Download as docx, pdf, or txt
You might also like
- Packet Headers Subnet BreakdownDocument34 pagesPacket Headers Subnet BreakdownParthiban BeemNo ratings yet
- Electronic Ticket Receipt, January 24 For MR GALBADRAKH DASHBYAMBA PDFDocument2 pagesElectronic Ticket Receipt, January 24 For MR GALBADRAKH DASHBYAMBA PDFД. ГалбадрахNo ratings yet
- Unit Lesson Plan 1Document7 pagesUnit Lesson Plan 1api-243476215No ratings yet
- Colreg SimplifiedDocument29 pagesColreg SimplifiedMac Lenard Carreon100% (2)
- COLREG Training CompletDocument47 pagesCOLREG Training CompletGr4su100% (14)
- No.13 CollRegDocument41 pagesNo.13 CollRegBernard Mamora100% (2)
- New Edition of ADMIRALTY Mariners Handbook NP100Document1 pageNew Edition of ADMIRALTY Mariners Handbook NP100thilina pereraNo ratings yet
- Refurbishment Process in SAP PMDocument5 pagesRefurbishment Process in SAP PMManikandan VijayanNo ratings yet
- 8 Important COLREG Rule Must Be KnownDocument6 pages8 Important COLREG Rule Must Be KnownLiminNo ratings yet
- Radar Plotting Or... Do We Really Understand What ARPA Does?Document11 pagesRadar Plotting Or... Do We Really Understand What ARPA Does?Orlando Quevedo100% (1)
- Brief Explanation On ColRegs Rule 7 To 19Document11 pagesBrief Explanation On ColRegs Rule 7 To 19Mike MSBNo ratings yet
- All Ror & SituationsDocument18 pagesAll Ror & SituationsMigara SampathNo ratings yet
- 8 COLREG Rules Every Navigating Officer Must UnderstandDocument25 pages8 COLREG Rules Every Navigating Officer Must UnderstandCodruţ Erașcu100% (3)
- Explain With ModelDocument5 pagesExplain With ModelArKar SoeNo ratings yet
- Passage V Safe PassageDocument2 pagesPassage V Safe Passagemusamahmood100% (1)
- Masters Standing Orders - MSC ReneeDocument13 pagesMasters Standing Orders - MSC ReneeHimanshu AroraNo ratings yet
- SHIP SIMULATOR PRACTICE NotesDocument9 pagesSHIP SIMULATOR PRACTICE NotesapendavyomlembaNo ratings yet
- Colregs Rule 11-15Document4 pagesColregs Rule 11-15Romelo Jr. OfamenNo ratings yet
- Capt. Kris Askey V Mr. Adi Gupte Oow UnlimitedDocument10 pagesCapt. Kris Askey V Mr. Adi Gupte Oow UnlimitedSoul MarinerNo ratings yet
- Rule of The Road 2012Document25 pagesRule of The Road 2012Lalit ChoudharyNo ratings yet
- F1 NotesDocument9 pagesF1 NotesKarthick SNo ratings yet
- Bridge DutiesDocument4 pagesBridge DutiesLynton MenezesNo ratings yet
- Steering and Engine OrdersDocument13 pagesSteering and Engine Orderspawan singhNo ratings yet
- Rule 06 - Safe Speed - Part ADocument19 pagesRule 06 - Safe Speed - Part AMitch SpeederNo ratings yet
- 5 Effective Radar Techniques For Navigators PART. 2Document7 pages5 Effective Radar Techniques For Navigators PART. 2Orlando Quevedo100% (1)
- Dwatch RULE 19Document10 pagesDwatch RULE 19REYNALD TEJERONo ratings yet
- 5 Simple Mistakes Ship Navigators Make That Can Lead To AccidentsDocument47 pages5 Simple Mistakes Ship Navigators Make That Can Lead To AccidentsJunior Ochoa100% (1)
- Master (Unlimited) Orals Report - Unknown - Belfast - AnonDocument4 pagesMaster (Unlimited) Orals Report - Unknown - Belfast - AnonAmit SharmaNo ratings yet
- ESSAY (Labanes)Document1 pageESSAY (Labanes)Adrian ViejoNo ratings yet
- Nama: Winda Furoidatul Khusnah NRP: 0519140127 Kelas: D4 K3 RPL Ix Tugas Topic 9Document2 pagesNama: Winda Furoidatul Khusnah NRP: 0519140127 Kelas: D4 K3 RPL Ix Tugas Topic 9Winda Furoidatul KhusnahNo ratings yet
- Why Master Standing Instructions Is Important??Document11 pagesWhy Master Standing Instructions Is Important??Владислав Комаров100% (1)
- Questions Shipping AgenciesDocument4 pagesQuestions Shipping AgenciesAldrin LesiguesNo ratings yet
- Speed Through Water or Speed Over GroundDocument17 pagesSpeed Through Water or Speed Over GroundPanagiotis MouzenidisNo ratings yet
- Nav Essay 300 Words EachDocument4 pagesNav Essay 300 Words Eachtoledo.arvingarret.pntcNo ratings yet
- Rules of The Road 1-19Document39 pagesRules of The Road 1-19Jerico Vernard Delos Reyes100% (2)
- Speed Through Water or Speed Over Ground, Which One To Use - MDocument13 pagesSpeed Through Water or Speed Over Ground, Which One To Use - MYudi DarmawanNo ratings yet
- Master's Night OrdersDocument4 pagesMaster's Night OrdersDaniel Mocanu100% (6)
- The Anchor Plan: NB. Masters, or Officers in Charge, Should Consider That Taking The VesselDocument16 pagesThe Anchor Plan: NB. Masters, or Officers in Charge, Should Consider That Taking The VesselRai ShakilNo ratings yet
- AnchoringDocument12 pagesAnchoringDryanmNo ratings yet
- P2TL 4-19, OkDocument26 pagesP2TL 4-19, OkJamal Jamal100% (1)
- COLREG MIDTERM EXAM - 1B9Document4 pagesCOLREG MIDTERM EXAM - 1B9mia edNo ratings yet
- MasterDocument17 pagesMasterCelal Bozdogan100% (1)
- 06 AnchorDocument4 pages06 AnchorahikmathNo ratings yet
- Colregs Rule 14 Head On SituationDocument1 pageColregs Rule 14 Head On SituationAlex Moreno GarcíaNo ratings yet
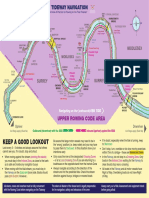
- Keep A Good Lookout: Upper Rowing Code AreaDocument2 pagesKeep A Good Lookout: Upper Rowing Code AreayohoNo ratings yet
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Document19 pagesThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis Mouzenidis100% (1)
- Rule 07 - Risk of Collision RORDocument67 pagesRule 07 - Risk of Collision RORsid487100% (1)
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Document19 pagesThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis MouzenidisNo ratings yet
- PX Stand OrdDocument2 pagesPX Stand OrdMelih KutluNo ratings yet
- Durban SBM Terminal Handbook July 2017Document23 pagesDurban SBM Terminal Handbook July 2017nithzbloggerNo ratings yet
- ActionsDocument52 pagesActionsDanial SaeiNo ratings yet
- Rules of The Road Purpose and ScopeDocument137 pagesRules of The Road Purpose and Scopesid bez100% (2)
- FW: MISC/006AS/22 - Feedback On VDR Back Up Review: Capt. A.N.RizviDocument4 pagesFW: MISC/006AS/22 - Feedback On VDR Back Up Review: Capt. A.N.RizviAnshul GalavNo ratings yet
- Collisions, Groundings, Near-Misses and Close Quarter Situations at SeaDocument4 pagesCollisions, Groundings, Near-Misses and Close Quarter Situations at SeaAtlante Global TransportNo ratings yet
- Anchoring ShipDocument277 pagesAnchoring ShipVinod KumarNo ratings yet
- Colregs Rule 14 Head On Situation PDFDocument1 pageColregs Rule 14 Head On Situation PDFsabbirhossain4gNo ratings yet
- Chief Mate Cochin Oral QuestionsDocument13 pagesChief Mate Cochin Oral QuestionsArun Varghese100% (1)
- RoR - Lesson 5 - Rules 4-10Document16 pagesRoR - Lesson 5 - Rules 4-10Jeet SinghNo ratings yet
- D Watch (Labanes)Document3 pagesD Watch (Labanes)Adrian ViejoNo ratings yet
- Capt. SangamDocument31 pagesCapt. SangamSulaiman Jamaludin100% (1)
- Rollover of Heavy Vehicles: Chairman's Technical ColumnDocument5 pagesRollover of Heavy Vehicles: Chairman's Technical ColumnBob RockNo ratings yet
- Safe WaterDocument3 pagesSafe WaterJoshua NazarreaNo ratings yet
- The Island Hopping Digital Guide To The Dominican Republic: Including: Luperón, Cofresi (Ocean World Marina), Puerto Plata, Sosúa, Rio San Juan, and Much MoreFrom EverandThe Island Hopping Digital Guide To The Dominican Republic: Including: Luperón, Cofresi (Ocean World Marina), Puerto Plata, Sosúa, Rio San Juan, and Much MoreNo ratings yet
- How To Do Auto Pilot Test?Document9 pagesHow To Do Auto Pilot Test?thilina perera100% (1)
- Navtex NTMDocument2 pagesNavtex NTMthilina pereraNo ratings yet
- Summarized Definitions SPL-ML-EL-CMLDocument1 pageSummarized Definitions SPL-ML-EL-CMLthilina pereraNo ratings yet
- MSS Cir/ 01-2021: Democratic Socialist Republic of Sri LankaDocument7 pagesMSS Cir/ 01-2021: Democratic Socialist Republic of Sri Lankathilina pereraNo ratings yet
- Scania 124 420 HPDocument14 pagesScania 124 420 HPJasenko IsakovićNo ratings yet
- Sa-Akx18 SMDocument66 pagesSa-Akx18 SMFelipe L-m67% (3)
- Tubing Convey PerforationDocument50 pagesTubing Convey PerforationRaed fouadNo ratings yet
- P521 OrderForm - V18 - 09 - 2014Document11 pagesP521 OrderForm - V18 - 09 - 2014Pakde NdokNo ratings yet
- CxSuite Scanned Vulnerabilities List 7.14 PDFDocument15 pagesCxSuite Scanned Vulnerabilities List 7.14 PDFFlorino IsletaNo ratings yet
- Design Method For Knowledge Base Systems in Education Using COKB-ONTDocument7 pagesDesign Method For Knowledge Base Systems in Education Using COKB-ONTSam NamNo ratings yet
- Downtown Revitalization Initiative: City of Amsterdam, NYDocument36 pagesDowntown Revitalization Initiative: City of Amsterdam, NYKathryn HumeNo ratings yet
- Enercat 1Document8 pagesEnercat 1avinavgautam100% (1)
- Safety Data Sheet: 1. IdentificationDocument6 pagesSafety Data Sheet: 1. IdentificationdoublekindustriesNo ratings yet
- High-Speed Flight Propulsion SystemsDocument538 pagesHigh-Speed Flight Propulsion SystemsHoàng DavidNo ratings yet
- AD-55295-01-CT - F-MDR STERRAD Consumables Catalogue - 14202NL - FINAL - TM - NDocument2 pagesAD-55295-01-CT - F-MDR STERRAD Consumables Catalogue - 14202NL - FINAL - TM - NAbdessamad ZaherNo ratings yet
- Distributed Dbms ArchitectureDocument16 pagesDistributed Dbms ArchitectureAbid Farooq BhuttaNo ratings yet
- 3d Architectural RenderingDocument2 pages3d Architectural RenderingMichelle Jeanne DenoreNo ratings yet
- PRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Document73 pagesPRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Sebastian PettersNo ratings yet
- GTH4013SX Parts ManualDocument226 pagesGTH4013SX Parts ManualheniNo ratings yet
- Swing JavabuilderDocument42 pagesSwing Javabuilderjacek996645100% (2)
- Au 3Document439 pagesAu 3Amit SinghNo ratings yet
- Cycle Timer Unit For Solenoids: SKU: CT4516Document2 pagesCycle Timer Unit For Solenoids: SKU: CT4516Pedro SantosNo ratings yet
- FlowchartDocument6 pagesFlowchartyleno_meNo ratings yet
- Benchmarking Leading SupplyDocument18 pagesBenchmarking Leading SupplyHamet Huallpa PazNo ratings yet
- Updated Release and Due Submission ScheduleDocument1 pageUpdated Release and Due Submission ScheduleLorenzo R. BelardoNo ratings yet
- ME8595 Thermal Engineering IIDocument4 pagesME8595 Thermal Engineering IIHarry HarryNo ratings yet
- Hypothesis Testing LectureDocument28 pagesHypothesis Testing LectureyogibhNo ratings yet
- Worksheet DMCDocument3 pagesWorksheet DMCAamir YounusNo ratings yet
- Tone of The PassageDocument5 pagesTone of The PassageLalisa ManobaNo ratings yet
- Catalogue AIR TORQUE N° 4thG.-R-BDocument6 pagesCatalogue AIR TORQUE N° 4thG.-R-BpmmparanaNo ratings yet