- Problem Solving Seam226Document4 pagesProblem Solving Seam226Neriza PonceNo ratings yet
- TonnageDocument1 pageTonnageLalitRatheeNo ratings yet
- Chapter 2Document14 pagesChapter 2Guruprasad Kommineni100% (1)
- TonnageDocument6 pagesTonnagejohndmariner123100% (1)
- Ship Terminology Lecture 1Document20 pagesShip Terminology Lecture 1Arwa Hussein100% (3)
- Introduction To Ship Load LinesDocument7 pagesIntroduction To Ship Load Linesนัทเดช เรืองสวนNo ratings yet
- Final General ArrangementDocument1 pageFinal General ArrangementMiguel PiqueroNo ratings yet
- Cat DimensionDocument11 pagesCat Dimensionspyrosschneider4283No ratings yet
- Product Sheet Damen Modular Floating Drydock 15026 02 2018Document2 pagesProduct Sheet Damen Modular Floating Drydock 15026 02 2018Angel Javier Valhondo LindertNo ratings yet



































































































Download as pdf or txt
You might also like
- Reeds Vol. 7 Advanced Electrotechnology For Marine EngineersDocument702 pagesReeds Vol. 7 Advanced Electrotechnology For Marine Engineershzhchina168No ratings yet
- Full Sem 2-Ship StabilityDocument189 pagesFull Sem 2-Ship StabilityYOGESH YADAVNo ratings yet
- Simulation of Flow Around KCS HullDocument11 pagesSimulation of Flow Around KCS HullMilovan PericNo ratings yet
- Shallow Water Resistance Charts For Preliminary Vessel DesignDocument18 pagesShallow Water Resistance Charts For Preliminary Vessel DesignshahjadaNo ratings yet
- Woytowich R.calculation of Prope - dec.1979.JSRDocument7 pagesWoytowich R.calculation of Prope - dec.1979.JSRJohn KokarakisNo ratings yet
- BSR SeriesDocument74 pagesBSR SeriesBasem TamNo ratings yet
- CFD Assignment May 2017Document2 pagesCFD Assignment May 2017蒲俊雄No ratings yet
- CODAC Final ReportDocument98 pagesCODAC Final ReportChristopher GarciaNo ratings yet
- Offshore Hydromechanics: Dr. Ir. Pepijn de JongDocument69 pagesOffshore Hydromechanics: Dr. Ir. Pepijn de JongAntonioNo ratings yet
- 3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008Document8 pages3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008kostas.michaNo ratings yet
- 1 s2.0 S0029801817301646 Main PDFDocument15 pages1 s2.0 S0029801817301646 Main PDFOdumoduChigozieUzomaNo ratings yet
- Calculating KB, BMDocument16 pagesCalculating KB, BMKunal BhatiaNo ratings yet
- Resistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) WhereDocument11 pagesResistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) Wheresupriadi90315No ratings yet
- Self Propulsion Tests: Marine Engineering 2019Document23 pagesSelf Propulsion Tests: Marine Engineering 2019Yalqa RizqiNo ratings yet
- An Overview of The Prediction Methods For Roll Damping of ShipsDocument22 pagesAn Overview of The Prediction Methods For Roll Damping of ShipsВасил ЙордановNo ratings yet
- An Approximate Power Prediction MethodDocument5 pagesAn Approximate Power Prediction MethodMerrelNo ratings yet
- Heel Leeway On Resistance and SideforceDocument10 pagesHeel Leeway On Resistance and SideforceklzsailingNo ratings yet
- Visualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelDocument13 pagesVisualization of The Bubble Sweep-Down Phenomenon Around The Bow of A Ship ModelAnthonyNo ratings yet
- Design and Construction of High Speed, Hard Chine Planing HullDocument8 pagesDesign and Construction of High Speed, Hard Chine Planing Hullkhristc15No ratings yet
- Slamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PDocument4 pagesSlamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PmroghaniNo ratings yet
- Determining The Drag Force With CFD Method ANSYS Workbench 11.00Document13 pagesDetermining The Drag Force With CFD Method ANSYS Workbench 11.00Ravi KhandelwalNo ratings yet
- 3 Set of Working DrawingsDocument20 pages3 Set of Working DrawingsSuriyah SivakumarNo ratings yet
- Motor Yacht Hull Form DesignDocument16 pagesMotor Yacht Hull Form Designale barbNo ratings yet
- Lecture 04Document26 pagesLecture 04Junaid JavaidNo ratings yet
- Wave Restance For High-Speed CatamaransDocument30 pagesWave Restance For High-Speed CatamaransKay OosterwegelNo ratings yet
- U-Botten RevDocument10 pagesU-Botten RevJunaid JavaidNo ratings yet
- 04 NAC Initial Transverse Stability (160213)Document21 pages04 NAC Initial Transverse Stability (160213)Gilles MathieuNo ratings yet
- Duisburg Test Case: Post-Panamax Container Ship For BenchmarkingDocument15 pagesDuisburg Test Case: Post-Panamax Container Ship For BenchmarkingChahbi RamziNo ratings yet
- NAVAL ARCHITECT (Autosaved)Document34 pagesNAVAL ARCHITECT (Autosaved)sufianNo ratings yet
- Hande - A Computer-Aided Design Approach For Hydrofoil ShipsDocument11 pagesHande - A Computer-Aided Design Approach For Hydrofoil Shipsjwpaprk1No ratings yet
- Exercicio KT-J2 MICHIGAN 2016 PDFDocument4 pagesExercicio KT-J2 MICHIGAN 2016 PDFLucas VieiraNo ratings yet
- ENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Document5 pagesENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Luis De GraciaNo ratings yet
- Estimation of Shipmotions Using Closed-Form Expressions: Jørgen Juncher Jensen, Alaa E. Mansour, Anders SmærupolsenDocument25 pagesEstimation of Shipmotions Using Closed-Form Expressions: Jørgen Juncher Jensen, Alaa E. Mansour, Anders SmærupolsenyapsguanNo ratings yet
- Comparison of High Speed CraftsDocument4 pagesComparison of High Speed CraftsAnonymous e3ceN15100% (1)
- Ucl 2016Document305 pagesUcl 2016sawan rajainNo ratings yet
- Seakeeping Assessment of Large Trimaran For Naval Aircraft OperationsDocument29 pagesSeakeeping Assessment of Large Trimaran For Naval Aircraft Operationsалексей петуховNo ratings yet
- The Technical University of Norway: Norwegian Ship Model Experiment TankDocument56 pagesThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranNo ratings yet
- Xiaobo Chen. Offshore Hydrodynamics and ApplicationsDocument19 pagesXiaobo Chen. Offshore Hydrodynamics and ApplicationsYuriy KrayniyNo ratings yet
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- High Speed Towing Tank FacilityDocument4 pagesHigh Speed Towing Tank FacilityAnkit GhoshNo ratings yet
- Paper Part IIDocument8 pagesPaper Part IIPrasanta Sahoo100% (1)
- A Practical System For Hydrodynamic Optimization of Ship Hull FormsDocument7 pagesA Practical System For Hydrodynamic Optimization of Ship Hull FormsSalma SherbazNo ratings yet
- 03 The Ship Design ProcessDocument10 pages03 The Ship Design Processw12n_sbyNo ratings yet
- Optimization of Ship Hull Parameter of Inland Vessel With Respect To Regression Based Resistance Analysis PDFDocument6 pagesOptimization of Ship Hull Parameter of Inland Vessel With Respect To Regression Based Resistance Analysis PDFPierluigiBusettoNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Double Hull Tank BargesDocument10 pagesDouble Hull Tank BargesNithin KannanNo ratings yet
- Catamaran Wetdeck Slamming Loads Using CFDDocument6 pagesCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanNo ratings yet
- Green Sea ModellingDocument9 pagesGreen Sea ModellingJohn simpsonNo ratings yet
- Tank Capacity PlanDocument1 pageTank Capacity PlanAnonymous ycFeyuLAtNo ratings yet
- Response Amplitude Operator - Wikipedia, The Free EncyclopediaDocument3 pagesResponse Amplitude Operator - Wikipedia, The Free EncyclopediaFuadNo ratings yet
- An Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFDocument63 pagesAn Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFGhalih Rasyid Prayogo100% (1)
- Classification Society - WikipediaDocument6 pagesClassification Society - WikipediaFlavio MoraesNo ratings yet
- WA2 3 HollenbachDocument9 pagesWA2 3 HollenbachMANIU RADU-GEORGIANNo ratings yet
- NA Problems 1Document3 pagesNA Problems 1siddarth amaravathi100% (1)
- Introduction To TSSDocument11 pagesIntroduction To TSSnoczviviNo ratings yet
- Ballast Free Ship DesignDocument3 pagesBallast Free Ship DesignAnonymous UCveMQNo ratings yet
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985From EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNo ratings yet
- Navigating Chinese Cities To Achieve Sustainable Developmen - 2022 - The InnovatDocument8 pagesNavigating Chinese Cities To Achieve Sustainable Developmen - 2022 - The InnovatVinayak29No ratings yet
- K KunduDocument1 pageK KunduVinayak29No ratings yet
- Extracellular Vesicles Mediated Interaction Within Intes - 2022 - Journal of AdvDocument13 pagesExtracellular Vesicles Mediated Interaction Within Intes - 2022 - Journal of AdvVinayak29No ratings yet
- First Insights Into The Honey Bee Apis Mellifera Brain Lip - 2022 - Journal ofDocument15 pagesFirst Insights Into The Honey Bee Apis Mellifera Brain Lip - 2022 - Journal ofVinayak29No ratings yet
- Gut Microbiota Specifically Mediates The Anti Hypercholestero 2022 Journal oDocument12 pagesGut Microbiota Specifically Mediates The Anti Hypercholestero 2022 Journal oVinayak29No ratings yet
- Genetic Divergence and Functional Convergence of Gut Bacter - 2022 - Journal ofDocument13 pagesGenetic Divergence and Functional Convergence of Gut Bacter - 2022 - Journal ofVinayak29No ratings yet
- Salas Edwin 2017 (Zut)Document167 pagesSalas Edwin 2017 (Zut)Vinayak29No ratings yet
- Enzyme Inhibition Methods Based On Au Nanomaterials For Rapi - 2022 - Journal ofDocument14 pagesEnzyme Inhibition Methods Based On Au Nanomaterials For Rapi - 2022 - Journal ofVinayak29No ratings yet
- A de Novo Regulation Design Shows An Effectiveness in 2022 Journal of AdvanDocument18 pagesA de Novo Regulation Design Shows An Effectiveness in 2022 Journal of AdvanVinayak29No ratings yet
- JWST E Book Exoplanet TargetsDocument16 pagesJWST E Book Exoplanet TargetsVinayak29No ratings yet
- The Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsDocument15 pagesThe Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsVinayak29No ratings yet
- Further Computer-Analyzed D Ata of T H E Wageningen B-Screw SeriesDocument12 pagesFurther Computer-Analyzed D Ata of T H E Wageningen B-Screw SeriesVinayak29No ratings yet
- ITTC - Recommended Procedures and Guidelines: Model Manufacture Ship ModelsDocument6 pagesITTC - Recommended Procedures and Guidelines: Model Manufacture Ship ModelsVinayak29No ratings yet
- Damage Stability: Principles of Naval Architecture The Management of Merchant Ship Stability, Trim & StrengthDocument28 pagesDamage Stability: Principles of Naval Architecture The Management of Merchant Ship Stability, Trim & StrengthAnwarul Shafiq AwalludinNo ratings yet
- Azipod ReferencesDocument22 pagesAzipod ReferencesVlad MocanuNo ratings yet
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (2)
- B 27Document63 pagesB 27Andrei ZahaNo ratings yet
- Naval Architecture & Marine Engineering MEng - University of StrathclydeDocument13 pagesNaval Architecture & Marine Engineering MEng - University of StrathclydeMyo Zin AungNo ratings yet
- Load Line Calculation For A Tanker Vessel: (A Case Study of MT Ailsa Craig 1 Vessel)Document14 pagesLoad Line Calculation For A Tanker Vessel: (A Case Study of MT Ailsa Craig 1 Vessel)Ruben SalcedoNo ratings yet
- Stability Cross CurvesDocument17 pagesStability Cross Curvesmahi1437No ratings yet
- Research Paper Semi Finals Week 9 12Document42 pagesResearch Paper Semi Finals Week 9 12Carlo ValdezNo ratings yet
- Eve Men Advanced: Ac With CraftDocument11 pagesEve Men Advanced: Ac With CraftsrhthhtNo ratings yet
- Impostors Among Crewmates by SlidesgoDocument45 pagesImpostors Among Crewmates by SlidesgoArchie J MirandaNo ratings yet
- FinalDocument38 pagesFinalRejith NairNo ratings yet
- Chapter 4 (Some Important Terms)Document11 pagesChapter 4 (Some Important Terms)Ship Wonders75% (4)
- Draft AND Stability Problems AND Answers: AnswerDocument8 pagesDraft AND Stability Problems AND Answers: Answerbernardinodino100% (1)
- What Is Engineering? (Definition and Types)Document14 pagesWhat Is Engineering? (Definition and Types)mshukridNo ratings yet
- 1 Piping Systems On ShipsDocument9 pages1 Piping Systems On ShipsBang NielNo ratings yet
- Sachini-Pathirana - Life-Reflection 231227 073741Document24 pagesSachini-Pathirana - Life-Reflection 231227 073741Gobi NavaNo ratings yet
- Ship Construction Lecture 1 Dr. Essam El-BoklDocument48 pagesShip Construction Lecture 1 Dr. Essam El-BoklEssam83% (6)
- Ship ConstructionDocument645 pagesShip Construction8408 :Rohan NaikwadiNo ratings yet
- ABS Part3 Steel Vessel 2011Document225 pagesABS Part3 Steel Vessel 2011Mohd Firdaus AlmusannaNo ratings yet
- Ship Theory - Longitudinal StabilityDocument15 pagesShip Theory - Longitudinal StabilityAji Putra PNo ratings yet
- Problem Solving Seam226Document4 pagesProblem Solving Seam226Neriza PonceNo ratings yet
- TonnageDocument1 pageTonnageLalitRatheeNo ratings yet
- Chapter 2Document14 pagesChapter 2Guruprasad Kommineni100% (1)
- TonnageDocument6 pagesTonnagejohndmariner123100% (1)
- Ship Terminology Lecture 1Document20 pagesShip Terminology Lecture 1Arwa Hussein100% (3)
- Introduction To Ship Load LinesDocument7 pagesIntroduction To Ship Load Linesนัทเดช เรืองสวนNo ratings yet
- Final General ArrangementDocument1 pageFinal General ArrangementMiguel PiqueroNo ratings yet
- Cat DimensionDocument11 pagesCat Dimensionspyrosschneider4283No ratings yet
- Product Sheet Damen Modular Floating Drydock 15026 02 2018Document2 pagesProduct Sheet Damen Modular Floating Drydock 15026 02 2018Angel Javier Valhondo LindertNo ratings yet